
Laser Scripter
Laser Scripter is Remote controlled Laser engraver to print script on card. The contend is controlled by mobile or remote computer.

WIZnet - WizFi360-EVB-Pico
x 1

Arduino - Arduino MotorShield Rev3
x 1

seeed - Gear Stepper Motor Driver Pack
x 1

Arduino - Arduino IDE
x 1
1 Laser Scripter is Remote controlled Laser engraver to print script on card. The contend is controlled by mobile or remote computer.
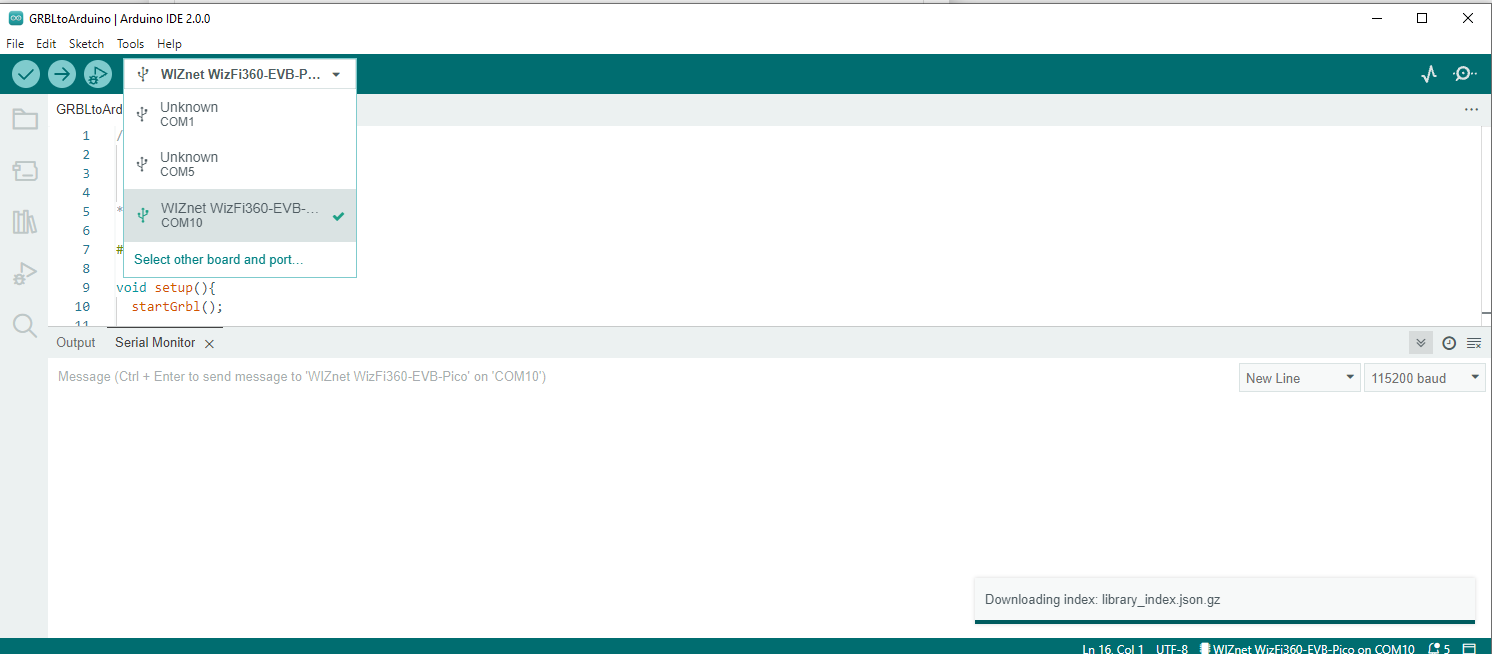
2 Install Board Support for Arduino IDE 2.0 and Connect WizFi360 Board
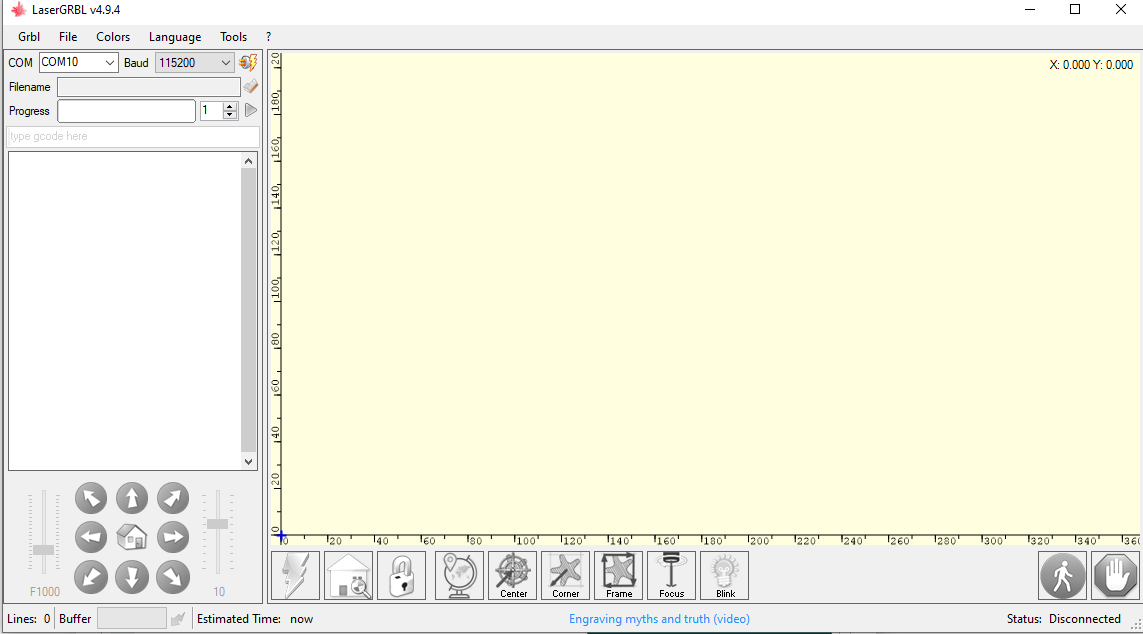
3 Install and run LaserGBRL
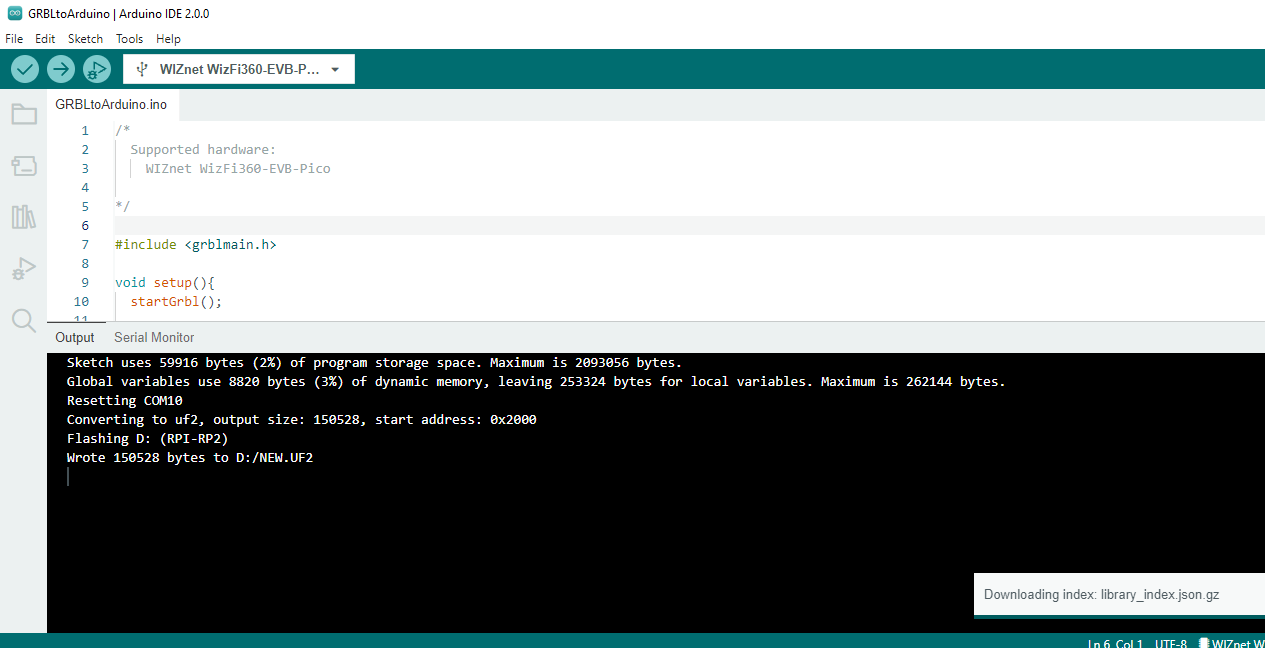
4 Porting the GBRL library for Arduino
There has been library for Arduino AVR board only, I have port the drive to Wizfi360 in VS code
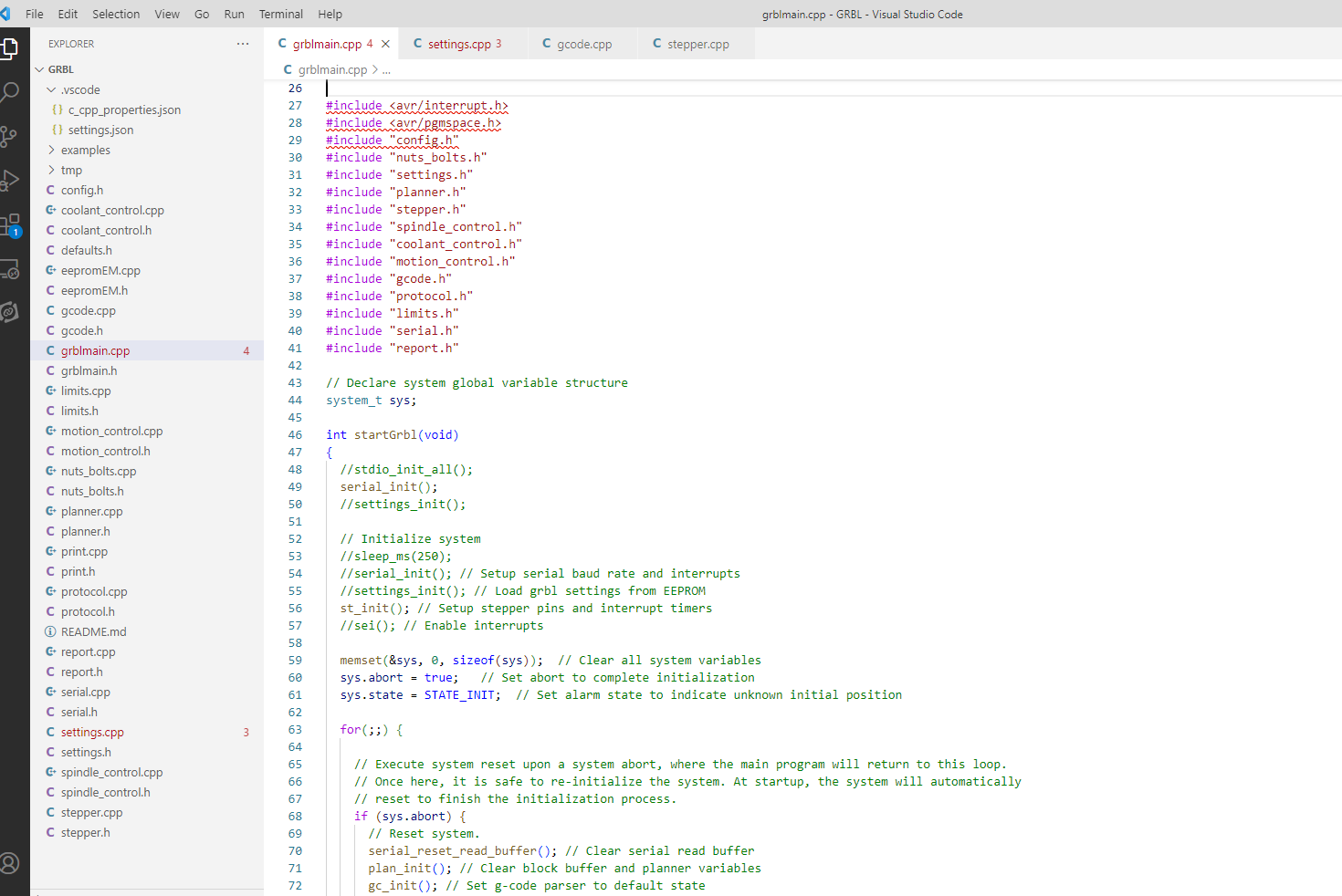
The full code is attached in zip file
The code is complete in structure for G-code which is used for robot arm control and 3D engraver or laserEnscriptor, this is fully functional project.
And verify and upload to the board successfully
This time, I use the UART port only, in fact the wifi is test and better for LaserGRBL control over the air.
Core of the program is as follows to control the laser engraver in loop
#include <avr/interrupt.h>
#include <avr/pgmspace.h>
#include "config.h"
#include "nuts_bolts.h"
#include "settings.h"
#include "planner.h"
#include "stepper.h"
#include "spindle_control.h"
#include "coolant_control.h"
#include "motion_control.h"
#include "gcode.h"
#include "protocol.h"
#include "limits.h"
#include "serial.h"
#include "report.h"
// Declare system global variable structure
system_t sys;
int startGrbl(void)
{
serial_init();
st_init(); // Setup stepper pins and interrupt timers
memset(&sys, 0, sizeof(sys)); // Clear all system variables
sys.abort = true; // Set abort to complete initialization
sys.state = STATE_INIT; // Set alarm state to indicate unknown initial position
for(;;) {
if (sys.abort) {
// Reset system.
serial_reset_read_buffer(); // Clear serial read buffer
plan_init(); // Clear block buffer and planner variables
gc_init(); // Set g-code parser to default state
protocol_init(); // Clear incoming line data and execute startup lines
spindle_init();
coolant_init();
limits_init();
st_reset(); // Clear stepper subsystem variables.
sys_sync_current_position();
sys.abort = false;
sys.execute = 0;
if (bit_istrue(settings.flags,BITFLAG_AUTO_START)) { sys.auto_start = true; }
#ifdef HOMING_INIT_LOCK
if (sys.state == STATE_INIT && bit_istrue(settings.flags,BITFLAG_HOMING_ENABLE)) { sys.state = STATE_ALARM; }
#endif
if (sys.state == STATE_ALARM) {
report_feedback_message(MESSAGE_ALARM_LOCK);
} else {
sys.state = STATE_IDLE;
protocol_execute_startup();
}
}
protocol_execute_runtime();
protocol_process(); // ... process the serial protocol
}
return 0; /* never reached */
}
The picture is loaded in the LaserGRBL and send to Wizfi360 to drive servos
-
LaserGRBL
LaserGRBL porting
