
w5500-ros2driver
w5500-ros2driver

WIZnet - W5500
x 1
micropython - MicroPython
x 1
ROS2 개요
**ROS2(Robot Operating System 2)**는 로봇 애플리케이션 개발을 위한 오픈소스 프레임워크로, 다양한 센서 및 제어 모듈 간 통신을 효율적으로 수행할 수 있는 기반을 제공. ROS2는 DDS(Data Distribution Service)를 기반으로 한 Publish/Subscribe 통신 구조를 채택하고 있으며, 실시간성 강화, 멀티 플랫폼 지원, 향상된 QoS 정책 등을 통해 산업용 로봇 및 고성능 로봇 시스템에 적합한 환경을 조성.
DDS 기반 통신 구조를 통한 고신뢰 데이터 전달
실시간성 및 안정성 향상을 위한 다양한 QoS 정책 제공
Linux, Windows, macOS, 마이크로컨트롤러 등 폭넓은 플랫폼 지원
패키지 기반의 모듈형 구조로 확장성 우수
rviz, rqt, gazebo 등 시각화 및 시뮬레이션 도구와의 자연스러운 연동
이와 같은 특징은 실시간으로 변동되는 Force/Torque 센서 데이터를 처리해야 하는 로봇 시스템에 최적의 기반을 제공.
프로젝트 개요
프로젝트명: w5500-ros2driver
기반 칩셋: WIZnet W5500
목적: W5500 기반 Force Sensor 데이터를 ROS2 메시지로 변환 및 처리
적용 분야: 산업용 로봇, 매니퓰레이터, 자동화 장비, 멀티센서 기반 시스템, 로봇 실험 환경 등
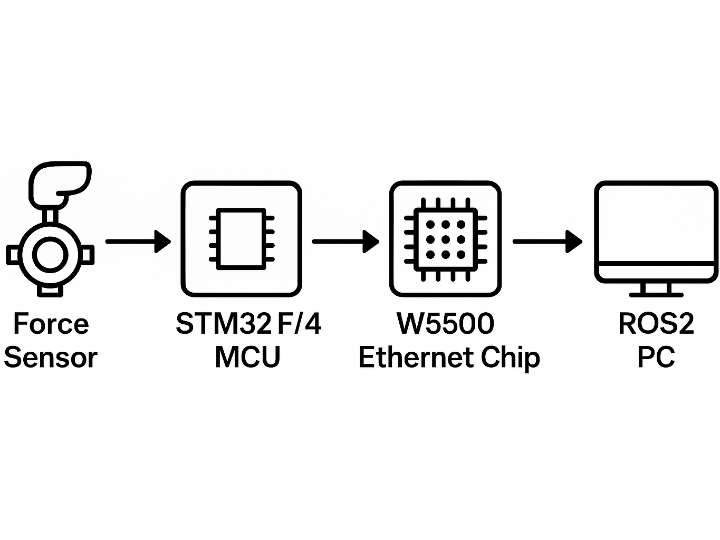
w5500-ros2driver는 WIZnet의 W5500 이더넷 칩을 기반으로 한 Force-Torque(FT) 센서 데이터를 ROS2 환경에서 안정적으로 수집·처리하기 위해 개발된 드라이버 패키지이다. 고정밀 센서 데이터를 네트워크 기반으로 전달해야 하는 로봇 및 자동화 시스템에서의 활용을 목적.
본 프로젝트는 W5500을 통해 수신되는 센서 데이터를 ROS2 환경에서 표준 메시지로 변환하고, 시각화·기록·분석 기능 등을 통합적으로 제공하는 패키지로 구성.
구성 요소 및 기능
1. Force Sensor 메시지 패키지: w5500_msg
ForceF3.msg
3축 Force/Torque 데이터를 포함하는 메시지.
ForceF4.msg
4채널 기반 Force 및 Moment 데이터를 포함
이 두 메시지 타입은 ROS2 내에서 센서 데이터를 구조적으로 표현하기 위해 설계되었다.
2. ROS2 드라이버 패키지: w5500_ros2driver
주요 모듈
w5500.py
W5500 기반 TCP/UDP 통신 처리
센서 데이터 패킷 수신 및 파싱
Mahony AHRS 필터 적용
NumPy 활용 고속 수치 처리
multi_force_viewer.py
다중 Force Sensor 데이터를 ROS2 환경에서 실시간으로 시각화
force_plotter.py
센서 값의 시간 변화 그래프 분석을 위한 모듈
bag_to_csv.py
ros2 bag 파일을 CSV 형식으로 변환
csv_gen.py
센서 데이터를 기반으로 CSV 파일 자동 생성
기술적 특징
1. W5500 기반 Ethernet 통신
W5500의 하드웨어 TCP/IP 오프로딩 기능을 활용하여 통신 지연을 최소화하고, 센서 데이터를 안정적인 주기로 수신할 수 있다. 이는 실시간성이 중요한 로봇 제어 환경에서 특히 유리한 특성이다.
2. Mahony AHRS 필터 적용
Force/Torque 데이터의 안정성을 높이기 위해 Mahony AHRS 필터를 적용할 수 있으며, 이를 통해 노이즈를 줄이고 센서 출력의 일관성을 확보 가능.
3. NumPy 및 SciPy 기반 수치 처리
본 프로젝트는 NumPy와 SciPy를 활용하여 고속 수치 처리 및 데이터 필터링 기능을 제공한다. 이러한 특성은 실시간 로봇 제어 및 물리적 상호작용 분석에 적합.
4. ROS2 생태계와의 완전한 통합
ROS2 Topic 기반 퍼블리싱 구조를 지원하며, rviz, rqt_plot 등 ROS2 시각화 도구와 자연스럽게 연동된다. 또한 멀티센서 구성에도 대응하여 산업용 환경에서도 높은 확장성을 보장.
활용 분야
산업용 로봇의 Force/Torque 기반 제어
자동화 장비의 접촉 감지 및 힘 조절
멀티센서 기반 힘 추정 연구
로봇 실험 데이터 기록 및 분석
이더넷 기반 원격 센서 시스템 구축
ROS2 Overview
ROS2 (Robot Operating System 2) is an open-source framework for robot application development that provides a foundation for efficient communication between various sensors and control modules. ROS2 adopts a publish/subscribe communication architecture based on DDS (Data Distribution Service), and, through enhanced real-time capability, multi-platform support, and improved QoS policies, it provides an environment well-suited for industrial robots and high-performance robotic systems.
Key characteristics include:
Highly reliable data delivery through a DDS-based communication architecture
Various QoS policies to enhance real-time performance and overall stability
Broad platform support, including Linux, Windows, macOS, and microcontrollers
Excellent scalability through a package-based modular architecture
Seamless integration with visualization and simulation tools such as rviz, rqt, and gazebo
These characteristics provide an optimal foundation for robotic systems that must process rapidly changing force/torque sensor data in real time.
Project Overview
Project name: w5500-ros2driver
Base chipset: WIZnet W5500
Purpose: Conversion and processing of W5500-based force sensor data into ROS2 messages
Application domains: Industrial robots, manipulators, automation equipment, multi-sensor based systems, and robotic experimental environments
w5500-ros2driver is a driver package developed to reliably acquire and process Force-Torque (FT) sensor data based on WIZnet’s W5500 Ethernet chip in a ROS2 environment. It is intended for use in robotic and automation systems that must transmit high-precision sensor data over a network.
This project is organized as a package that receives sensor data via W5500, converts it into standard messages within ROS2, and provides integrated functionality for visualization, logging, and analysis.
Components and Functions
1. Force Sensor Message Package: w5500_msg
ForceF3.msg
A message type that contains 3-axis force/torque data and provides.
ForceF4.msg
A message type that contains four-channel force and moment data and provides.
These two message types are designed to structurally represent sensor data within ROS2.
2. ROS2 Driver Package: w5500_ros2driver
Main Modules
w5500.py
Handles W5500-based TCP/UDP communication
Receives and parses sensor data packets
Applies the Mahony AHRS filter
Performs high-speed numerical processing using NumPy
multi_force_viewer.py
Provides real-time visualization of multiple force sensor data in a ROS2 environment
force_plotter.py
Module for analyzing time-series variations in sensor values via graphs
bag_to_csv.py
Converts ros2 bag files into CSV format
csv_gen.py
Automatically generates CSV files based on sensor data
Technical Characteristics
1. W5500-based Ethernet Communication
By utilizing the hardware TCP/IP offloading capabilities of the W5500, the system minimizes communication latency and can receive sensor data at a stable rate. This characteristic is particularly advantageous in robot control environments where real-time performance is critical.
2. Application of the Mahony AHRS Filter
The Mahony AHRS filter can be applied to improve the stability of force/torque data, thereby reducing noise and ensuring consistency in sensor output.
3. Numerical Processing Based on NumPy and SciPy
This project leverages NumPy and SciPy to provide high-speed numerical processing and data filtering capabilities. These features make the system suitable for real-time robot control and analysis of physical interactions.
4. Full Integration with the ROS2 Ecosystem
The project supports a ROS2 topic-based publishing structure and integrates naturally with ROS2 visualization tools such as rviz and rqt_plot. It also supports multi-sensor configurations, ensuring high scalability even in industrial environments.
Application Fields
Force/torque-based control of industrial robots
Contact detection and force regulation in automation equipment
Multi-sensor-based force estimation research
Recording and analysis of experimental robot data
Construction of Ethernet-based remote sensor systems
-
Github Code
