
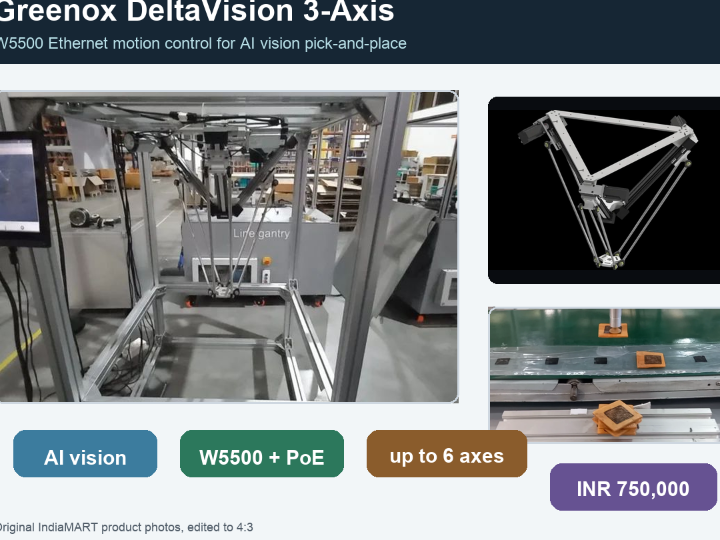
How Does Greenox DeltaVision Use W5500 Ethernet for AI Vision Delta Robots?
Greenox DeltaVision is an INR 750,000 delta robot system using a Blueoyster W5500 Ethernet motion controller for AI vision pick-and-place.

WIZnet - W5500
x 1
Blueoyster motion controller Ethernet interface with PoE, listed for Greenox DeltaVision.
Overview
Greenox E-Library Private Limited is a Navi Mumbai, India vendor that describes itself as an AI waste analytics and segregation company. Its IndiaMART listing for the Greenox DeltaVision Complete System 3 Axis presents a commercial AI vision delta robot cell where a Blueoyster motion controller specifies WIZnet W5500 Ethernet for the motion-control layer.
The product is positioned as a turnkey pick-and-place system for assembly lines, packaging, sorting, education, and R&D. The listing shows a 5 kg payload, a 660 mm operating range, integrated vision, AC servo motors, AC 220 V power, and a cycle-speed claim of 80-100 picks per minute depending on payload and trajectory complexity. A linked product video and shared PDF brochure add the deeper control-system story: AI vision and ROS path planning run on the main controller, while the Blueoyster motion controller uses W5500 Ethernet, PoE, UDP motion execution, and support for up to 6 independent axes.
Vendor, Availability, and Price
Greenox E-Library Private Limited is listed on IndiaMART as a trader-retailer in Navi Mumbai, Thane, Maharashtra, India. The seller profile says Greenox is "a leading AI waste analytics and segregation company" working on waste analysis and segregation, and the profile lists the firm as a limited company with a GST number masked by IndiaMART.
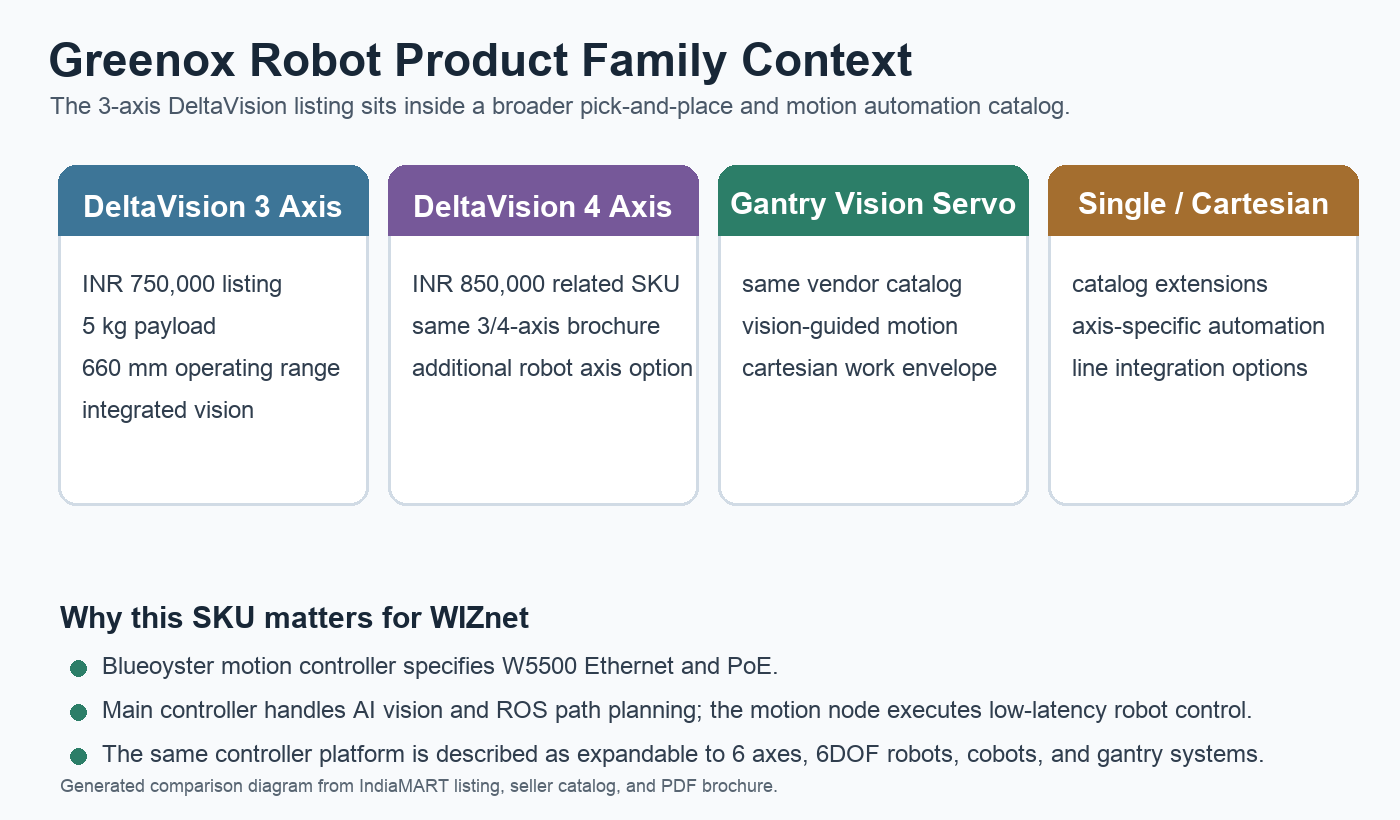
The 3-axis DeltaVision listing is priced at INR 750,000. Around 2026-06-18 mid-market rates, that is approximately USD 7.9k and roughly KRW 12.0 million, but exchange rates move and the IndiaMART price in Indian rupees is the source of record. The listing marks the product as in stock and the source data includes a 3-week delivery-time field. The same seller catalog also lists a Greenox DeltaVision Complete System 4 Axis, a Greenox Gantry Vision Servo System, a Single Axis Industrial Robot, and a Cartesian Coordinate Robot, so this product should be read as one SKU inside a wider Greenox robotic motion and vision catalog.
System Configuration
The public listing and brochure describe a split architecture. The main controller is the AI and compute side. It is specified with 8GB 128-bit LPDDR5 memory at 102 GB/s bandwidth, an NVIDIA GPU up to 70 AI TOPS, an 8-core 64-bit processor at 2.5 GHz, four dedicated sensor ports, up to three independent vacuum triggers, four USB 3.2 Gen2 Type-A connectors, one USB Type-C UFP connector, a 40-pin expansion header for UART, SPI, I2S, I2C, and GPIO, and one GbE connector.
The motion side is the Blueoyster motion controller. The brochure specifies a W5500 Ethernet interface, 16MB Flash, 8MB PSRAM, Ethernet with PoE, Wi-Fi 802.11 b/g/n, Bluetooth 5, and independent control for up to 6 axes. That matters because the W5500 is not just a generic product-page keyword here. It is named in the controller that sits between the high-level vision/planning computer and the robot's real motion execution.

The listing names AC servo motors and anodized aluminium construction. The PDF expands this with NEMA 34 motors up to 3.2 N-m torque, NEMA 42 motors up to 6 N-m torque, Blueoyster AC motor drivers, Modbus TCP and EtherCAT support, 17-bit magnetic encoders, and 23-bit optical encoders. These are presented as public product specifications, not open-source design files, so the article treats them as vendor data rather than independently tested performance.
Vision and Pick-and-Place Workflow
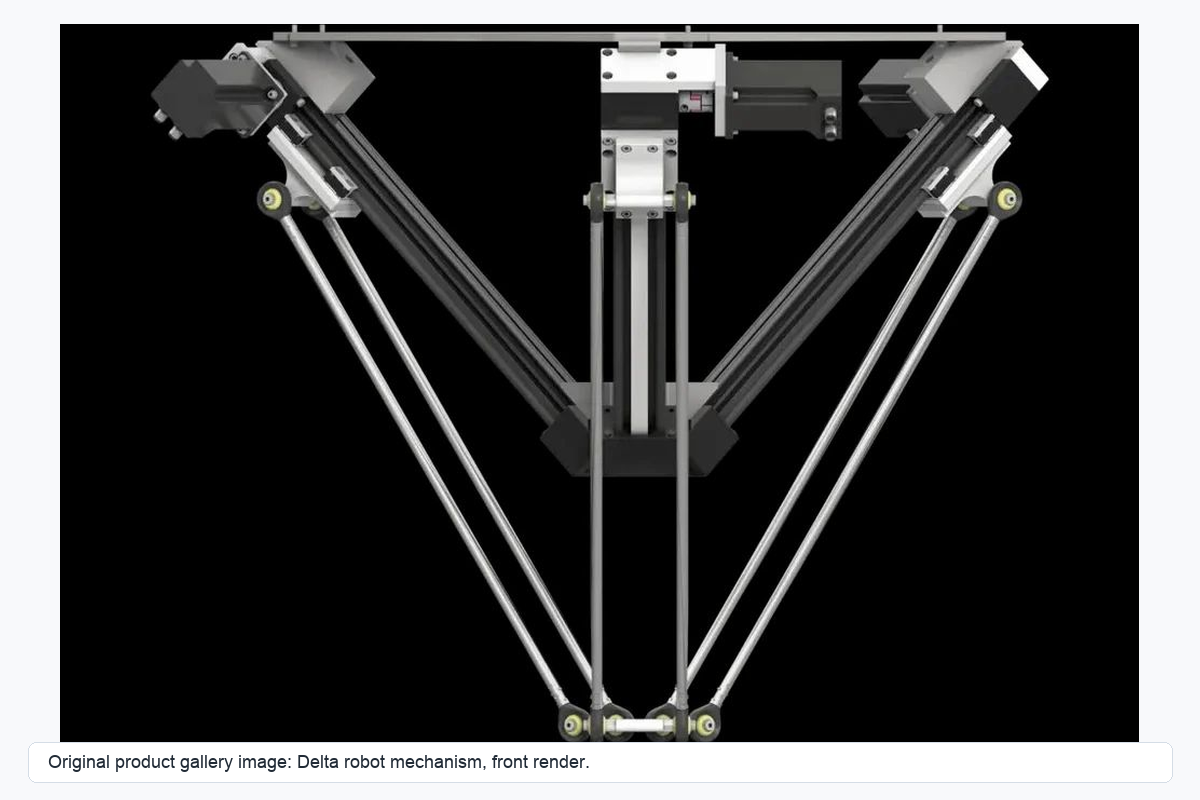
DeltaVision combines a robot mechanism with camera-based vision. The listing describes integrated vision, while the PDF lists two vision-system options: an Intel RealSense-based system and a high-resolution USB3/GigE camera path with embedded processing. The brochure also describes object detection, segmentation, shape recognition, pose estimation, ROS middleware, C-path and L-path trajectory generation, and real-time trajectory execution synchronized with AC servo control.

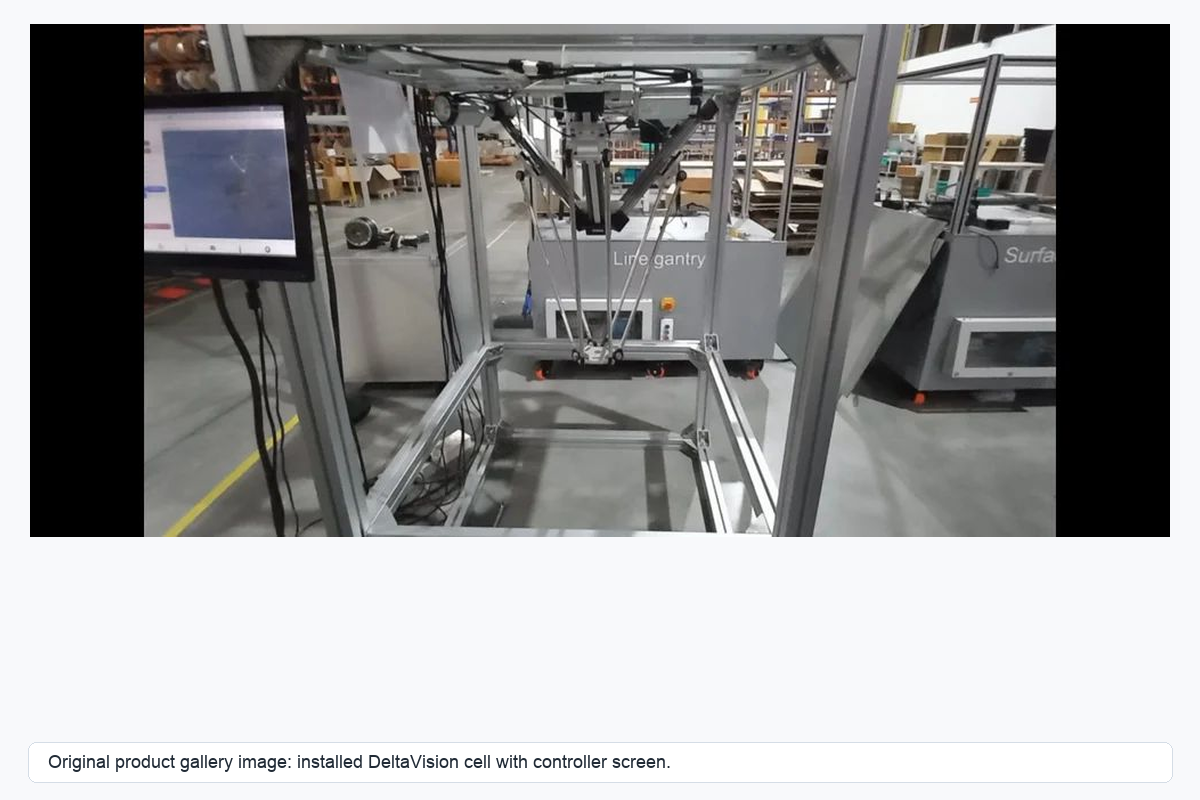
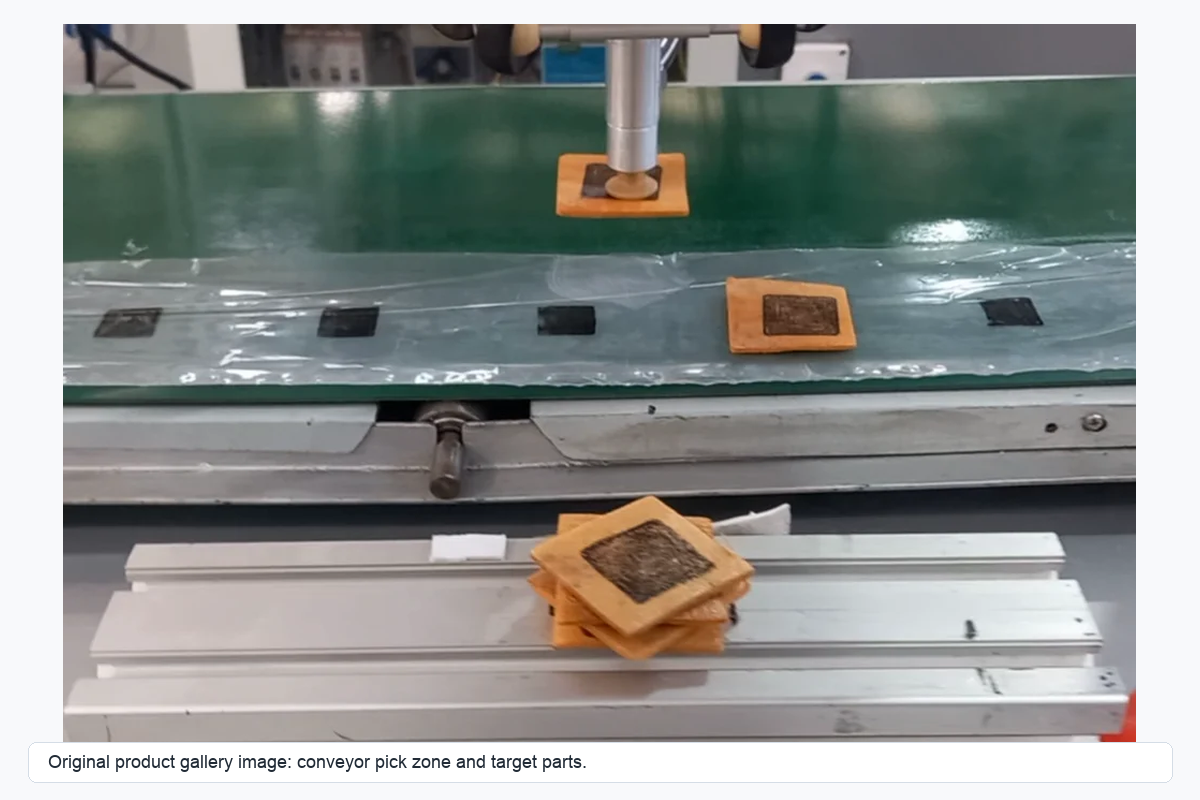
This workflow is especially relevant to Greenox because the company profile emphasizes AI waste analytics and segregation. The original media shows the robot picking from mixed objects, and the listing places the system in packaging, assembly, sorting, and end-of-line automation. In practical terms, the vision controller detects a target, path planning converts the target pose into motion commands, and the motion controller executes the pick sequence through servo drives and vacuum triggers.
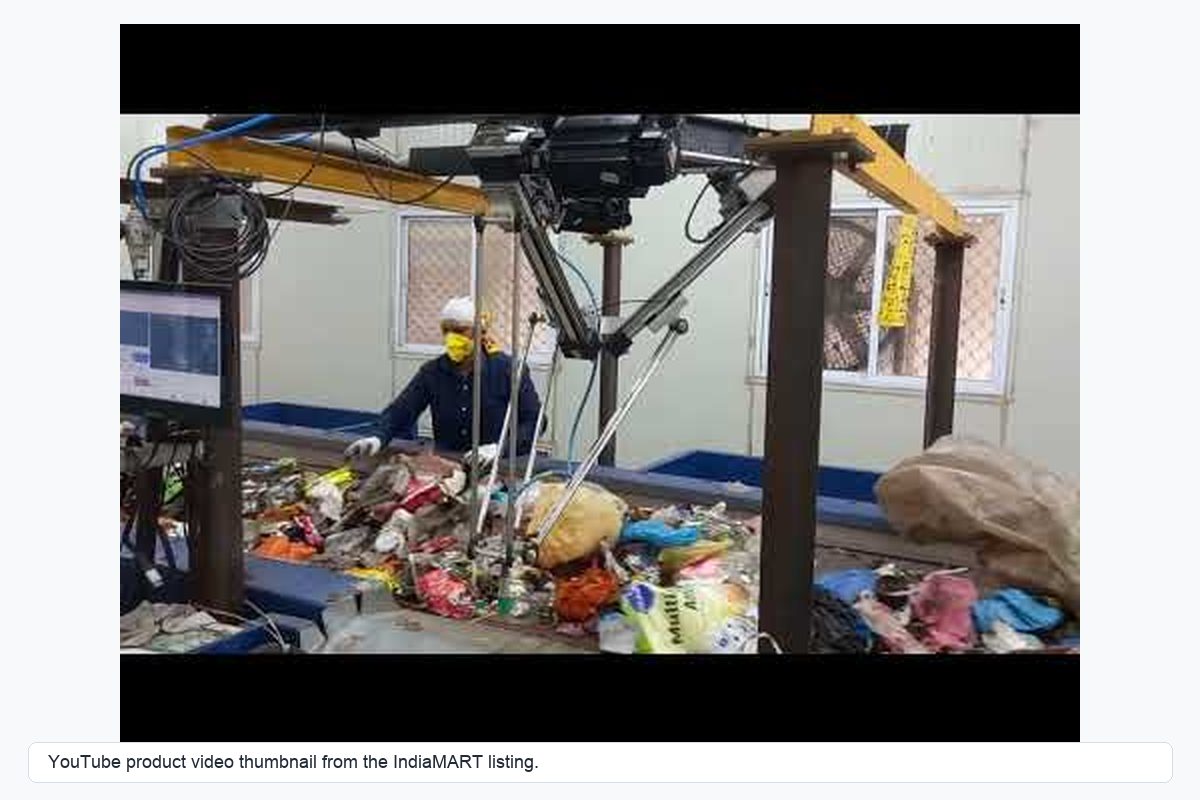
The original IndiaMART listing also links a product video. The video is useful because it gives readers a live view of the robot cell rather than only a static render.
System Architecture and Data Flow
The system separates high-level perception from lower-level motion. The main controller handles AI inference, ROS messaging, the operator GUI, and path planning. The motion controller is where the W5500-based Ethernet interface becomes important: the brochure describes UDP for real-time motion execution, Ethernet for system networking, and USB3.2 for vision data. Motor drivers then handle the servo side through Modbus TCP or EtherCAT, while sensors and vacuum triggers close the loop around the end effector.
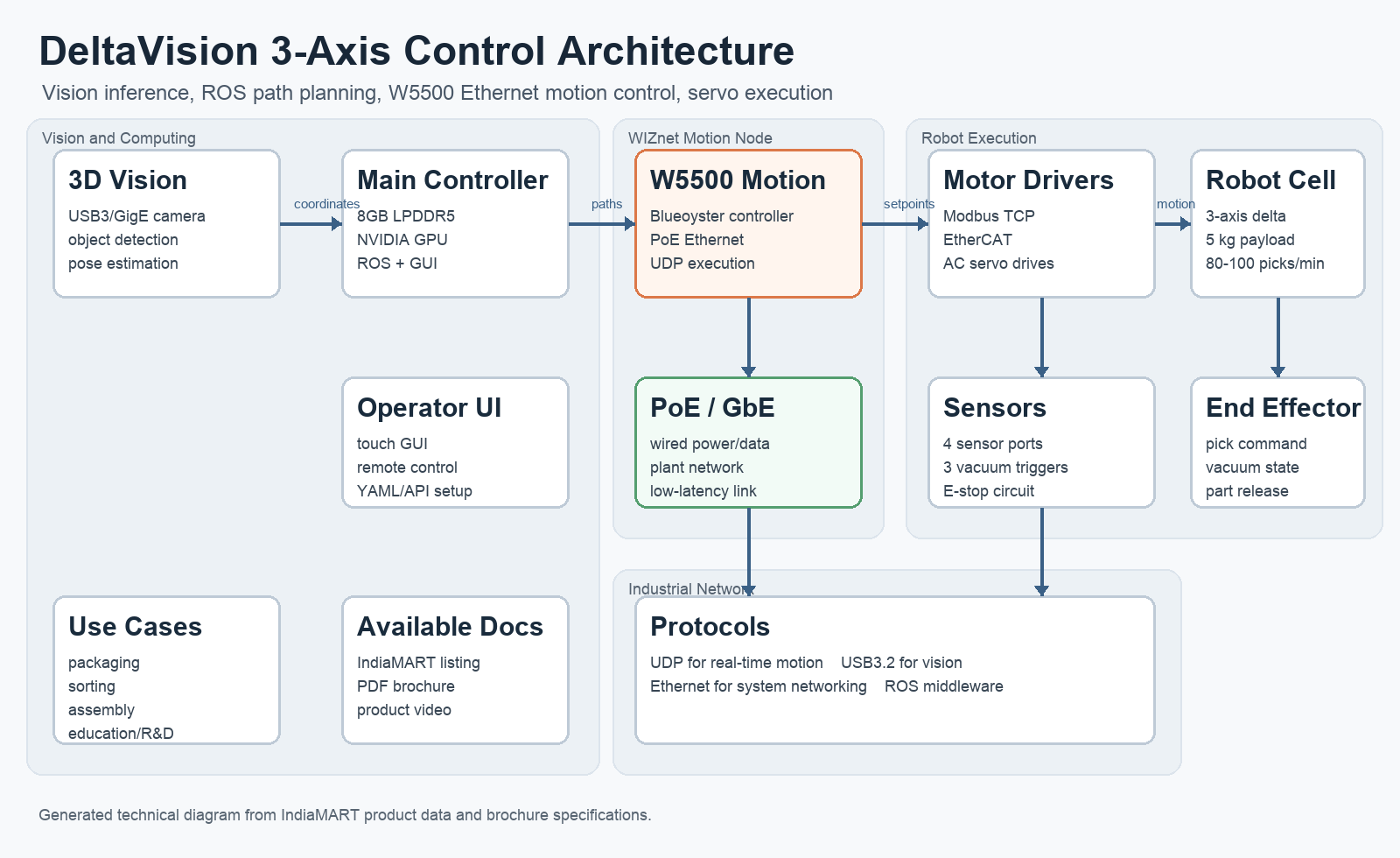
This makes the product different from a simple networked sensor. The W5500 sits in a motion-control path where reliable wired Ethernet and PoE can help keep robot control physically separated from the compute-heavy AI vision workload.
Role of the WIZnet Chip
The named WIZnet component is the W5500 inside the Blueoyster motion controller. W5500 is a hardwired TCP/IP Ethernet controller, so it lets an embedded controller handle Ethernet communication without pushing all packet handling into the main MCU firmware. In this product, the W5500 interface is tied to a controller that also exposes PoE Ethernet, Wi-Fi, Bluetooth 5, Flash, PSRAM, and up to 6-axis motion control.
For the DeltaVision system, the W5500's value is the wired motion-control boundary. AI vision, segmentation, and ROS path planning can run on the main controller, while the motion controller provides a deterministic Ethernet-facing node for real-time execution traffic. The public materials do not expose firmware source, so the exact socket API path is not visible. Still, the product documentation is explicit that W5500 Ethernet is part of the motion controller specification, and the PDF's UDP motion-execution statement explains why Ethernet latency and reliability matter in this design.
Where It Fits: Value and Limits
DeltaVision fits production cells that need fast visual picking, sorting, packaging, and repetitive assembly. It also fits education and R&D settings where a complete robot, vision, and motion stack is more useful than buying only a controller board. For WIZnet readers, it is a commercial example of W5500 being used in a robot motion controller rather than only in a small IoT device.
There are limits in the public data. The listing is for a 3-axis product, while the downloadable brochure is shared across a 3/4-axis or 4-axis family, so the post treats the 3-axis listing and the broader PDF specifications separately. The page states 80-100 picks per minute, while the PDF includes 60-90 and 60-80 picks-per-minute ranges in different places. Firmware, schematics, and test reports are not public, and the brochure says full system ISO 13849 compliance is pending. Those limits do not make the listing less interesting, but they do define how far a technical article should claim.
Related WIZnet Maker Projects
ESP32 + W5500 EtherCAT-WiFi Hybrid Control System is related because it also connects W5500 to robot-control networking, but it is a maker demo rather than a commercial delta robot system.
EtherCAT Motor Control Example on Raspberry Pi 4 (SOEM + SPI-W5500) is related at the motion-control layer. It shows a lower-level motor-control workflow with Raspberry Pi, SOEM, and W5500, while DeltaVision packages motion control into a full robot cell.
Motion4Sim Controller Next Gen is related as another VAR motion controller where W5500-based Ethernet is used in a commercial motion platform. Its application is simulation motion rather than AI vision pick-and-place, so it is similar in control architecture but different in market.
FAQ
Q. What does Greenox DeltaVision use W5500 for? It uses W5500 Ethernet in the Blueoyster motion controller, the part of the system that connects high-level robot planning to motion execution. The public PDF also mentions UDP for real-time motion execution.
Q. Is this product a 3-axis or 4-axis system? The IndiaMART product page is specifically the Greenox DeltaVision Complete System 3 Axis. The downloadable brochure and seller catalog cover a broader 3/4-axis family, and the same seller also lists a 4-axis SKU.
Q. What does the main controller do? The main controller is the AI and computing side. The public specifications list 8GB LPDDR5 memory, an NVIDIA GPU up to 70 AI TOPS, an 8-core 64-bit processor, sensor ports, vacuum trigger support, USB3.2, a 40-pin expansion header, and GbE.
Q. Does the motion controller support wireless networking? The brochure lists Ethernet with PoE, Wi-Fi 802.11 b/g/n, and Bluetooth 5. The article does not claim verified hybrid wired/wireless operation because the public data does not prove simultaneous production roles.
Q. What should buyers verify before treating it as a production-ready robot cell? Buyers should request detailed firmware, safety, servo-drive, and compliance documentation from the vendor. Public materials state in-house testing and pending full ISO 13849 compliance, so those details should be checked directly for production deployment.
한국어 (Korean)
개요
Greenox E-Library Private Limited는 인도 Navi Mumbai에 있는 회사이며, 회사 프로필에서는 AI 기반 폐기물 분석과 분류를 다루는 회사로 소개되어 있습니다. IndiaMART의 Greenox DeltaVision Complete System 3 Axis 제품은 AI 비전 기반 델타 로봇 셀이고, Blueoyster 모션 컨트롤러 사양에 WIZnet W5500 Ethernet이 명시되어 있습니다.
이 제품은 조립 라인, 포장, 분류, 교육, R&D를 위한 턴키 pick-and-place 시스템으로 제시됩니다. 제품 페이지에는 5 kg 페이로드, 660 mm 동작 범위, 통합 비전, AC 서보 모터, AC 220 V 전원, 그리고 페이로드와 궤적 복잡도에 따라 80-100 picks per minute이 가능하다고 적혀 있습니다. 연결된 제품 영상과 PDF 브로셔를 보면 구조가 더 분명합니다. AI 비전과 ROS 경로 계획은 메인 컨트롤러가 담당하고, Blueoyster 모션 컨트롤러는 W5500 Ethernet, PoE, UDP 모션 실행, 최대 6축 독립 제어를 담당합니다.
벤더, 가격, 구매 정보
Greenox E-Library Private Limited는 IndiaMART에서 인도 Maharashtra 주 Thane, Navi Mumbai의 trader-retailer로 표시됩니다. 판매자 프로필은 Greenox를 폐기물 분석과 분류를 위한 AI 회사로 설명하며, 법적 상태는 Limited Company로 표시되고 GST 번호는 IndiaMART에서 일부 마스킹되어 있습니다.
3축 DeltaVision 제품 가격은 INR 750,000입니다. 2026-06-18 전후의 중간 환율 기준으로는 대략 USD 7,900, 한화 약 1,200만 원 수준이지만, 환율은 변동되므로 원본 기준 가격은 인도 루피 가격입니다. 제품 페이지는 재고가 있다고 표시하고, 소스 데이터에는 배송 기간 3주 필드도 있습니다. 같은 판매자 카탈로그에는 4축 DeltaVision, Gantry Vision Servo System, Single Axis Industrial Robot, Cartesian Coordinate Robot도 있으므로, 이 제품은 Greenox의 로봇 모션 및 비전 제품군 안에 있는 3축 SKU로 보는 것이 맞습니다.
시스템 구성
공개된 제품 페이지와 브로셔는 역할이 나뉜 구조를 설명합니다. 메인 컨트롤러는 AI와 컴퓨팅 영역입니다. 사양에는 102 GB/s 대역폭의 8GB 128-bit LPDDR5 메모리, 최대 70 AI TOPS의 NVIDIA GPU, 2.5 GHz 8코어 64-bit 프로세서, 전용 센서 포트 4개, 독립 vacuum trigger 최대 3개, USB 3.2 Gen2 Type-A 4개, USB Type-C UFP 1개, UART, SPI, I2S, I2C, GPIO용 40-pin expansion header, GbE 1개가 포함됩니다.
모션 영역은 Blueoyster 모션 컨트롤러입니다. 브로셔에는 W5500 Ethernet, 16MB Flash, 8MB PSRAM, PoE 지원 Ethernet, Wi-Fi 802.11 b/g/n, Bluetooth 5, 그리고 최대 6축 독립 제어가 적혀 있습니다. 여기서 중요한 점은 W5500이 단순 키워드가 아니라, 상위 비전 및 경로 계획 컴퓨터와 실제 로봇 모션 실행 사이에 있는 모션 컨트롤러 사양에 들어간다는 점입니다.
제품 페이지는 AC 서보 모터와 anodized aluminium 구조를 언급합니다. PDF는 NEMA 34 최대 3.2 N-m 모터, NEMA 42 최대 6 N-m 모터, Blueoyster AC motor drivers, Modbus TCP와 EtherCAT 지원, 17-bit magnetic encoder, 23-bit optical encoder까지 설명합니다. 이 사양은 공개 제품 자료에서 가져온 벤더 데이터이며, 독립 테스트 결과나 공개 설계 파일은 아닙니다.
비전과 픽앤플레이스 흐름
DeltaVision은 로봇 메커니즘과 카메라 기반 비전을 결합합니다. 제품 페이지는 통합 비전을 설명하고, PDF는 Intel RealSense 기반 시스템 또는 고해상도 USB3/GigE 카메라 경로를 비전 옵션으로 제시합니다. 또한 object detection, segmentation, shape recognition, pose estimation, ROS middleware, C-path와 L-path trajectory generation, AC servo control과 동기화된 real-time trajectory execution을 설명합니다.
이 흐름은 Greenox의 회사 소개와도 잘 연결됩니다. Greenox는 AI waste analytics and segregation을 강조하고, 원본 미디어에는 혼합 물체에서 로봇이 pick 동작을 수행하는 장면이 있습니다. 실제 동작 관점에서는 비전 컨트롤러가 목표물을 인식하고, 경로 계획이 목표 위치를 모션 명령으로 바꾸며, 모션 컨트롤러가 서보 드라이브와 vacuum trigger를 통해 pick sequence를 실행하는 구조입니다.
원본 IndiaMART 페이지에는 제품 영상도 연결되어 있습니다. 영상은 정적인 렌더가 아니라 실제 로봇 셀을 볼 수 있다는 점에서 유용합니다.
시스템 아키텍처와 데이터 흐름
이 시스템은 상위 인식과 하위 모션 실행을 분리합니다. 메인 컨트롤러는 AI inference, ROS messaging, operator GUI, path planning을 담당합니다. W5500 기반 Ethernet 인터페이스가 중요한 지점은 모션 컨트롤러입니다. 브로셔는 real-time motion execution에 UDP를 사용하고, vision data에는 USB3.2를 사용하며, system networking에는 Ethernet을 사용한다고 설명합니다. 이후 motor drivers가 Modbus TCP 또는 EtherCAT을 통해 서보 쪽을 담당하고, sensor와 vacuum trigger가 end effector 동작을 닫아 줍니다.
따라서 이 제품은 단순 네트워크 센서와 다릅니다. W5500은 AI 비전이라는 무거운 컴퓨팅 작업과 실제 로봇 모션 실행을 분리하는 wired Ethernet 경계에 놓여 있습니다.
WIZnet 칩의 역할
명시된 WIZnet 부품은 Blueoyster 모션 컨트롤러 안의 W5500입니다. W5500은 hardwired TCP/IP Ethernet controller이므로, 임베디드 컨트롤러가 Ethernet 통신을 처리할 때 전체 패킷 처리를 메인 MCU 펌웨어에만 맡기지 않도록 도와줍니다. 이 제품에서 W5500 인터페이스는 PoE Ethernet, Wi-Fi, Bluetooth 5, Flash, PSRAM, 최대 6축 모션 제어를 함께 가진 컨트롤러에 연결됩니다.
DeltaVision에서 W5500의 가치는 wired motion-control boundary입니다. AI vision, segmentation, ROS path planning은 메인 컨트롤러에서 처리하고, 모션 컨트롤러는 real-time execution traffic을 위한 Ethernet-facing node 역할을 합니다. 공개 자료에는 펌웨어 소스가 없기 때문에 정확한 socket API 경로까지는 확인할 수 없습니다. 다만 제품 문서가 W5500 Ethernet을 모션 컨트롤러 사양으로 명시하고 있고, PDF의 UDP motion execution 설명은 이 설계에서 Ethernet latency와 reliability가 왜 중요한지 보여 줍니다.
활용처와 한계
DeltaVision은 빠른 비전 기반 picking, sorting, packaging, 반복 assembly가 필요한 생산 셀에 적합합니다. 컨트롤러 보드만 사는 것보다 완성된 robot, vision, motion stack이 필요한 교육 및 R&D 환경에도 맞습니다. WIZnet 관점에서는 W5500이 작은 IoT 장치가 아니라 상용 로봇 모션 컨트롤러 안에 들어간 사례라는 점에서 의미가 있습니다.
공개 데이터에는 한계가 있습니다. 제품 페이지는 3축 제품이지만 다운로드 브로셔는 3/4축 또는 4축 제품군 공통 문서입니다. 그래서 이 글은 3축 제품 페이지와 더 넓은 PDF 사양을 분리해서 다룹니다. 제품 페이지는 80-100 picks per minute을 말하지만, PDF에는 60-90과 60-80 picks per minute 범위도 함께 나옵니다. 펌웨어, 회로도, 테스트 리포트는 공개되어 있지 않고, 브로셔에는 full system ISO 13849 compliance가 pending이라고 적혀 있습니다. 이 한계가 제품의 의미를 줄이는 것은 아니지만, 기술 글에서 주장할 수 있는 범위를 정해 줍니다.
관련 WIZnet Maker 프로젝트
ESP32 + W5500 EtherCAT-WiFi Hybrid Control System은 W5500과 robot-control networking이 함께 나온다는 점에서 관련됩니다. 다만 이 글은 상용 델타 로봇 시스템이 아니라 메이커 데모입니다.
EtherCAT Motor Control Example on Raspberry Pi 4 (SOEM + SPI-W5500)은 모션 제어 계층에서 관련됩니다. Raspberry Pi, SOEM, W5500을 이용한 더 낮은 수준의 모터 제어 흐름을 보여 주며, DeltaVision은 이를 완성된 로봇 셀 형태로 패키징한 제품에 가깝습니다.
Motion4Sim Controller Next Gen은 W5500 기반 Ethernet이 상용 모션 플랫폼에 쓰인 또 다른 VAR 사례입니다. 적용 분야는 시뮬레이터 모션이고 DeltaVision은 AI 비전 pick-and-place라는 점이 다릅니다.
FAQ
Q. Greenox DeltaVision은 W5500을 어디에 사용하나요? Blueoyster 모션 컨트롤러의 Ethernet 인터페이스에 W5500이 사용됩니다. 이 컨트롤러는 상위 로봇 planning과 실제 motion execution 사이를 연결하며, 공개 PDF에는 real-time motion execution을 위한 UDP도 언급됩니다.
Q. 이 제품은 3축인가요, 4축인가요? IndiaMART 제품 페이지는 Greenox DeltaVision Complete System 3 Axis입니다. 다만 다운로드 브로셔와 판매자 카탈로그는 더 넓은 3/4축 제품군을 함께 다루고, 같은 판매자는 4축 SKU도 따로 올려 두었습니다.
Q. 메인 컨트롤러는 무엇을 담당하나요? 메인 컨트롤러는 AI와 컴퓨팅 영역을 담당합니다. 공개 사양에는 8GB LPDDR5, 최대 70 AI TOPS NVIDIA GPU, 8코어 64-bit 프로세서, 센서 포트, vacuum trigger 지원, USB3.2, 40-pin expansion header, GbE가 포함됩니다.
Q. 모션 컨트롤러는 무선도 지원하나요? 브로셔에는 Ethernet with PoE, Wi-Fi 802.11 b/g/n, Bluetooth 5가 적혀 있습니다. 다만 공개 자료만으로 wired와 wireless가 실제 생산 운용에서 동시에 역할을 나누어 쓰는지는 확인되지 않으므로, 이 글에서는 verified hybrid operation으로 주장하지 않습니다.
Q. 생산 현장에 바로 넣기 전에 무엇을 확인해야 하나요? 구매자는 펌웨어, 안전, 서보 드라이브, 인증 문서를 벤더에게 직접 확인해야 합니다. 공개 자료에는 in-house testing과 pending full ISO 13849 compliance가 언급되므로, 생산 적용 전에는 이 부분을 구체적으로 확인하는 것이 좋습니다.
-
IndiaMART Product Listing
Original Greenox DeltaVision Complete System 3 Axis listing with price, seller, product images, and video.

-
Greenox Seller Profile
Vendor profile for Greenox E-Library Private Limited in Navi Mumbai, India.
-
DeltaVision PDF Brochure
Shared 3/4-axis brochure with Blueoyster controller, W5500 Ethernet, ROS, vision, and motion specifications.
-
Product Video
Product video linked from the IndiaMART listing.
-
WIZnet W5500 Product Page
WIZnet reference for the W5500 hardwired TCP/IP Ethernet controller.