
INNOVATIVE CONVERGENCE: ROBOTICS AND WEARABLE COMPUTING TECHNOLOGIES
In this paper, the authors share the implementation of an innovative hands-free, voice-activated, wireless cloud-based technology for first

WIZnet - WizFi630S
x 1
Introduction In this paper, the authors share the implementation of an innovative hands-free, voice-activated [1], wireless cloudbased technology for first responders [2, 3] to save lives in hazardous or dangerous environments. Wearable computing is a proven technology that increases productivity by providing voice-activated control and hands-free capabilities. The modular scalable robotic platform has been designed to provide situational awareness by providing near real-time video and hazardous agent detection. The cloudbased supervisory control software provides first-responder teams with real-time wireless connectivity over Verizon’s 4G LTE network with experts located anywhere in the world. This end-to-end wireless connectivity includes sensor data, video, and cell connectivity for experts to provide remote assistance if needed.
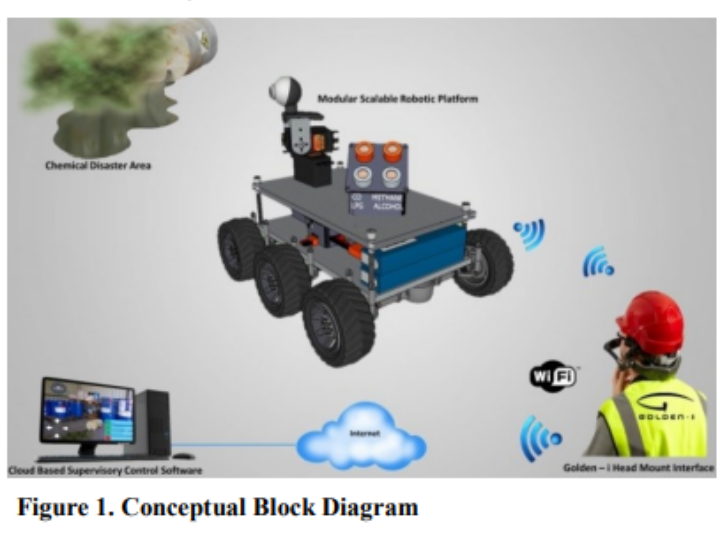
Conceptual System Design Figure 1 shows the conceptual system block diagram. A first responder would wear the Golden-i (head-mount display unit). From a distance, the RWCT system will be sent to the exposed area to perform an exposure assessment. To perform this assessment, real-time sensor data and video feed are displayed on the screen of the Golden-i, while controlling it through voice commands. An expert observes the same sensor data and video feed displayed in the Golden-i through the cloud-based supervisory control software (CBSCS). Cloud-based wireless connectivity allows experts to provide expert assistance remotely. The system provides such a level of wireless connectivity in a real-time fashion and there is end-to-end connectivity from the expert’s workstation remotely to the robot on site.

Design Implementation Strategy The RWCT system provides situational awareness to first -responder teams. The following methodology will be used to achieve such goal: A first responder wears the Golden-i. From a distance, the modular scalable robotic platform (MSRP) is sent to the exposed area to perform an exposure assessment. To perform this assessment, real-time sensor data and video feed are displayed on the screen of the Golden-i, while controlling it through voice commands. An expert observes the same sensor data and video feed displayed on the Golden–i through the cloud-based CBSCS. Cloudbased wireless connectivity allows experts to aid remotely. The RWCT system provides such a level of wireless connectivity in a real- time fashion. There is end-to-end connectivity from the CBSCS to the first responder on site to the MSRP. Figure 2 shows an end-to-end system design, where the robot communicates wirelessly to the firstresponder Golden-i module as well as being connected to the cloud-based supervisory control software

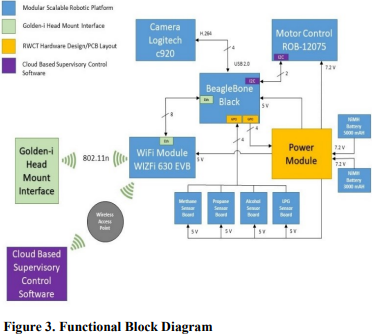
Modular Scalable Robotic Platform The MSRP consists of a 6-wheel platform with six DC motors. The MSRP was designed using a system integration approach with the BeagleBone Black as the main intelligence board. A motor controller (ROB-12075) controls the motors and servo movements via a dual H-bridge configuration. The WizFi 630 EVB provides wireless communication between the MSRP and the rest of the RWCT system. The MSRP counts with a Logitech c920 camera for video streaming capabilities. Individual sensor boards are integrated into the MSRP and have the ability to measure carbon monoxide, alcohol, methane, and liquid petroleum gas (LPG). A power module designed by RWCT provides the appropriate power to each of the individual modules. Finally, two rechargeable 10,000 mAH batteries provide power to the mobile platform. Cloud-Based Supervisory Control Software The RWCT system offers cloud-based connectivity through 802.11 protocols and third-party streaming services. Using a 4G wireless hotspot, all of the information received from the MSRP is transmitted to the CBSCS. The Golden-i and the CBSCS communicate through the same wireless network via standard IPV4 addressing. The CBSCS has a pre-installed GUI that accepts both the sensor and video feeds through a UDP connection at a specified port. This UDP connection begins at the Golden-i application and ends with the GUI at the CBSCS. The Golden-i mirrors the same data that are received from the MSRP. This provides access to users to the sensor data and video feed over the Internet. The data reside in a LiveCast mini-server and are accessed through authentication credentials provided by LiveCast. In case the user at the CBSCS would like to communicate with the Golden-i user, cell connectivity can be accomplished through the Golden-i via Bluetooth connected to a cell phone.
Sensor Modules Individual sensor modules are used as proof-of-concept that the system is able to detect hazard chemicals/gases. The sensor modules consist of multiple sensors that measure methane, alcohol, liquid petroleum gas (LPG), and carbon monoxide. The scope of the project is to deliver a system inwhich the end user is able to use other sensors and modules that best fit their applications. As proof of concept, the RWCT system uses sensor modules that only detect changes in gas concentration and transmit the data wirelessly. Each sensor has a signal conditioning circuit that conditions the sensor’s output signal.
Golden-i The hands-free head-mount display, known as the Golden-i, is an integral part of the RWCT system, as it serves as the bridge between the MSRP and the CBSCS. The specific version of the Golden-i is the 3.8 model. This model provides plenty of features and benefits, including voice commands, Bluetooth, and 802.11n wireless communications. The on-board OS is the Android 4.2.2 Jellybean and comes with proprietary software to easily code in custom voice commands to navigate the menu shown on the small HD display. The Golden-i is designed to be used as a hands-free device only controlled through voice and head tracking. Furthermore, the Golden-i also comes equipped with a 13-MP camera that can also be implemented as a feature in order to provide the CBSCS with a live-feed view of the first responder.
Wireless Communication The RWCT system has extensive use of the 802.11 b/g protocols. More commonly known as Wi-Fi, the RWCT system uses these protocols to wirelessly communicate between the cloud-based CBSCS, Golden-i, and the MSRP. Within these 802.11 protocols are two-packet structures. These packet structures are used in organizing the information in particular frames that will be sent across wireless channels. Transmission control protocol (TCP) is a packet structure that handles the information in a way such that reliability is ensured and packet integrity is maintained. TCP is the standard for sending information that can be corrupted, due to the nature of the data or the need to always have accurate data at hand. For the RWCT system, the sensor data that will be wirelessly transmitted must be accurate and must not be easily corrupted, due to the sensitive nature of the project. These sensor data are used to evaluate lifeand-death situations and, thus, data corruption must be avoided. Utmost reliability must be ensured, thus TCP is the packet structure that was selected for the RWCT system. TCP provides this reliability by synching with the target host and ensuring that every single packet has been successfully received via acknowledgement return packets. Communication first starts out with the device wanting to communicate and will open a connection to the target host. Once established through pre-defined ports, TCP will perform a 3-way handshake that will sync both the client and target host. User datagram protocol (UDP) is a simpler packet structure compared to TCP and is usually used in applications where the delay must be as low as possible. Thus, UDP is applied where there is a need for near real-time communication between two or more systems. In the RWCT system, such cases exist and require the use of UDP.
Wired Communication The RWCT system makes use of three very specific wired communication protocols, all of which are present on the MSRP. These wired communication methods are the primary form of communication found between the modules on the MSRP. The modules benefiting from this form of communications are the motor control module, Wi-Fi module, BeagleBone Black, and the sensor module. The Beagle Bone Black communicates over standard 802.11 Ethernet protocols over a CAT 6 twisted-pair physical wire. This is connected to one of the LAN ports on the WizFi 630 EVB, which acts as a wireless bridge to the Internet. From the perspective of the BeagleBone Black, it is assumed to be connected to the Internet through a wired connection. However, the WizFi 630 EVB provides Internet access through 802.11n protocols. Ethernet itself works within the standard frame consisting of a Preamble, SFD, Destination MAC, Source MAC, Ethertype, Payload, and the terminating FCS.

The power module receives power through two 7.4 V (10,000 mAH) NiMH batteries. One battery is solely dedicated to powering the motor controller and motors, while the other is used to power the various modules of the MSRP. The motors and motor controller need a separate battery, due to their high voltage and current demands. There are also LED indicators to show the status of the systems that are being supported by the power board. The PCB was designed with the dimensions of 9 cm of height and 6 cm of width. These dimensions were chosen to ensure that the board would fit the DAGU robot chassis.

The Golden-i display shows a graphical user interface in the form of an android application. The application contains a full-screen view of the video coming in from the robot along with an overlay showing four green circular lights that correspond to one of the four sensors. Whenever one of the sensor levels is tripped, the light turns red and remains that color until the gas concentration decreases enough to not trip the sensors. The overlay occupies about 1/5 of the bottom of the screen and is semi-transparent so as to not obstruct the video of the robot. The CBSCS graphical user interface consists of two applications that run simultaneously. Figure 6 shows the sensor data in real-time when a specific gas is being detected.

Cost Data A financial analysis was performed on the RWCT system. The total cost of the development of the prototype was $1581.43 for a single unit. Similarly, the unit cost for 100 units was estimated to be $1134.95. A cost analysis of the RWCT system was performed by assuming the estimated cost of the Golden-i. The cost difference comes from the individual components of the power board, which was designed by RWCT and the fabrication of the PCB layout, which was reduced significantly when ordering 100 boards. The reason why the cost of the RWCT system can be considered high is due to the implementation of innovative and novel technologies as well as the use of expensive equipment such as servers using 4G LTE connectivity.
Testing All tests covered by the test plan necessitate that the system under test be connected to a test application environment. A test environment should be designed to minimize any complicating factors that may result in anomalies unrelated to the test. The mobility of the MSRP through the Golden-i was extensively tested. After testing, it was noticed that the articulation of the wording needed to include two words for each command. If a single word is set for instructions, it is possible to activate the command by regular speech of the user. For that reason, all of the commands consist of a two-letter combination. The Golden-i adjusts to different accents and ambient noises present while articulating commands. After a few repetitions of commands, the commands are reliable, depending on the need of the user.

Conclusions Wearable computing is a proven technology that increases productivity by providing voice-activated control and hands -free capabilities. The modular scalable robotic platform was designed to provide situational awareness by providing near real-time video and hazardous agent detection. The cloud-based supervisory control software provides first responder teams with near-real time wireless connectivity over Verizon’s 4G LTE network with experts located anywhere in the world. This end-to-end wireless connectivity includes sensor data, video, and cell connectivity for experts to provide remote assistance if needed. Due to the modularity and scalability of the RWCT system, there are multiple applications in which it can be deployed. Applications include chemical, biological, radiological, and nuclear incidents (CBRN). The goal of the RWCT system was to provide an innovative solution to first responders to help them save lives in hazardous or dangerous environments.