
FlexiHAL 2350 CNC Controller
PIO Cores Move It, W5500 Connects It — A Deep Dive into the FlexiHAL 2350 CNC Controller

WIZnet - W5500
x 1
요약
FlexiHAL 2350은 캐나다 Expatria Technologies가 설계한 오픈소스 CNC 모션 컨트롤러로, Raspberry Pi RP2350 MCU와 WIZnet W5500 온보드 Ethernet을 결합해 실시간 모션 제어와 안정적인 네트워크 통신을 단일 보드에서 구현합니다. RP2350의 PIO 코어가 고속 스텝 신호 생성을 전담하고, W5500이 TCP/IP 처리를 오프로딩하는 역할 분리 구조가 이 보드의 핵심입니다. GRBLHAL과 LinuxCNC를 모두 지원하며 CERN-OHL-S V2 오픈소스 라이선스로 공개되어, 취미 메이커부터 소형 산업 자동화 구축자까지 폭넓게 활용할 수 있습니다.
개요
CNC 라우터나 밀링 머신을 직접 제작하는 메이커라면 컨트롤러 선택에서 반드시 마주치는 세 가지 문제가 있습니다. 첫째는 EMI(전자기 간섭) 입니다. 스테퍼 모터와 스핀들 VFD가 만들어내는 노이즈는 신호선을 타고 컨트롤러 MCU까지 역류할 수 있습니다. 둘째는 지터(jitter) 입니다. USB 기반 통신은 OS 스케줄러 간섭으로 인해 스텝 신호 타이밍이 흔들리고, 이것이 가공 품질로 직결됩니다. 셋째는 배선 복잡성입니다. 리밋 스위치, RS-485 드라이버, 릴레이 출력, 스핀들 PWM 등을 별도 모듈로 조합하면 배선이 기하급수적으로 늘어납니다.
FlexiHAL 2350은 이 세 문제를 하나의 보드에서 해결하는 것을 설계 목표로 합니다. 전 머신 facing I/O에 갈바닉 절연을 적용해 EMI 역류를 차단하고, RP2350 PIO 코어 기반의 하드웨어 스텝 생성으로 지터 문제를 해소하며, RS-485·릴레이·스핀들 제어를 온보드에 통합해 배선을 최소화합니다. 이 프로젝트는 PrintNC를 중심으로 한 DIY CNC 커뮤니티의 요구에서 출발했으며, CERN-OHL-S V2 라이선스 아래 상업적 파생까지 허용하는 완전 오픈소스 하드웨어로 공개되었습니다.
대상 사용자는 GRBLHAL 또는 LinuxCNC 기반 CNC 머신을 구축하는 메이커, 소형 공작기계 자작 개발자, 그리고 Ethernet 기반 원격 운영 환경이 필요한 소규모 자동화 구축자입니다.
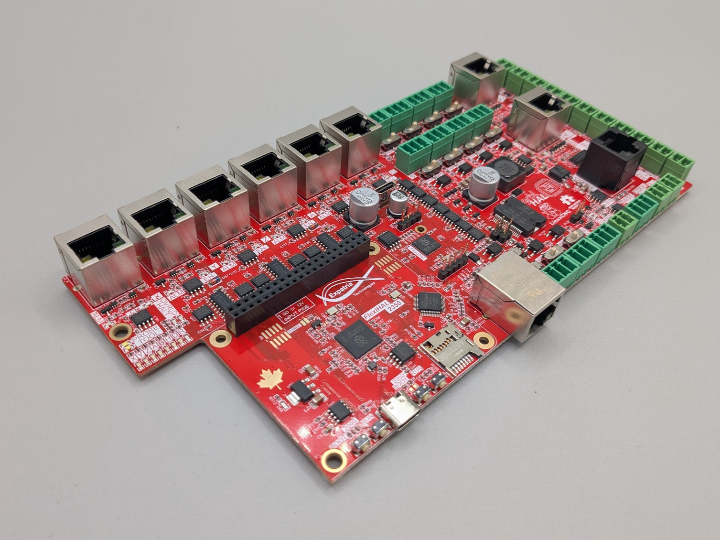
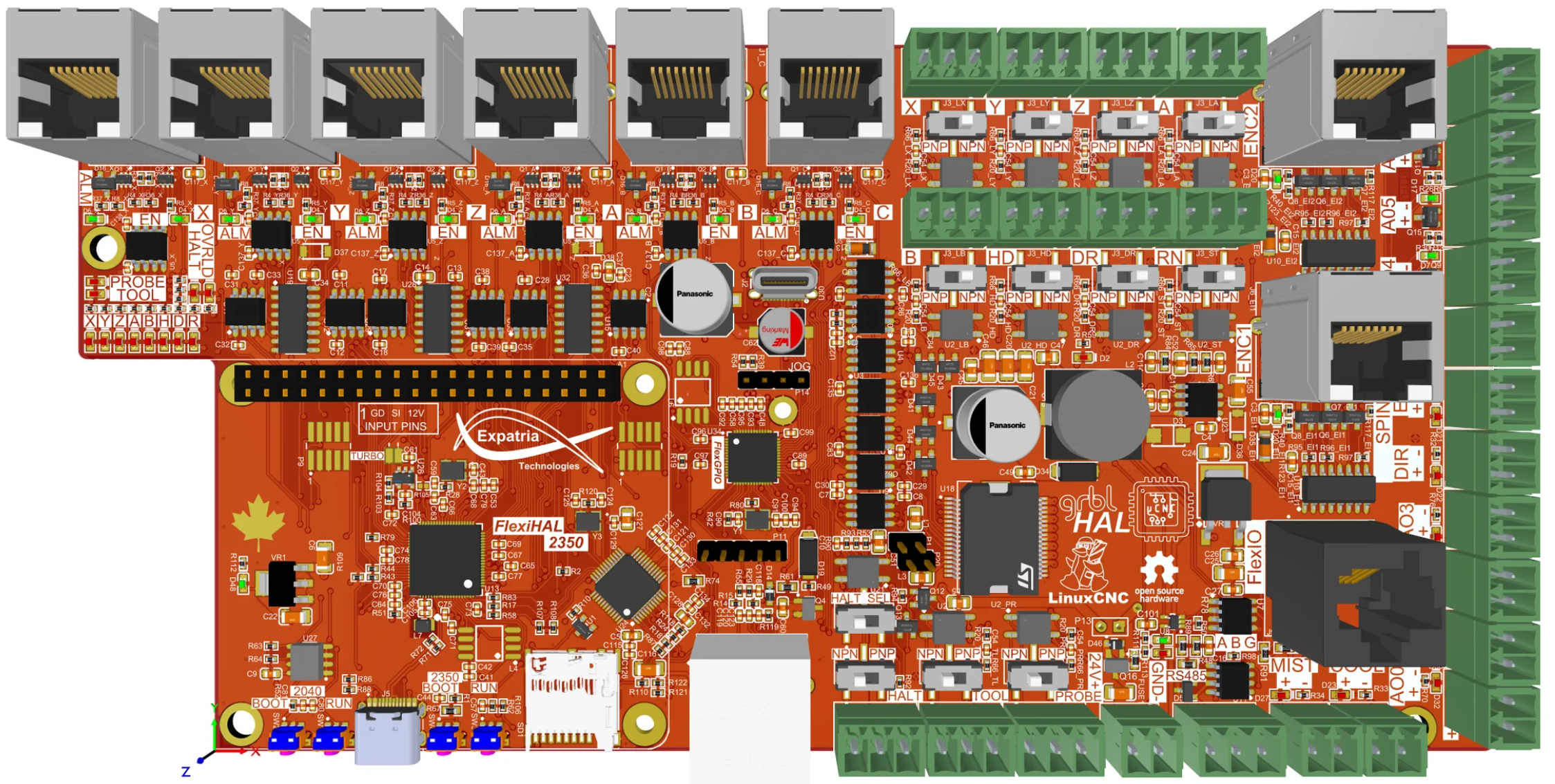
핵심 하드웨어 구성
RP2350 — PIO 코어가 만드는 실시간 스텝 생성
RP2350은 Raspberry Pi가 설계한 듀얼코어 MCU로, ARM Cortex-M33과 RISC-V Hazard3 코어를 동시에 탑재합니다. CNC 제어에서 RP2350의 핵심 강점은 PIO(Programmable I/O) 코어입니다. PIO는 메인 CPU와 독립적으로 동작하는 소형 상태 머신으로, 마이크로초 단위의 정밀한 스텝/디렉션 신호를 CPU 개입 없이 생성합니다. 이는 소프트웨어 타이머 기반 스텝 생성에 비해 지터를 구조적으로 제거하는 방식이며, FlexiHAL 2350이 6축 동시 제어를 안정적으로 수행할 수 있는 기반입니다.
FlexGPIO — RP2040 기반 보조 확장
보드에는 RP2040 기반 FlexGPIO I2C 확장 MCU가 탑재되어 있습니다. 이 보조 MCU는 GRBLHAL 플러그인과 연동해 추가 GPIO를 I2C로 확장하며, 메인 RP2350의 핀 자원을 절약하는 역할을 합니다. 두 MCU 각각에 UF2 부트로더 버튼이 별도로 제공됩니다.
갈바닉 절연 + RS-422 차동 드라이버
머신과 맞닿는 전 I/O 라인은 갈바닉 절연으로 MCU 영역과 분리됩니다. 여기에 더해 스텝/디렉션 신호에는 고속 디지털 절연기와 RS-422 차동 드라이버를 적용해 신호 무결성을 높이고 장거리 배선에서도 안정적인 스텝 전달이 가능합니다.
통합 주변 기능
- 6축 절연 Step/Dir 출력
- RS-485 (자동 방향 제어, Modbus 연동 가능)
- 15개 범용 입력 (리밋 스위치, 엔코더 2채널, 보조 입력)
- 8채널 고전류 릴레이 드라이버 (Flood/Mist/스핀들 포함)
- 5V PWM 레이저/스핀들 제어 출력
- 5V 온보드 레귤레이터, USB-C 연결
- Raspberry Pi 40핀 GPIO 헤더 (RPi 직결 LinuxCNC 운영 지원)
아키텍처
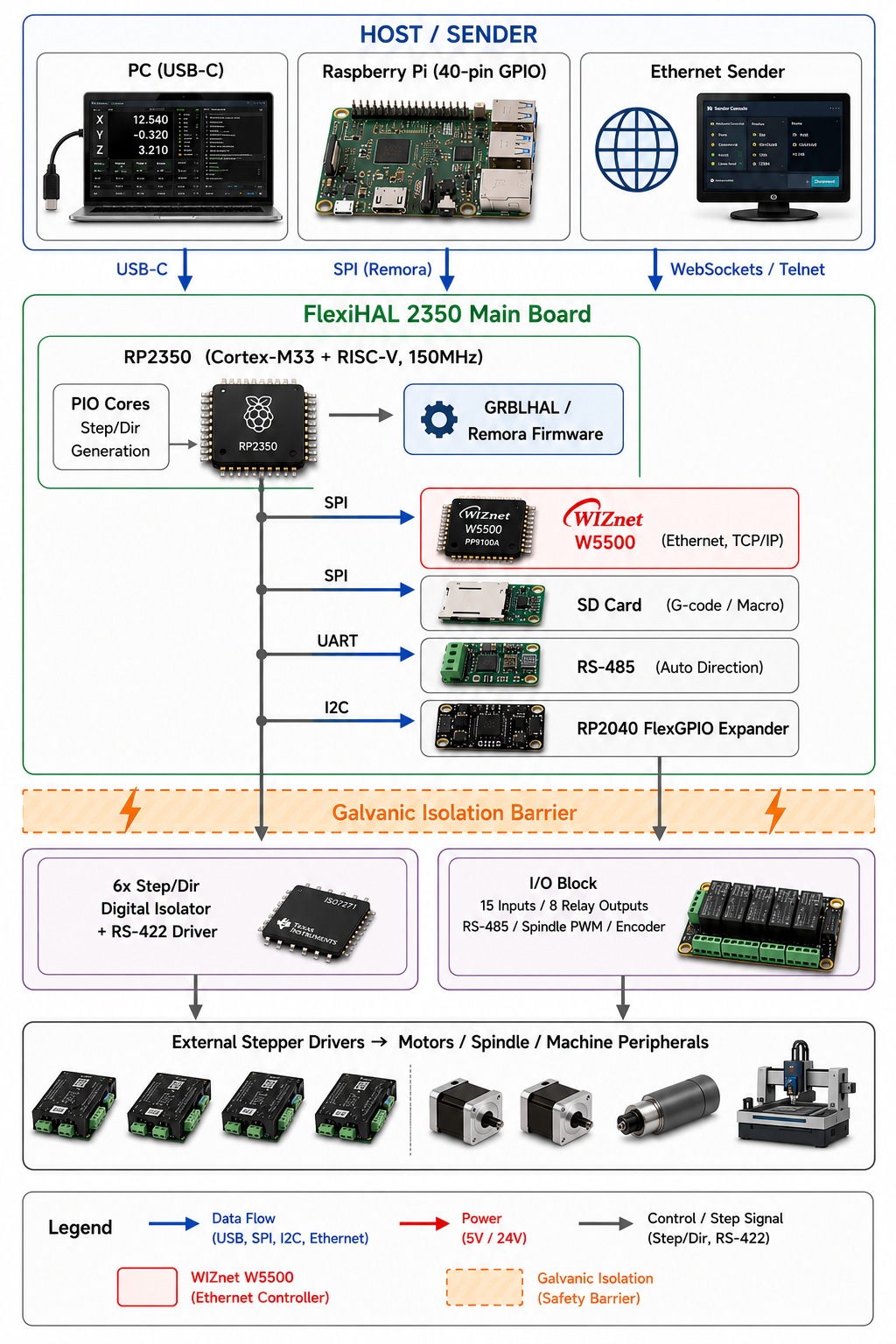
데이터 흐름은 크게 두 경로로 나뉩니다. 모션 제어 경로는 RP2350 PIO 코어 → 갈바닉 절연 → RS-422 차동 드라이버 → 외부 스테퍼 드라이버로 이어지며, 소프트웨어 개입 없는 하드웨어 레벨 스텝 생성이 핵심입니다. 네트워크 통신 경로는 외부 호스트 → W5500(TCP/IP 처리) → RP2350(GRBLHAL 명령 해석 및 실행)으로 이어지며, TCP/IP 스택 처리 부담이 RP2350 메인 코어에서 분리됩니다.
WIZnet 적용 구조
온보드 W5500의 역할
FlexiHAL 2350에는 WIZnet W5500이 온보드 Ethernet 컨트롤러로 탑재되어 있습니다. W5500은 하드웨어 TCP/IP 오프로딩 방식으로 동작합니다. TCP, UDP, IPv4, ARP 등 네트워크 프로토콜 처리를 전용 하드웨어 로직이 수행하며, RP2350은 SPI 인터페이스를 통해 소켓 단위로 데이터를 주고받기만 합니다. 이 구조 덕분에 RP2350 메인 코어는 G-code 해석, PIO 스텝 생성, I/O 관리에 집중할 수 있습니다.
역할 분리: PIO와 W5500
FlexiHAL 2350의 설계 철학을 한 문장으로 요약하면 "실시간 제어는 PIO가, 네트워크는 W5500이" 입니다.
| 역할 | 담당 |
|---|---|
| 스텝/디렉션 신호 생성 (6축) | RP2350 PIO 코어 |
| G-code 해석 및 모션 계획 | RP2350 메인 코어 |
| TCP/IP 스택 처리 (WebSockets/Telnet) | W5500 |
| 소켓 데이터 송수신 | RP2350 ↔ W5500 (SPI) |
| RS-485 / 릴레이 / GPIO 확장 | RP2350 + RP2040 FlexGPIO |
GRBLHAL의 Ethernet 플러그인은 W5500이 제공하는 소켓 API를 통해 WebSockets 또는 Telnet 프로토콜로 호스트 PC의 G-code 송신 소프트웨어(예: ioSender)와 통신합니다. USB 연결 없이 네트워크만으로 CNC 머신을 운영할 수 있어, 공작실 PC를 머신 바로 옆에 배치할 필요가 없어집니다.
Remora + LinuxCNC Ethernet 연동
W5500은 Remora 펌웨어와 LinuxCNC의 Ethernet 연동에도 사용됩니다. Remora는 LinuxCNC의 실시간 컴포넌트를 외부 MCU에서 구동하는 아키텍처로, 기존에는 Raspberry Pi SPI 연결이 주된 방식이었습니다. FlexiHAL 2350에서는 W5500 기반 Ethernet을 통해 LinuxCNC 호스트와 Remora 펌웨어 간 실시간 데이터 교환이 가능합니다. 단, 이 기능은 현재 베타 단계로, 사용자가 직접 컴포넌트를 컴파일해야 합니다.
이전 세대 대비 발전: 외장 모듈 → 온보드 통합
이전 세대 FlexiHAL(STM32F4xx 기반)에서는 Ethernet 기능이 별도의 uFlexiNET 모듈(W5500 탑재)을 40핀 GPIO 헤더에 장착하는 방식이었습니다. FlexiHAL 2350에서는 W5500이 메인 보드에 직접 통합되어, 모듈 착탈에 따른 물리적 불안정성과 케이블 스트레인 문제가 해소되었습니다. 이 통합은 단순한 편의성 개선이 아니라, Ethernet을 CNC 컨트롤러의 기본 통신 인프라로 격상시키는 설계 방향의 전환입니다.
기술 특징
- UF2 부트로더: 펌웨어 업데이트가 USB 드라이브에 파일 복사하는 수준으로 단순화됨. RP2350과 RP2040 FlexGPIO 각각에 독립 부트 버튼 제공
- SD카드 G-code 스트리밍: 온보드 SD카드에 G-code, 서브루틴, 매크로를 저장하고 직접 실행. 루프·조건 분기 포함한 복잡한 가공 프로그램 운용 가능
- GRBLHAL + LinuxCNC 듀얼 지원: 동일 하드웨어에서 두 펌웨어를 선택해 사용 가능. 취미 사용자는 GRBLHAL로, 고급 사용자는 LinuxCNC+Remora로 전환
- 완전 오픈소스 하드웨어: CERN-OHL-S V2 라이선스로 스키매틱, PCB 설계 파일 전체 공개. 상업적 파생 제품 제작도 허용 (단, 동일 라이선스 유지 조건)
비즈니스 가치
외부 고객 가치
FlexiHAL 2350은 단순한 취미 보드를 넘어 소형 생산 환경에서 실질적인 가치를 제공합니다.
- 소규모 공작소 / 프로토타입 제조: Ethernet 기반 원격 운영으로 머신과 작업자 PC를 분리 배치. 가공 중 발생하는 EMI가 작업용 PC에 영향을 주지 않음
- 교육용 CNC 환경: 오픈소스 설계 파일과 UF2 부트로더로 학생들이 직접 보드를 이해하고 커스터마이징 가능. GRBLHAL의 표준 G-code 지원으로 CAM 소프트웨어 연동 용이
- 취미 메이커의 기능 업그레이드: PrintNC, LowRider CNC 등 커뮤니티 머신에서 기존 USB 컨트롤러를 대체해 Ethernet + SD카드 기반 독립 운영 환경으로 전환
- 소형 산업 자동화 파일럿: W5500 기반 Ethernet과 RS-485 Modbus 연동을 활용해, 상위 SCADA 또는 HMI 시스템과 연결하는 소형 자동화 셀 구성 가능
내부 기술 인사이트 (WIZnet 관점)
RP2350처럼 실시간 제어에 특화된 MCU와 W5500을 조합하는 구조는, "MCU가 잘하는 일(실시간 제어)"과 "W5500이 잘하는 일(TCP/IP 처리)"을 명확히 분리하는 설계 패턴의 대표 사례입니다. CNC 컨트롤러는 산업 자동화 영역에서 W5500의 적용 범위를 보여주는 강력한 레퍼런스이며, 유사한 실시간 제어 + 네트워크 통신 조합이 필요한 로봇 컨트롤러, 모션 스테이지, 다축 서보 드라이버 설계에 직접 응용 가능한 구조입니다.
한계 및 개선 방향
현재 한계
- BETA 단계 제품: 현재 출시된 Rev A3.1은 베타 릴리스로, 공식 기술 지원이 제공되지 않음. 문제 발생 시 Discord 커뮤니티에 의존
- LinuxCNC Ethernet 연동 미완성: Remora + W5500 기반 LinuxCNC Ethernet 연결은 베타 수준. 사용자가 직접 컴포넌트를 컴파일해야 하며 안정성 검증이 진행 중
- 이중 MCU 관리 부담: RP2350과 RP2040 FlexGPIO의 펌웨어를 각각 별도로 관리해야 하며, 두 MCU 간 버전 호환성 유지가 필요
- 네트워크 지터 의존성: GRBLHAL WebSockets 운영은 로컬 네트워크 환경 품질에 따라 실시간성이 달라질 수 있음. USB 대비 지터가 낮지만, 네트워크 스위치 품질과 트래픽 환경의 영향을 받음
개선 방향
FlexiHAL 2350이 현재 확인한 가능성은 명확합니다. 온보드 W5500 통합, PIO 기반 스텝 생성, 완전한 갈바닉 절연이라는 세 가지 설계 원칙은 다음 방향으로 발전할 수 있습니다.
- LinuxCNC Ethernet 안정화: Remora+W5500 조합의 실시간 스레드 지터 측정값을 커뮤니티와 공유하고, 베이스 스레드 최적화를 통해 고속 가공 환경에서의 신뢰성 확보
- MQTT / 산업 프로토콜 확장: W5500의 소켓 인터페이스를 활용해 MQTT 기반 IoT 모니터링 또는 Modbus TCP 상위 연동을 추가하면 소형 산업 자동화 셀로서의 완성도가 높아짐
- 단일 MCU 아키텍처 검토: 차기 버전에서 FlexGPIO 기능을 RP2350B(48핀 패키지)로 흡수하면 펌웨어 관리 복잡성을 줄이고 BOM 비용도 절감 가능
FAQ
Q. 기존 GRBLHAL 보드에서 FlexiHAL 2350으로 마이그레이션하는 난이도는 어느 정도인가요? GRBLHAL 펌웨어를 사용 중이라면 UF2 파일 복사로 펌웨어 설치가 완료됩니다. 핀 배치는 기존 FlexiHAL 세대와 다르므로 배선 재구성이 필요하지만, GRBLHAL 설정 파라미터 자체는 대부분 이식 가능합니다.
Q. USB 없이 Ethernet만으로 완전한 운영이 가능한가요? GRBLHAL 환경에서는 W5500 기반 WebSockets 또는 Telnet을 통해 G-code 송신, 설정 변경, SD카드 파일 관리(FTP)까지 Ethernet만으로 처리할 수 있습니다. USB-C는 MCU 전원 공급 또는 펌웨어 업데이트 시에만 필요합니다.
Q. 어떤 외부 스테퍼 드라이버와 호환되나요? Step/Dir 인터페이스를 지원하는 드라이버라면 원칙적으로 모두 호환됩니다. RS-422 차동 출력이므로 차동 입력을 지원하는 드라이버(예: Leadshine, Gecko, DMM 등)에서 최대 신호 무결성을 발휘합니다. 싱글엔드 입력 드라이버는 차동 신호를 싱글엔드로 변환하는 수신기를 드라이버 측에서 지원해야 합니다.
Q. LinuxCNC Ethernet 연동을 실제로 사용하려면 어떻게 해야 하나요? 현재는 Remora 펌웨어를 직접 컴파일하고, Remora-eth LinuxCNC 컴포넌트를 Raspberry Pi 또는 LinuxCNC 호스트 PC에 직접 빌드해야 합니다. Expatria Discord 채널에 진행 중인 개발 스레드가 있으며, 관련 리포지토리는 아래에서 확인할 수 있습니다. → https://github.com/Expatria-Technologies/Remora-STM32F4xx-W5500
Q. 오픈소스 라이선스이면 상업용 제품에도 사용할 수 있나요? CERN-OHL-S V2는 상업적 활용을 허용합니다. 단, 이 설계를 기반으로 파생 제품을 만들 경우 동일한 CERN-OHL-S V2 라이선스로 설계 파일을 공개해야 하는 조건(Copyleft)이 적용됩니다.
프로젝트 리포지토리: → https://github.com/Expatria-Technologies/FlexiHAL_2350
제품 구매 페이지: → https://expatria.myshopify.com/en-us/products/flexihal-2350-cnc-controller-rev-a3-1-for-grblhal-and-linuxcnc
TL;DR
The FlexiHAL 2350 is an open-source CNC motion controller designed by Canada-based Expatria Technologies. It combines a Raspberry Pi RP2350 MCU with an onboard WIZnet W5500 Ethernet controller to deliver real-time motion control and stable network communication on a single board. The core design principle is a clear division of labor: the RP2350's PIO cores handle high-speed step generation, while the W5500 offloads all TCP/IP processing. Supporting both GRBLHAL and LinuxCNC under the CERN-OHL-S V2 open-source license, the board targets everyone from hobbyist makers to small-scale industrial automation builders.
Overview
Any maker who has built a CNC router or milling machine from scratch knows three recurring problems with CNC controllers. The first is EMI (electromagnetic interference). Stepper motors and spindle VFDs generate noise that can travel back through signal lines and reach the controller's MCU. The second is jitter. USB-based communication is subject to OS scheduler interference, causing timing variations in step signals that directly affect machining quality. The third is wiring complexity. Combining separate modules for limit switches, RS-485 drivers, relay outputs, and spindle PWM results in wiring that grows unmanageable fast.
The FlexiHAL 2350 targets all three problems on a single board. Galvanic isolation on every machine-facing I/O line blocks EMI from reaching the MCU. RP2350 PIO-based hardware step generation eliminates jitter at the architectural level. And onboard RS-485, relay drivers, and spindle control reduce external wiring to a minimum. The project grew out of the needs of the PrintNC DIY CNC community and is published as fully open-source hardware under the CERN-OHL-S V2 license, permitting commercial derivatives.
The primary audience includes makers building GRBLHAL or LinuxCNC-based CNC machines, developers designing small custom machine tools, and automation builders who need Ethernet-based remote operation.
Key Hardware
RP2350 — Real-Time Step Generation via PIO Cores
The RP2350 is a dual-core MCU from Raspberry Pi featuring both ARM Cortex-M33 and RISC-V Hazard3 cores. Its standout feature for CNC applications is the PIO (Programmable I/O) subsystem. PIO state machines operate independently from the main CPU, generating precise step/direction signals at microsecond resolution without any CPU intervention. This structurally eliminates jitter caused by software timer-based step generation and is the reason FlexiHAL 2350 can reliably drive 6 axes simultaneously.
FlexGPIO — RP2040-Based I/O Expander
The board also integrates an RP2040-based FlexGPIO I2C expander as a secondary MCU. Working with the GRBLHAL FlexGPIO plugin, it extends available GPIO over I2C and conserves pin resources on the main RP2350. Both MCUs have independent UF2 bootloader buttons.
Galvanic Isolation + RS-422 Differential Drivers
Every machine-facing I/O line passes through a galvanic isolation barrier, keeping the MCU domain electrically separate from the machine domain. Step and direction signals additionally pass through high-speed digital isolators and RS-422 differential drivers, maximizing signal integrity and enabling stable step delivery over longer cable runs.
Integrated Peripherals
- 6-axis isolated Step/Dir output
- RS-485 with automatic direction control (Modbus-capable)
- 15 general-purpose inputs (limit switches, 2 encoder channels, auxiliary)
- 8 high-current relay driver outputs (Flood / Mist / Spindle included)
- 5V PWM laser/spindle control output
- Onboard 5V regulator, USB-C connectivity
- Raspberry Pi 40-pin GPIO header (direct RPi integration for LinuxCNC)
Architecture
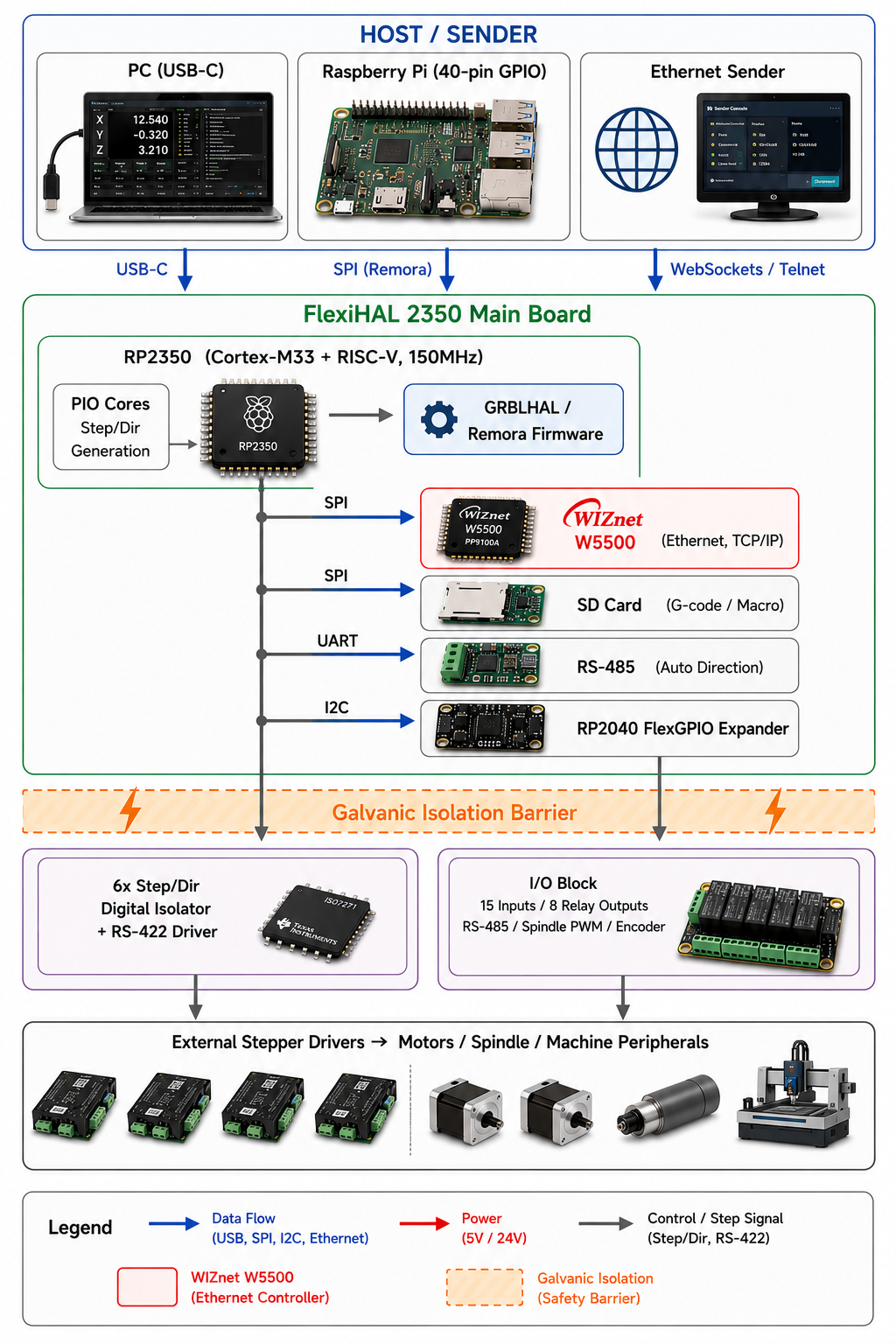
Data flows through two distinct paths. The motion control path runs from the RP2350 PIO cores → galvanic isolation barrier → RS-422 differential drivers → external stepper drivers. Step signals are generated entirely in hardware, with no software intervention in the timing-critical loop. The network communication path runs from an external host → W5500 (TCP/IP processing) → RP2350 (G-code parsing and motion planning). TCP/IP stack processing is fully offloaded from the RP2350 main cores.
Where WIZnet Fits
The Role of the Onboard W5500
The FlexiHAL 2350 integrates a WIZnet W5500 as its onboard Ethernet controller. The W5500 uses a hardwired TCP/IP offloading architecture: TCP, UDP, IPv4, ARP, and other protocol processing runs entirely in dedicated hardware logic. The RP2350 communicates with the W5500 over SPI, exchanging data at the socket level. This keeps the RP2350 main cores free to focus on G-code parsing, PIO step generation, and I/O management.
Division of Labor: PIO and W5500
The design philosophy of the FlexiHAL 2350 can be summarized in one sentence: "PIO handles real-time control; W5500 handles the network."
| Function | Responsible Component |
|---|---|
| Step/Dir signal generation (6 axes) | RP2350 PIO cores |
| G-code parsing and motion planning | RP2350 main cores |
| TCP/IP stack processing (WebSockets / Telnet) | W5500 |
| Socket data exchange | RP2350 ↔ W5500 via SPI |
| RS-485 / relay / GPIO expansion | RP2350 + RP2040 FlexGPIO |
GRBLHAL's Ethernet plugin uses the socket API provided by the W5500 to communicate with G-code sender software (such as ioSender) over WebSockets or Telnet. This enables fully wireless-free, USB-free CNC operation over a local network, removing the need to place a PC directly next to the machine.
Remora + LinuxCNC Ethernet Integration
The W5500 also supports Remora firmware with LinuxCNC Ethernet connectivity. Remora is an architecture that runs LinuxCNC's real-time components on an external MCU. While SPI-based Raspberry Pi connection was previously the primary method, the FlexiHAL 2350 enables real-time data exchange between a LinuxCNC host and the Remora firmware over W5500-based Ethernet. This feature is currently in beta and requires users to compile their own components.
From External Module to Onboard Integration
In the previous-generation FlexiHAL (STM32F4xx-based), Ethernet was provided by a separate uFlexiNET add-on module (W5500-based) installed on the 40-pin GPIO header. With the FlexiHAL 2350, the W5500 is integrated directly on the main board, eliminating the physical instability and cable strain associated with plug-in modules. This is more than a convenience improvement — it signals a design shift that treats Ethernet as a first-class communication interface for CNC controllers, not an optional add-on.
Technical Highlights
- UF2 Bootloader: Firmware updates are as simple as copying a file to a USB drive. Both the RP2350 and the RP2040 FlexGPIO expander have independent boot buttons for separate firmware management.
- SD Card G-Code Streaming: G-code files, subroutines, and macros are stored and executed directly from an onboard SD card. Complex machining programs with loops and conditional branching are fully supported.
- Dual Firmware Support (GRBLHAL + LinuxCNC): The same hardware runs either firmware. Hobbyist users can start with GRBLHAL and switch to LinuxCNC + Remora for more advanced configurations without changing hardware.
- Fully Open-Source Hardware: Schematics and PCB design files are published under the CERN-OHL-S V2 license. Commercial derivative products are permitted, provided they are released under the same license.
Business Value
Value for End Users
The FlexiHAL 2350 delivers practical value beyond the hobbyist bench, extending into small production environments.
- Small machine shops / prototype manufacturing: Ethernet-based remote operation lets the operator's PC stay away from the machine, protecting it from EMI generated during cutting.
- CNC education environments: Open-source design files and UF2 firmware updates allow students to inspect, understand, and modify the board. Standard G-code support through GRBLHAL ensures compatibility with common CAM software.
- Hobbyist machine upgrades: Replaces USB-based controllers in community machines such as PrintNC and LowRider CNC, enabling Ethernet + SD card-based standalone operation.
- Small industrial automation pilots: The combination of W5500 Ethernet and RS-485 Modbus makes it viable to connect the board to SCADA or HMI systems as part of a small automation cell.
Technical Insight (WIZnet Perspective)
The pairing of a real-time-focused MCU like the RP2350 with the W5500 is a textbook example of separating what each component does best: the MCU handles deterministic real-time control, and the W5500 handles TCP/IP. CNC controllers are a compelling reference design that demonstrates W5500's applicability in industrial-grade motion control contexts, and the same architecture pattern applies directly to robot controllers, motion stages, and multi-axis servo drive designs.
Limitations and Future Improvements
Current Limitations
- Beta release: Rev A3.1 is a beta product with no official technical support. Issues are handled through the community Discord server.
- LinuxCNC Ethernet not fully production-ready: The Remora + W5500 LinuxCNC Ethernet path is still in beta. Users must compile their own components, and stability validation is ongoing.
- Dual-MCU firmware management: The RP2350 and RP2040 FlexGPIO each require separate firmware management, and version compatibility between the two must be maintained.
- Network jitter dependency: GRBLHAL WebSockets operation is influenced by local network quality. While jitter is lower than USB in typical setups, network switch quality and traffic conditions still affect real-time performance.
Future Improvements
The FlexiHAL 2350 establishes three strong design principles — onboard W5500 integration, PIO-based step generation, and full galvanic isolation — that point clearly toward the next steps.
- LinuxCNC Ethernet stabilization: Publishing real-time thread jitter benchmarks for the Remora + W5500 combination and optimizing the base thread period would establish reliability for high-speed machining workloads.
- MQTT / industrial protocol expansion: Adding MQTT-based IoT monitoring or Modbus TCP integration through the W5500's socket interface would strengthen the board's case as a small industrial automation node.
- Single-MCU architecture consideration: A future revision absorbing FlexGPIO functionality into an RP2350B (48-pin package) could reduce firmware complexity and BOM cost.
FAQ
Q. How difficult is it to migrate from an existing GRBLHAL board to the FlexiHAL 2350? If you are already running GRBLHAL, firmware installation is just a UF2 file copy. Pin assignments differ from previous FlexiHAL generations, so rewiring is required. Most GRBLHAL configuration parameters, however, carry over without major changes.
Q. Can the board operate entirely over Ethernet without USB? Yes, in a GRBLHAL setup. G-code streaming, settings management, and SD card file operations (via FTP) all work over the W5500-based Ethernet connection. USB-C is only needed to supply MCU power or to perform firmware updates.
Q. Which external stepper drivers are compatible? Any driver supporting a Step/Dir interface is compatible in principle. Drivers with differential (RS-422) inputs — such as those from Leadshine, Gecko, or DMM — will get the best signal integrity from the RS-422 outputs. Single-ended input drivers require a differential-to-single-ended receiver on the driver side.
Q. How do I get started with LinuxCNC Ethernet connectivity? Currently, this requires compiling the Remora firmware yourself and building the Remora-eth LinuxCNC component on your Raspberry Pi or LinuxCNC host PC. An active development thread is available on the Expatria Discord server. The relevant repository is linked below. → https://github.com/Expatria-Technologies/Remora-STM32F4xx-W5500
Q. Can I use this design commercially under the open-source license? CERN-OHL-S V2 permits commercial use. However, any product derived from this design must release its design files under the same CERN-OHL-S V2 license — a Copyleft condition that applies to hardware derivatives.
Project Repository: → https://github.com/Expatria-Technologies/FlexiHAL_2350
Product Page: → https://expatria.myshopify.com/en-us/products/flexihal-2350-cnc-controller-rev-a3-1-for-grblhal-and-linuxcnc
-
Project Repository

-
Product Page