
ESP32 + W5500 EtherCAT-WiFi Hybrid Control System
로봇 암 제어로 확인한 실시간 Ethernet과 무선 모니터링의 결합

WIZnet - W5500
x 1

Espressif - ESP32
x 1
ESP32 + W5500 기반 EtherCAT-WiFi Hybrid Networking 로봇 제어 시스템
🧾 Summary
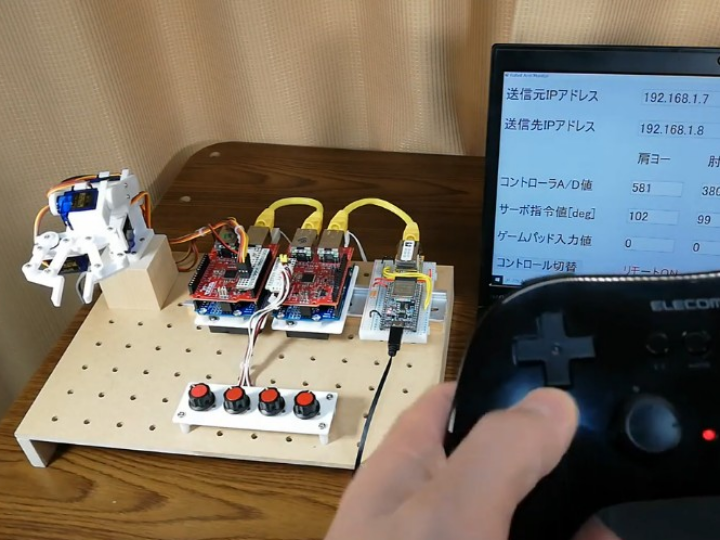
ESP32와 W5500을 활용하여 EtherCAT 마스터 기반 실시간 제어 시스템을 구현하고, 동시에 ESP32의 Wi-Fi를 통해 UDP/IP 통신 및 모니터링을 수행하는 Hybrid Networking 데모입니다.
Ethernet은 실시간 제어, Wi-Fi는 데이터 통신을 담당하는 구조로, 산업용 IoT 및 로봇 제어에 적합한 아키텍처를 보여줍니다.
🎥 Demo Video
📌 Overview
이 프로젝트는 ESP32와 W5500을 결합하여 단순 IoT를 넘어
👉 실시간 산업용 네트워크(EtherCAT) + 무선 통신을 동시에 구현한 사례입니다.
특히 다음 구조가 핵심입니다:
- Ethernet → EtherCAT 기반 실시간 제어
- Wi-Fi → PC 연동 및 모니터링
👉 하나의 MCU에서 제어 네트워크 + 데이터 네트워크를 동시에 처리
🧩 System Architecture
🔹 Master
- ESP32 + W5500 (Ethernet)
🔹 Slave
- Arduino Uno + EasyCAT Shield
🔹 Additional
- ESP32 Wi-Fi → PC (UDP/IP 통신)
⚙️ Key Features
1. EtherCAT Master 구현
- ESP32 + W5500이 Master 역할 수행
- Slave 디바이스 제어
- 실시간 데이터 교환
👉 산업용 실시간 Ethernet 적용
2. 로봇 암 제어
- EtherCAT 기반 제어
- 실시간 피드백 처리
👉 Industrial Automation 수준 구현
3. Hybrid Networking 구조
- Ethernet → 실시간 제어
- Wi-Fi → 데이터 통신
👉 역할 분리된 네트워크 설계
💡 Technical Highlights
✅ W5500 Ethernet Controller
- 안정적인 유선 통신
- 산업 환경 적합
✅ TOE (TCP/IP Offload Engine)
- Hardware TCP/IP Stack 내장
- MCU 부하 감소
- 네트워크 처리 안정성 향상
✅ Hybrid Networking
- ESP32 Wi-Fi + W5500 Ethernet 결합
- 안정성과 유연성 동시 확보
🌐 Why This Matters
이 프로젝트는 다음을 보여줍니다:
✔ ESP32의 확장성 (IoT → 산업 제어)
✔ W5500 기반 Ethernet의 안정성
✔ Hybrid Networking 구조의 실용성
👉 단순 연결이 아닌 시스템 설계 관점의 프로젝트
✅ TOE 사용 여부
✔ Yes
(W5500 Hardware TCP/IP Offload Engine 기반)
👉 Hybrid Networking (ESP × Hardwired Ethernet)
👉 Industrial IoT / EtherCAT / Real-time Control
🏁 Conclusion
이 프로젝트는 단순한 IoT 데모를 넘어
👉 Hybrid Networking 기반 산업용 제어 시스템의 가능성을 보여줍니다.
특히
- Ethernet (안정성)
- Wi-Fi (유연성)
을 결합한 구조는
👉 향후 IoT 및 자동화 시스템의 핵심 설계 방향을 잘 보여주는 사례입니다.
ESP32 + W5500 EtherCAT-WiFi Hybrid Networking Robot Control System
🧾 Summary
This project demonstrates a real-time EtherCAT master system using ESP32 + W5500, combined with Wi-Fi-based UDP/IP communication for monitoring.
Ethernet handles deterministic control, while Wi-Fi enables flexible communication, forming a Hybrid Networking architecture suitable for Industrial IoT and robotics.
🎥 Demo Video
https://www.youtube.com/watch?v=E-bh-TJOit4
📌 Overview
This project goes beyond basic IoT connectivity and showcases:
👉 Real-time industrial Ethernet (EtherCAT) + wireless communication in a single system
Key idea:
- Ethernet → control
- Wi-Fi → data
🧩 System Architecture
🔹 Master
- ESP32 + W5500
🔹 Slave
- Arduino Uno + EasyCAT Shield
🔹 Additional
- ESP32 Wi-Fi → PC (UDP/IP)
⚙️ Key Features
1. EtherCAT Master
- ESP32 + W5500 acts as master
- Controls slave devices
- Real-time communication
2. Robot Control
- Real-time robotic arm operation
- Feedback loop
3. Hybrid Networking
- Ethernet → control
- Wi-Fi → monitoring
👉 Role-separated network design
💡 Technical Highlights
✅ W5500 Ethernet
- Reliable wired communication
- Industrial-grade stability
✅ TOE (TCP/IP Offload Engine)
- Hardware TCP/IP stack
- Reduced MCU workload
- Improved performance
✅ Hybrid Networking
- Combines Wi-Fi + Ethernet
- Stability + flexibility
✅ TOE Usage
✔ Yes (W5500 hardware TCP/IP offload)
⭐ Bonus Keywords
👉 Hybrid Networking (ESP × Hardwired Ethernet)
👉 Industrial IoT / EtherCAT / Real-time Control
🏁 Conclusion
This project represents:
👉 A transition from basic IoT to industrial control systems
By combining:
- Ethernet (stability)
- Wi-Fi (flexibility)
It provides a strong reference for future IoT and automation designs.