
ESP32 + W5500 EtherCAT-WiFi Hybrid Control System
로봇 암 제어로 확인한 실시간 Ethernet과 무선 모니터링의 결합

WIZnet - W5500
x 1

Espressif - ESP32
x 1
ESP32 + W5500 기반 EtherCAT-WiFi Hybrid Networking 로봇 제어 시스템
🧾 Summary
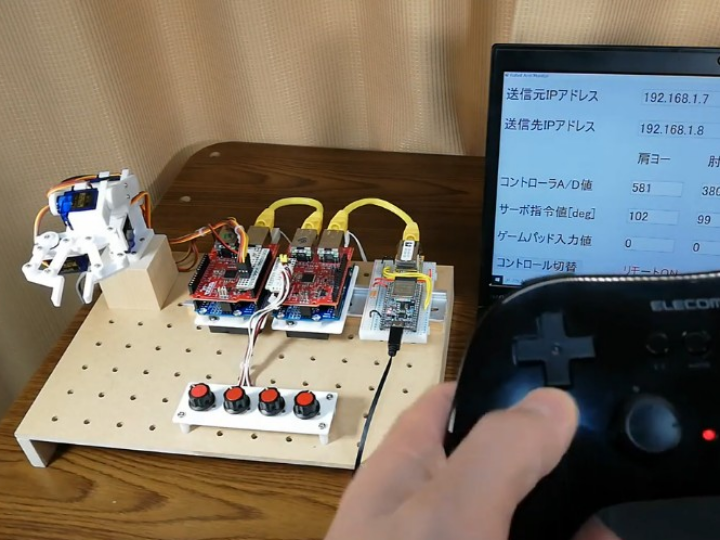
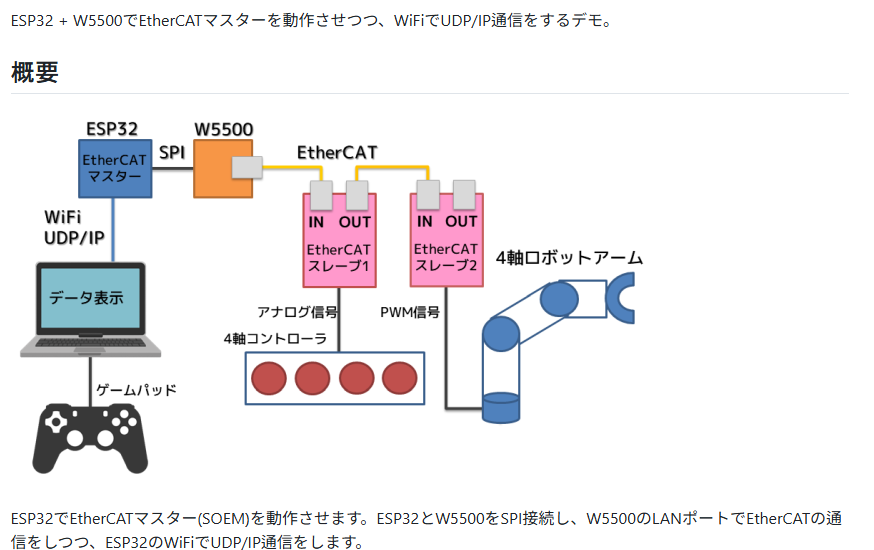
ESP32와 W5500을 활용하여 EtherCAT 마스터 기반 실시간 제어 시스템을 구현하고, 동시에 ESP32의 Wi-Fi를 통해 UDP/IP 통신 및 모니터링을 수행하는 Hybrid Networking 데모입니다.
Ethernet은 실시간 제어, Wi-Fi는 데이터 통신을 담당하는 구조로, 산업용 IoT 및 로봇 제어에 적합한 아키텍처를 보여줍니다.
🎥 Demo Video
📌 Overview
이 프로젝트는 ESP32와 W5500을 결합하여 단순 IoT를 넘어
👉 실시간 산업용 네트워크(EtherCAT) + 무선 통신을 동시에 구현한 사례입니다.
특히 다음 구조가 핵심입니다:
- Ethernet → EtherCAT 기반 실시간 제어
- Wi-Fi → PC 연동 및 모니터링
👉 하나의 MCU에서 제어 네트워크 + 데이터 네트워크를 동시에 처리
구조를 보면, Master는 ESP32 + W5500, Slave는 Arduino Uno + EasyCAT Shield, 그리고 추가적으로 ESP32 Wi-Fi가 PC와 UDP/IP로 연결됩니다. 즉, 하나의 MCU 시스템에서 “실시간 제어망”과 “일반 데이터망”을 동시에 운용하는 구조입니다.
기술적으로 중요한 포인트는 역할 분리입니다.
일반적으로 무선 네트워크는 편하지만 지연과 변동성이 있고, 산업 제어는 타이밍 예측 가능성이 중요합니다. 이 프로젝트는 그 점을 반영해서 Ethernet은 제어, Wi-Fi는 모니터링으로 역할을 나눴습니다. 문서도 이를 “Ethernet → control, Wi-Fi → monitoring/data” 구조라고 직접 설명합니다.
ESP32는 전체 시스템의 중앙 제어기 역할을 합니다.
여기서 ESP32는 두 개의 네트워크 인터페이스를 사실상 동시에 다룹니다.
- W5500을 통해 유선 Ethernet 경로를 확보
- 내장 Wi-Fi를 통해 무선 통신 경로를 유지
즉, ESP32는 애플리케이션 로직과 제어 판단을 수행하고, W5500은 유선 네트워크 인터페이스 역할을 맡아 더 안정적인 Ethernet 통신 기반을 제공합니다. 문서에서도 W5500의 장점으로 안정적인 유선 통신, 산업 환경 적합성, Hardware TCP/IP Offload Engine을 강조합니다.
🧩 System Architecture
🔹 Master
- ESP32 + W5500 (Ethernet)
🔹 Slave
- Arduino Uno + EasyCAT Shield
🔹 Additional
- ESP32 Wi-Fi → PC (UDP/IP 통신)
⚙️ Key Features
1. EtherCAT Master 구현
- ESP32 + W5500이 Master 역할 수행
- Slave 디바이스 제어
- 실시간 데이터 교환
👉 산업용 실시간 Ethernet 적용
2. 로봇 암 제어
- EtherCAT 기반 제어
- 실시간 피드백 처리
👉 Industrial Automation 수준 구현
3. Hybrid Networking 구조
- Ethernet → 실시간 제어
- Wi-Fi → 데이터 통신
👉 역할 분리된 네트워크 설계
💡 Technical Highlights
✅ W5500 Ethernet Controller
- 안정적인 유선 통신
- 산업 환경 적합
✅ TOE (TCP/IP Offload Engine)
- Hardware TCP/IP Stack 내장
- MCU 부하 감소
- 네트워크 처리 안정성 향상
✅ Hybrid Networking
- ESP32 Wi-Fi + W5500 Ethernet 결합
- 안정성과 유연성 동시 확보
🌐 Why This Matters
이 프로젝트는 다음을 보여줍니다:
✔ ESP32의 확장성 (IoT → 산업 제어)
✔ W5500 기반 Ethernet의 안정성
✔ Hybrid Networking 구조의 실용성
👉 단순 연결이 아닌 시스템 설계 관점의 프로젝트
✅ TOE 사용 여부
✔ Yes
(W5500 Hardware TCP/IP Offload Engine 기반)
👉 Hybrid Networking (ESP × Hardwired Ethernet)
👉 Industrial IoT / EtherCAT / Real-time Control
🏁 Conclusion
이 프로젝트는 단순한 IoT 데모를 넘어
👉 Hybrid Networking 기반 산업용 제어 시스템의 가능성을 보여줍니다.
특히
- Ethernet (안정성)
- Wi-Fi (유연성)
을 결합한 구조는
👉 향후 IoT 및 자동화 시스템의 핵심 설계 방향을 잘 보여주는 사례입니다.
FAQ
1. 이 프로젝트는 한마디로 무엇인가요?
이 프로젝트는 ESP32와 W5500을 활용해 유선 Ethernet과 무선 Wi-Fi를 동시에 사용하는 하이브리드 네트워크 기반 로봇 제어 시스템입니다.
Ethernet은 실시간 제어, Wi-Fi는 모니터링 및 데이터 통신을 담당합니다.
2. 왜 Wi-Fi만 쓰지 않고 W5500 Ethernet을 함께 사용했나요?
Wi-Fi는 설치와 연결이 편리하지만, 지연시간 변동이 있을 수 있습니다.
반면 Ethernet은 안정적이고 예측 가능한 통신이 가능하기 때문에, 실시간 제어나 산업용 제어에 더 적합합니다.
그래서 이 프로젝트는 제어는 Ethernet, 모니터링은 Wi-Fi로 역할을 분리했습니다.
3. W5500의 역할은 정확히 무엇인가요?
W5500은 ESP32에 유선 Ethernet 기능을 제공하는 컨트롤러입니다.
이를 통해 ESP32는 Wi-Fi뿐 아니라 안정적인 유선 네트워크도 동시에 사용할 수 있습니다.
즉, 이 프로젝트에서 W5500은 실시간 제어용 통신 경로를 담당하는 핵심 부품입니다.
4. TOE(TCP/IP Offload Engine)는 무엇이고 왜 중요한가요?
TOE는 TCP/IP 네트워크 처리 일부를 하드웨어가 대신 수행하는 기능입니다.
이 기능 덕분에 MCU가 네트워크 처리에 쓰는 부담이 줄어들고, 전체 시스템이 더 안정적으로 동작할 수 있습니다.
즉, MCU는 제어 로직에 더 집중하고, 네트워크 처리는 W5500이 효율적으로 보조하는 구조입니다.
5. EtherCAT은 왜 사용했나요?
EtherCAT은 실시간 제어에 적합한 산업용 Ethernet 통신 방식입니다.
로봇 제어처럼 타이밍이 중요한 시스템에서는 일반적인 네트워크보다 더 빠르고 예측 가능한 데이터 교환이 중요하기 때문에 적합합니다.
이 프로젝트는 이를 통해 산업 자동화 수준의 제어 구조를 보여줍니다.
6. Master와 Slave는 각각 무엇인가요?
- Master: ESP32 + W5500
- Slave: Arduino Uno + EasyCAT Shield
Master는 전체 제어를 담당하고, Slave는 명령을 받아 동작합니다.
즉, 이 프로젝트는 단순 통신 테스트가 아니라 실제 제어 시스템 구조를 구현한 예제입니다.
7. 이 프로젝트가 단순 IoT 데모와 다른 점은 무엇인가요?
일반적인 IoT 데모는 센서 연결이나 데이터 전송 중심인 경우가 많습니다.
반면 이 프로젝트는 실시간 제어망과 데이터망을 분리하고, 산업용 네트워크 구조를 구현했다는 점에서 차별화됩니다.
즉, 단순 연결이 아니라 시스템 설계 관점의 프로젝트입니다.
8. Wi-Fi는 이 프로젝트에서 어떤 역할을 하나요?
Wi-Fi는 PC와의 UDP/IP 통신, 상태 확인, 모니터링 같은 비실시간 데이터 통신을 담당합니다.
즉, 제어는 Ethernet으로 안정적으로 수행하고, Wi-Fi는 사용자 편의성과 유연성을 높이는 역할을 합니다.
9. 이 구조의 가장 큰 장점은 무엇인가요?
가장 큰 장점은 안정성과 유연성을 동시에 확보할 수 있다는 점입니다.
- Ethernet → 안정성, 실시간성
- Wi-Fi → 편의성, 확장성
즉, 산업용 제어에 필요한 신뢰성과 IoT 시스템의 연결성을 함께 가져갈 수 있습니다.
10. 이 프로젝트는 어떤 분야에 활용될 수 있나요?
이 구조는 다음과 같은 분야에 적용 가능성이 있습니다.
- 로봇 제어
- 산업 자동화
- 스마트 팩토리
- Industrial IoT
- 실시간 모니터링 시스템
즉, 단순 메이커 프로젝트를 넘어 실제 산업 응용 가능성을 보여주는 사례입니다.
11. 왜 이 프로젝트가 중요한가요?
이 프로젝트는 ESP32가 단순 Wi-Fi MCU를 넘어,
W5500과 결합해 산업용 네트워크 제어 시스템까지 확장될 수 있다는 점을 보여줍니다.
또한 W5500의 가치를 단순 Ethernet 연결이 아닌,
안정적인 시스템 설계 요소로 보여준다는 점에서 의미가 큽니다.
12. 발표에서 가장 강조해야 할 핵심 메시지는 무엇인가요?
가장 중요한 메시지는 이것입니다.
“이 프로젝트는 ESP32와 W5500을 결합해, 안정적인 실시간 제어와 유연한 무선 모니터링을 동시에 구현한 하이브리드 산업용 네트워크 사례입니다.”
ESP32 + W5500 EtherCAT-WiFi Hybrid Networking Robot Control System
🧾 Summary
This project demonstrates a real-time EtherCAT master system using ESP32 + W5500, combined with Wi-Fi-based UDP/IP communication for monitoring.
Ethernet handles deterministic control, while Wi-Fi enables flexible communication, forming a Hybrid Networking architecture suitable for Industrial IoT and robotics.
🎥 Demo Video
https://www.youtube.com/watch?v=E-bh-TJOit4
📌 Overview
This project goes beyond basic IoT connectivity and showcases:
👉 Real-time industrial Ethernet (EtherCAT) + wireless communication in a single system
Key idea:
- Ethernet → control
- Wi-Fi → data
🧩 System Architecture
🔹 Master
- ESP32 + W5500
🔹 Slave
- Arduino Uno + EasyCAT Shield
🔹 Additional
- ESP32 Wi-Fi → PC (UDP/IP)
⚙️ Key Features
1. EtherCAT Master
- ESP32 + W5500 acts as master
- Controls slave devices
- Real-time communication
2. Robot Control
- Real-time robotic arm operation
- Feedback loop
3. Hybrid Networking
- Ethernet → control
- Wi-Fi → monitoring
👉 Role-separated network design
💡 Technical Highlights
✅ W5500 Ethernet
- Reliable wired communication
- Industrial-grade stability
✅ TOE (TCP/IP Offload Engine)
- Hardware TCP/IP stack
- Reduced MCU workload
- Improved performance
✅ Hybrid Networking
- Combines Wi-Fi + Ethernet
- Stability + flexibility
✅ TOE Usage
✔ Yes (W5500 hardware TCP/IP offload)
⭐ Bonus Keywords
👉 Hybrid Networking (ESP × Hardwired Ethernet)
👉 Industrial IoT / EtherCAT / Real-time Control
🏁 Conclusion
This project represents:
👉 A transition from basic IoT to industrial control systems
By combining:
- Ethernet (stability)
- Wi-Fi (flexibility)
It provides a strong reference for future IoT and automation designs.
❓ FAQ
1. What is this project about?
This project demonstrates a hybrid networking-based robot control system using ESP32 and W5500.
It combines wired Ethernet for real-time control and Wi-Fi for monitoring and data communication.
2. Why use Ethernet (W5500) instead of only Wi-Fi?
Wi-Fi is flexible but may have latency variations and instability.
Ethernet provides stable and deterministic communication, which is essential for real-time control.
Therefore, this project separates roles:
- Ethernet → control
- Wi-Fi → monitoring
3. What is the role of W5500 in this system?
W5500 is an Ethernet controller that enables ESP32 to use wired networking.
It provides a reliable communication channel for real-time control.
In this project, W5500 is a key component for stable industrial communication.
4. What is TOE (TCP/IP Offload Engine) and why is it important?
TOE means that TCP/IP processing is handled by hardware instead of the MCU.
This reduces the workload of the ESP32 and improves overall system stability.
In short, W5500 handles networking efficiently while ESP32 focuses on control logic.
5. Why is EtherCAT used in this project?
EtherCAT is an industrial Ethernet protocol designed for real-time control.
It enables fast and deterministic data exchange, which is critical for applications like robotics.
This makes it suitable for industrial automation systems.
6. What are Master and Slave in this system?
- Master: ESP32 + W5500
- Slave: Arduino Uno + EasyCAT Shield
The Master controls the system and communicates with Slave devices.
This setup reflects a real industrial control architecture, not just a simple demo.
7. How is this different from a typical IoT project?
Typical IoT projects focus on sensors and data transmission.
This project goes further by implementing:
- Real-time control network (Ethernet)
- Data/monitoring network (Wi-Fi)
It represents a system-level design, not just connectivity.
8. What is the role of Wi-Fi in this system?
Wi-Fi is used for monitoring, PC communication, and UDP/IP data transfer.
It handles non-critical data, improving usability and flexibility.
9. What is the main advantage of this architecture?
The biggest advantage is achieving both:
- Stability (Ethernet)
- Flexibility (Wi-Fi)
This hybrid approach allows the system to meet both industrial and IoT requirements.
10. What applications can this system be used for?
This architecture can be applied to:
- Robotics
- Industrial automation
- Smart factories
- Industrial IoT systems
- Real-time monitoring systems
11. Why is this project important?
This project shows that ESP32 can go beyond simple IoT and be extended to industrial control systems when combined with W5500.
It also highlights that W5500 is not just a connectivity component, but a key element in system design for reliability.
12. What is the key takeaway?
This project demonstrates how ESP32 and W5500 can be combined to build a hybrid industrial network that achieves both real-time control and flexible monitoring.