
Experimental Nonlinear and Incremental Control Stabilization of a Tail-Sitter UAV with Hardware-in-t
This paper explores nonlinear control solutions for stabilizing a Tail-Sitter UAV using WIZnet's W5500 Ethernet module for real-time data communication.

WIZnet - W5500
x 1
Ethernet Module
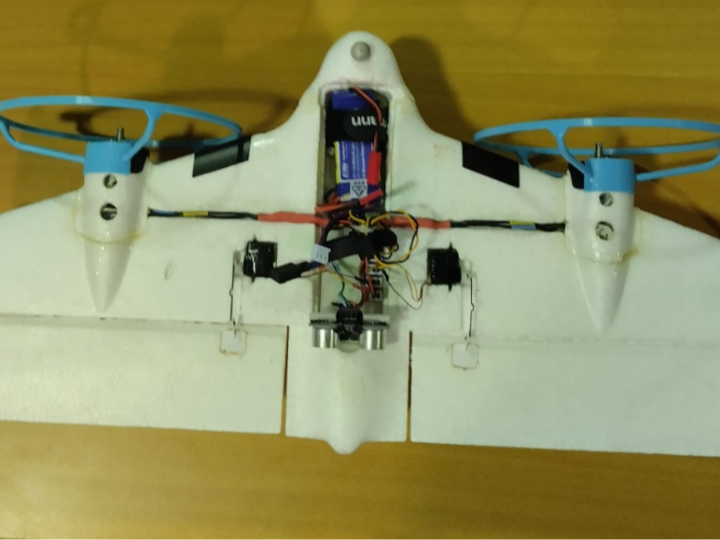
Tail-sitter UAVs, which combine the advantages of fixed-wing aircraft and rotorcraft, require robust stabilization strategies for hovering and vertical maneuvers. This study investigates different nonlinear control solutions: a literature-based strategy, Nonlinear Dynamic Inversion (NDI), and its incremental version (INDI). These controllers were implemented and tuned in simulation to stabilize a tail-sitter model, complemented by estimation methods for necessary variable feedback.
The controllers and estimators were then implemented on a microcontroller and validated in a Hardware-in-the-Loop (HITL) scenario. The experimental results validated the X-Vert model and compared the performance of different control solutions, with INDI showing robust control and accurate tracking capabilities with less actuator demand.
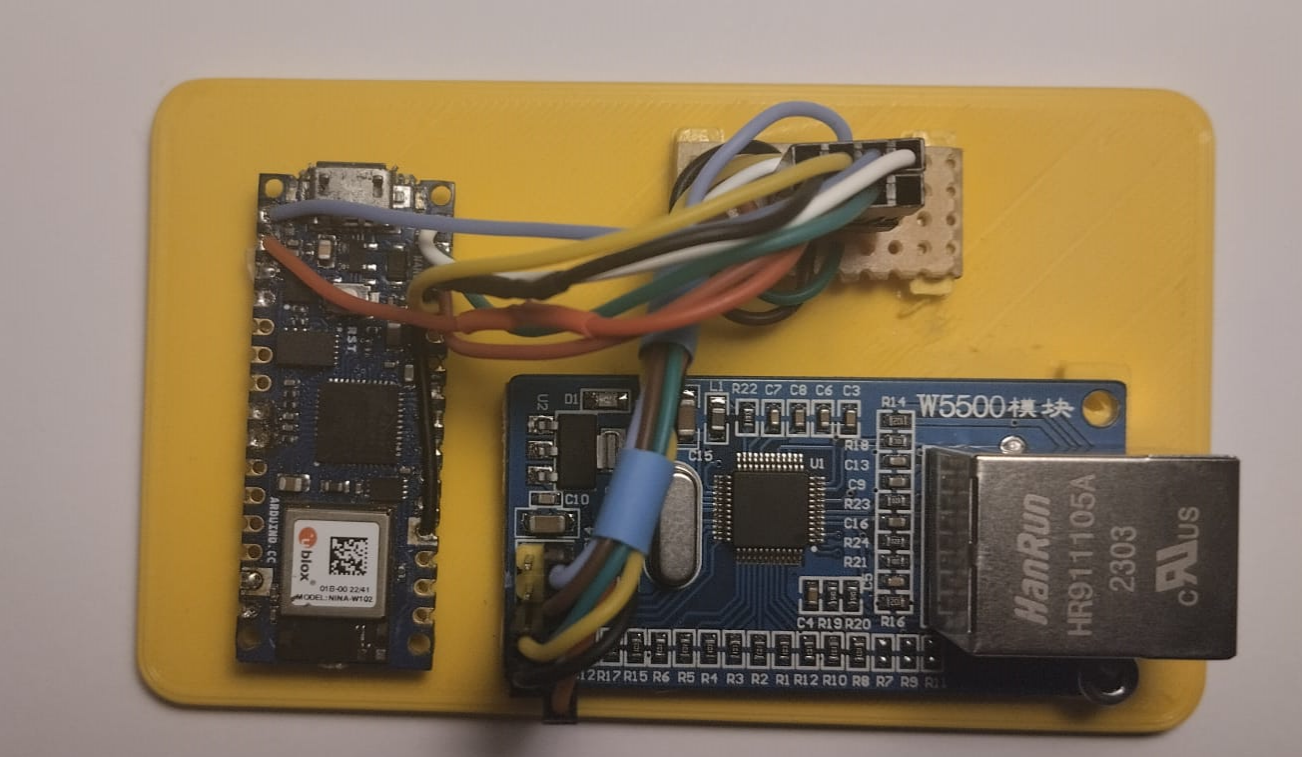
WIZnet's W5500 Ethernet module was used to enable real-time data communication between the Arduino Nano 33 IOT and MATLAB. The Ethernet module provided high-speed data transmission and stability, minimizing communication delays and ensuring accurate real-time control data exchange.
Hashtags: #UAV #VTOL #TailSitter #NonlinearControl #INDI #NDI #HITL #Stabilization #FlightControl #WIZnet #W5500
Categories: Unmanned Aerial Vehicle, Flight Control, Robotics, Nonlinear Control, Hardware-in-the-Loop Validation, Networking
Publish Date: March 16, 2024