
Radar Based Surveillance with Ethernet Integration
We receive detection info from radar.
COMPONENTS
Hardware components


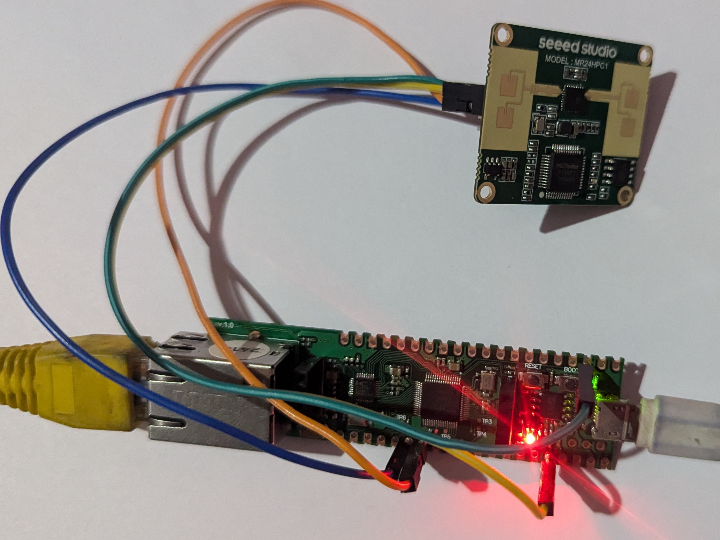
WIZnet - W7500
x 1
Seeed studio - 24GHz mmWave Sensor
x 1
PROJECT DESCRIPTION
Introduction :
The seeed studio 24GHz mmWave Sensor is used in this project. It can use UART to send sensor data. But also as per the documentation.
- The human presence status output interface. You can use the level of these two pins to determine the current human movement in the environment. S1 output: high level - occupied, low level - unoccupied. S2 output: high level - active, low level - stationary.
So I am using GPIO read to read the status of the pins and publish on the webserver. I am using webserver example and inserting GPIO read and write functionality.
/**
******************************************************************************
* @file WZTOE/WZTOE_WebServer/main.c
* @author WIZnet
* @brief Main program body
******************************************************************************
* @attention
*
* <h2><center>© COPYRIGHT 2018 WIZnet</center></h2>
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
* SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
* INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
* CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF
* THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "wizchip_conf.h"
#include "dhcp.h"
#include <string.h>
/** @addtogroup W7500x_StdPeriph_Examples
* @{
*/
/** @addtogroup WZTOE_WebServer
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
#define DATA_BUF_SIZE 2048
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
static __IO uint32_t TimingDelay;
uint8_t test_buf[DATA_BUF_SIZE];
wiz_NetInfo gWIZNETINFO;
uint8_t status_buf[2];
/* Private function prototypes -----------------------------------------------*/
static void UART_Config(void);
static void GPIO_Config(void);
static void DUALTIMER_Config(void);
static void Network_Config(void);
void dhcp_assign(void);
void dhcp_update(void);
void dhcp_conflict(void);
int32_t WebServer(uint8_t sn, uint8_t* buf, uint16_t port);
void delay(__IO uint32_t milliseconds);
void TimingDelay_Decrement(void);
/* Private functions ---------------------------------------------------------*/
/**
* @brief Main program.
* @param None
* @retval None
*/
int main(void)
{
uint32_t ret;
uint8_t dhcp_retry = 0;
SystemInit();
/* SysTick_Config */
SysTick_Config((GetSystemClock() / 1000));
/* Set WZ_100US Register */
setTIC100US((GetSystemClock() / 10000));
UART_Config();
GPIO_Config();
DUALTIMER_Config();
printf("W7500x Standard Peripheral Library version : %d.%d.%d\r\n", __W7500X_STDPERIPH_VERSION_MAIN, __W7500X_STDPERIPH_VERSION_SUB1, __W7500X_STDPERIPH_VERSION_SUB2);
printf("SourceClock : %d\r\n", (int) GetSourceClock());
printf("SystemClock : %d\r\n", (int) GetSystemClock());
/* Initialize PHY */
#ifdef W7500
printf("PHY Init : %s\r\n", PHY_Init(GPIOB, GPIO_Pin_15, GPIO_Pin_14) == SET ? "Success" : "Fail");
#elif defined (W7500P)
printf("PHY Init : %s\r\n", PHY_Init(GPIOB, GPIO_Pin_14, GPIO_Pin_15) == SET ? "Success" : "Fail");
#endif
/* Check Link */
printf("Link : %s\r\n", PHY_GetLinkStatus() == PHY_LINK_ON ? "On" : "Off");
/* Network information setting before DHCP operation. Set only MAC. */
Network_Config();
/* DHCP Process */
DHCP_init(0, test_buf);
reg_dhcp_cbfunc(dhcp_assign, dhcp_update, dhcp_conflict);
if (gWIZNETINFO.dhcp == NETINFO_DHCP) { // DHCP
printf("Start DHCP\r\n");
while (1) {
ret = DHCP_run();
if (ret == DHCP_IP_LEASED) {
printf("DHCP Success\r\n");
break;
}
else if (ret == DHCP_FAILED) {
dhcp_retry++;
}
if (dhcp_retry > 3) {
printf("DHCP Fail\r\n");
break;
}
}
}
/* Network information setting after DHCP operation.
* Displays the network information allocated by DHCP. */
Network_Config();
printf("System Loop StartBY1\r\n");
while (1) {
status_buf[0]=GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4);
status_buf[1]=GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5);
WebServer(1, test_buf, 80);
}
return 0;
}
/**
* @brief Configures the UART Peripheral.
* @note
* @param None
* @retval None
*/
static void UART_Config(void)
{
UART_InitTypeDef UART_InitStructure;
UART_StructInit(&UART_InitStructure);
#if defined (USE_WIZWIKI_W7500_EVAL)
UART_Init(UART1, &UART_InitStructure);
UART_Cmd(UART1, ENABLE);
#else
S_UART_Init(115200);
S_UART_Cmd(ENABLE);
#endif
}
/**
* @brief Configures the GPIO Peripheral.
* @note GPIO pin configures for ADC
* @param None
* @retval None
*/
static void GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_4 | GPIO_Pin_5;
GPIO_InitStructure.GPIO_Direction = GPIO_Direction_IN;
GPIO_InitStructure.GPIO_Pad = GPIO_Pad_Default;
GPIO_InitStructure.GPIO_AF = PAD_AF0;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_InitStructure.GPIO_Direction = GPIO_Direction_OUT;
GPIO_InitStructure.GPIO_AF = PAD_AF1;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
/**
* @brief Configures the DUALTIMER Peripheral.
* @note
* @param None
* @retval None
*/
static void DUALTIMER_Config(void)
{
DUALTIMER_InitTypDef DUALTIMER_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
DUALTIMER_InitStructure.Timer_Load = GetSystemClock() / 1; //1s
DUALTIMER_InitStructure.Timer_Prescaler = DUALTIMER_Prescaler_1;
DUALTIMER_InitStructure.Timer_Wrapping = DUALTIMER_Periodic;
DUALTIMER_InitStructure.Timer_Repetition = DUALTIMER_Wrapping;
DUALTIMER_InitStructure.Timer_Size = DUALTIMER_Size_32;
DUALTIMER_Init(DUALTIMER0_0, &DUALTIMER_InitStructure);
DUALTIMER_ITConfig(DUALTIMER0_0, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = DUALTIMER0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0x0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DUALTIMER_Cmd(DUALTIMER0_0, ENABLE);
}
/**
* @brief Configures the Network Information.
* @note
* @param None
* @retval None
*/
static void Network_Config(void)
{
uint8_t mac_addr[6] = { 0x00, 0x08, 0xDC, 0x01, 0x02, 0x03 };
memcpy(gWIZNETINFO.mac, mac_addr, 6);
gWIZNETINFO.dhcp = NETINFO_DHCP;
ctlnetwork(CN_SET_NETINFO, (void*) &gWIZNETINFO);
printf("MAC: %02X:%02X:%02X:%02X:%02X:%02X\r\n", gWIZNETINFO.mac[0], gWIZNETINFO.mac[1], gWIZNETINFO.mac[2], gWIZNETINFO.mac[3], gWIZNETINFO.mac[4], gWIZNETINFO.mac[5]);
printf("IP: %d.%d.%d.%d\r\n", gWIZNETINFO.ip[0], gWIZNETINFO.ip[1], gWIZNETINFO.ip[2], gWIZNETINFO.ip[3]);
printf("GW: %d.%d.%d.%d\r\n", gWIZNETINFO.gw[0], gWIZNETINFO.gw[1], gWIZNETINFO.gw[2], gWIZNETINFO.gw[3]);
printf("SN: %d.%d.%d.%d\r\n", gWIZNETINFO.sn[0], gWIZNETINFO.sn[1], gWIZNETINFO.sn[2], gWIZNETINFO.sn[3]);
printf("DNS: %d.%d.%d.%d\r\n", gWIZNETINFO.dns[0], gWIZNETINFO.dns[1], gWIZNETINFO.dns[2], gWIZNETINFO.dns[3]);
}
/**
* @brief The call back function of ip assign.
* @note
* @param None
* @retval None
*/
void dhcp_assign(void)
{
getIPfromDHCP(gWIZNETINFO.ip);
getGWfromDHCP(gWIZNETINFO.gw);
getSNfromDHCP(gWIZNETINFO.sn);
getDNSfromDHCP(gWIZNETINFO.dns);
ctlnetwork(CN_SET_NETINFO, (void*) &gWIZNETINFO);
}
/**
* @brief The call back function of ip update.
* @note
* @param None
* @retval None
*/
void dhcp_update(void)
{
;
}
/**
* @brief The call back function of ip conflict.
* @note
* @param None
* @retval None
*/
void dhcp_conflict(void)
{
;
}
/**
* @brief WebServer example function.
* @note
* @param sn: Socket number to use.
* @param buf: The buffer the socket will use.
* @param port: Socket port number to use.
* @retval Success or Fail of configuration functions
*/
int32_t WebServer(uint8_t sn, uint8_t* buf, uint16_t port)
{
uint8_t i;
uint8_t adcChannelOffset = 2;
int32_t ret;
uint16_t size = 0;
uint8_t destip[4];
uint16_t destport;
uint8_t adc_buf[128] = { '\0', };
switch (getSn_SR(sn))
{
case SOCK_ESTABLISHED:
if (getSn_IR(sn) & Sn_IR_CON) {
getSn_DIPR(sn, destip);
destport = getSn_DPORT(sn);
printf("%d:Connected - %d.%d.%d.%d : %d\r\n", sn, destip[0], destip[1], destip[2], destip[3], destport);
setSn_IR(sn, Sn_IR_CON);
}
if ((size = getSn_RX_RSR(sn)) > 0) {
if (size > DATA_BUF_SIZE) size = DATA_BUF_SIZE;
ret = recv(sn, buf, size);
if (ret <= 0) return ret;
printf("%s", buf);
ret = send(sn, "HTTP/1.1 200 OK\r\n"
"Content-Type: text/html\r\n"
"Connection: close\r\n"
"Refresh: 5\r\n"
"\r\n"
"<!DOCTYPE HTML>\r\n"
"<html>\r\n", sizeof("HTTP/1.1 200 OK\r\n"
"Content-Type: text/html\r\n"
"Connection: close\r\n"
"Refresh: 5\r\n"
"\r\n"
"<!DOCTYPE HTML>\r\n"
"<html>\r\n") - 1);
if (ret < 0) {
close(sn);
return ret;
}
for (i = 0; i < 2; i++) {
ADC_Cmd(ENABLE);
if(i >= 2) adcChannelOffset = 4;
else if (i < 2) adcChannelOffset = 2;
ADC_ChannelConfig(i+adcChannelOffset);
ADC_StartOfConversion();
//sprintf(adc_buf, "analog input %d is %d<br />\r\n", i+adcChannelOffset, ADC_GetConversionValue());
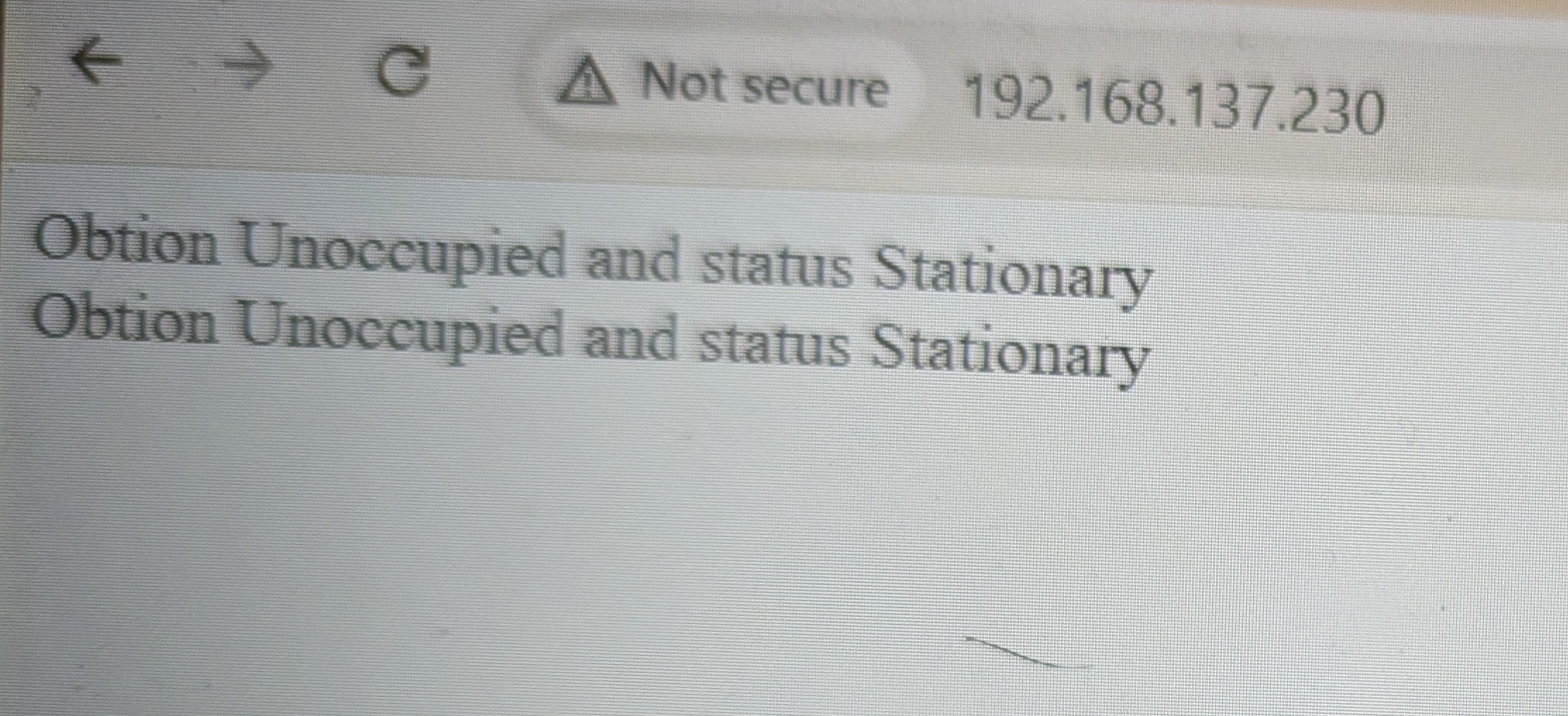
sprintf(adc_buf, "Obtion %s and status %s<br />\r\n",status_buf[0]==1?"Occupied":"Unoccupied", status_buf[1]==1?"Moving":"Stationary");
ret = send(sn, adc_buf, strlen(adc_buf));
if (ret < 0) {
close(sn);
return ret;
}
ADC_Cmd(DISABLE);
memset(adc_buf, '\0', 128);
}
ret = send(sn, "</html>\r\n", sizeof("</html>\r\n") - 1);
if (ret < 0) {
close(sn);
return ret;
}
disconnect(sn);
}
break;
case SOCK_CLOSE_WAIT:
if ((ret = disconnect(sn)) != SOCK_OK) return ret;
printf("%d:Socket Closed\r\n", sn);
break;
case SOCK_INIT:
printf("%d:Listen, Web server, port [%d]\r\n", sn, port);
if ((ret = listen(sn)) != SOCK_OK) return ret;
break;
case SOCK_CLOSED:
if ((ret = socket(sn, Sn_MR_TCP, port, 0x00)) != sn) return ret;
break;
default:
break;
}
return 1;
}
/**
* @brief Inserts a delay time.
* @param nTime: specifies the delay time length, in milliseconds.
* @retval None
*/
void delay(__IO uint32_t milliseconds)
{
TimingDelay = milliseconds;
while (TimingDelay != 0)
;
}
/**
* @brief Decrements the TimingDelay variable.
* @param None
* @retval None
*/
void TimingDelay_Decrement(void)
{
if (TimingDelay != 0x00) {
TimingDelay--;
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
/**
* @}
*/
/**
* @}
*/
/******************** (C) COPYRIGHT WIZnet *****END OF FILE********************/
The output is visible on the local webserver. Further this data need to send to web.
Documents
Comments
Write