
Meridian LITE
A project that implements ethernet communication between a robot and its control system


WIZnet - W5500
x 1
1. MERIDIAN TWIN Overview
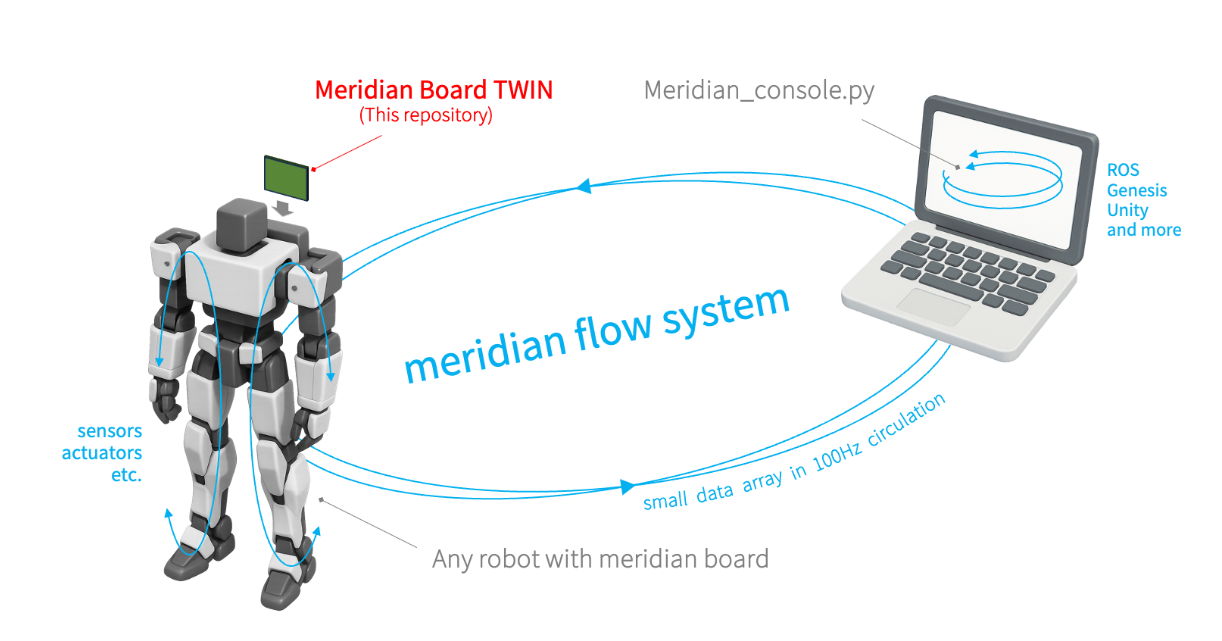
MERIDIAN TWIN is an open-source data-communication framework that combines
real-time control, state sharing, and digital-twin syncing for humanoid and multi-joint robots.
It keeps the robot hardware and the PC/simulator synchronized at 100 Hz with almost no delay,
making the test → simulation → real-robot control loop smooth and continuous.
https://github.com/Ninagawa123/Meridian_TWIN
Key Features
| Category | Description |
|---|---|
| low-latency real-time loop | A Teensy 4.0 collects servo and IMU data and packs it into a Meridim array → An ESP32 sends it wirelessly at 100 Hz |
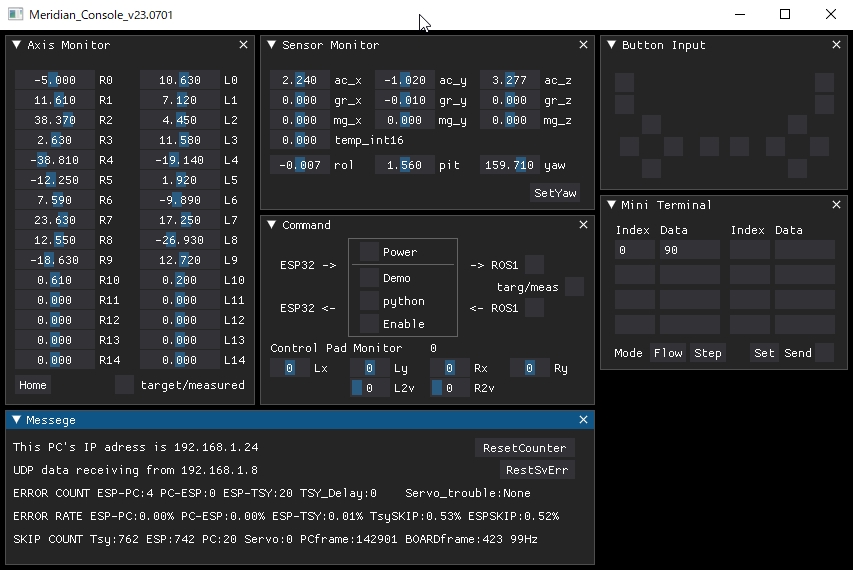
| Fully ROS compatible | Meridim data can be mapped to ROS messages and visualized |
| Modular & DIY-friendly | All circuits, firmware, and PC tools are open. Users can add new modules or select only what they need |
2. Real-time Robot State Transfer Over WiFi
The robot’s MCU controls and reads the servos and 9-axis IMU sensors (MPU6050, AHRS, etc.) in real time.
The MCU then organizes this data into a lightweight Meridim data array.
An ESP32 sends this data wirelessly at 100 Hz, creating a fast loop between the robot and the PC/simulator.
This allows the real robot and its digital model to stay synchronized with almost no visible delay,
providing real-time feedback and smooth twin operation.
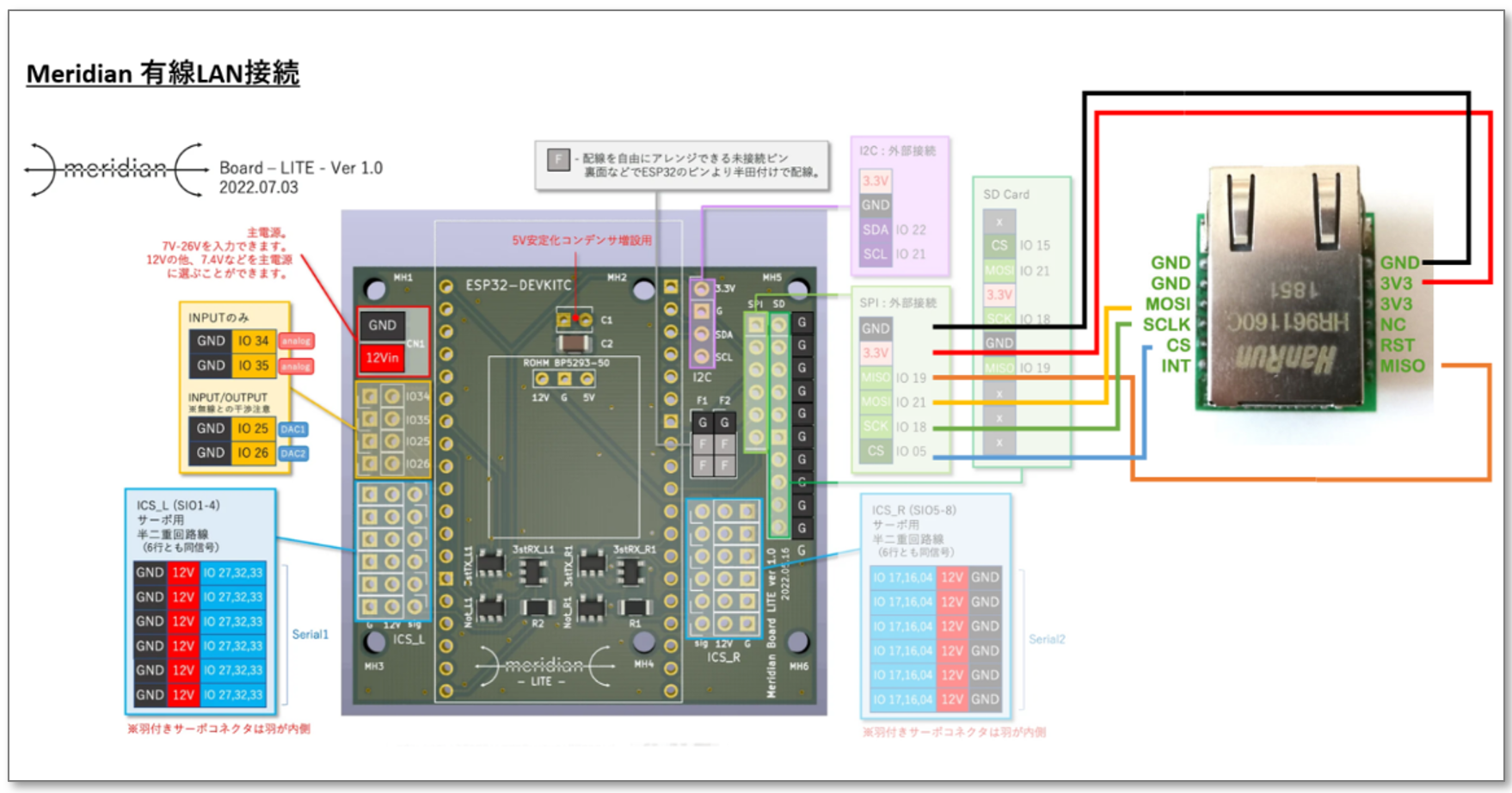
3. Implementing MERIDIAN TWIN with W5500
This repository is based on Meridian_LITE v1.0.1, with the following changes:
The communication method was changed from WiFi to wired Ethernet.
The servo system was changed from KONDO servos to Dynamixel.
A more detailed explanation is also available on the blog:
https://dream-drive.net/2024/01/14/17486/
4. Comparison: ROS vs. MERIDIAN
ROS (Robot Operating System) and MERIDIAN TWIN are not competing platforms.
They work in different layers of a robot system and complement each other.
ROS provides a high-level Robot software environment (algorithms, visualization, planning).
MERIDIAN provides a low-latency real-time data loop between the robot’s MCU and the control system.
They serve different purposes but work well together.
| ROS | MERIDIAN | |
|---|---|---|
| Role | High-level Robot software platform | Real-time data framework between MCU and control system |
| Update cycle | Depends on configuration | Fixed 100 Hz |
| Relationship | Complementary, not competitive | Works as the real-time layer |
Reference ROS content:
https://maker.wiznet.io/mason/projects/w5500%2Dros2driver/
https://maker.wiznet.io/Benjamin/projects/cybergear-ros2-controller
5. Advantages of Ethernet in Robot Control
Robot control requires precise timing, stable data flow, and tight synchronization
between hardware and simulators.
In real-time control and digital-twin systems, performance depends heavily on
latency, jitter, and noise resistance.
For these reasons, wired Ethernet is often the best match for robot control frameworks.
Using MERIDIAN TWIN with W5500 Ethernet maximizes these benefits:
- Very stable and predictable timing
- Minimal jitter and packet loss
- Strong resistance to electrical noise
- Ideal for 100 Hz real-time loops
- Excellent for digital-twin synchronization
In short, W5500 + MERIDIAN TWIN creates a highly reliable, low-latency pipeline
for real-time robot control, simulation, and digital-twin systems.