
ESP32UDP - ESP32 + Native RMII or SPI Ethernet LinuxCNC Real time High Speed Smooth Motion Controlle
ESP32UDP turns an ESP32 plus RMII or W5500 Ethernet into a real-time LinuxCNC motion controller, generating multi-axis step pulses up to 200 kHz.
This project is an ESP32-based, real-time motion controller for LinuxCNC that uses Ethernet (either RMII PHY or a WIZnet W5500 SPI module) to turn a low-cost ESP32 board into a multi-axis external step generator + I/O interface capable of up to ~200 kHz step rates.
Below is an English-language curation aimed at makers and CNC tinkerers who want to understand what this project does, who’s behind it, how W5500 fits in, and where it’s making an impact.
ESP32 LinuxCNC Motion Controller (ESP32UDP)
ESP32_LinuxCNC_MotionController_RealTime by wezhunter
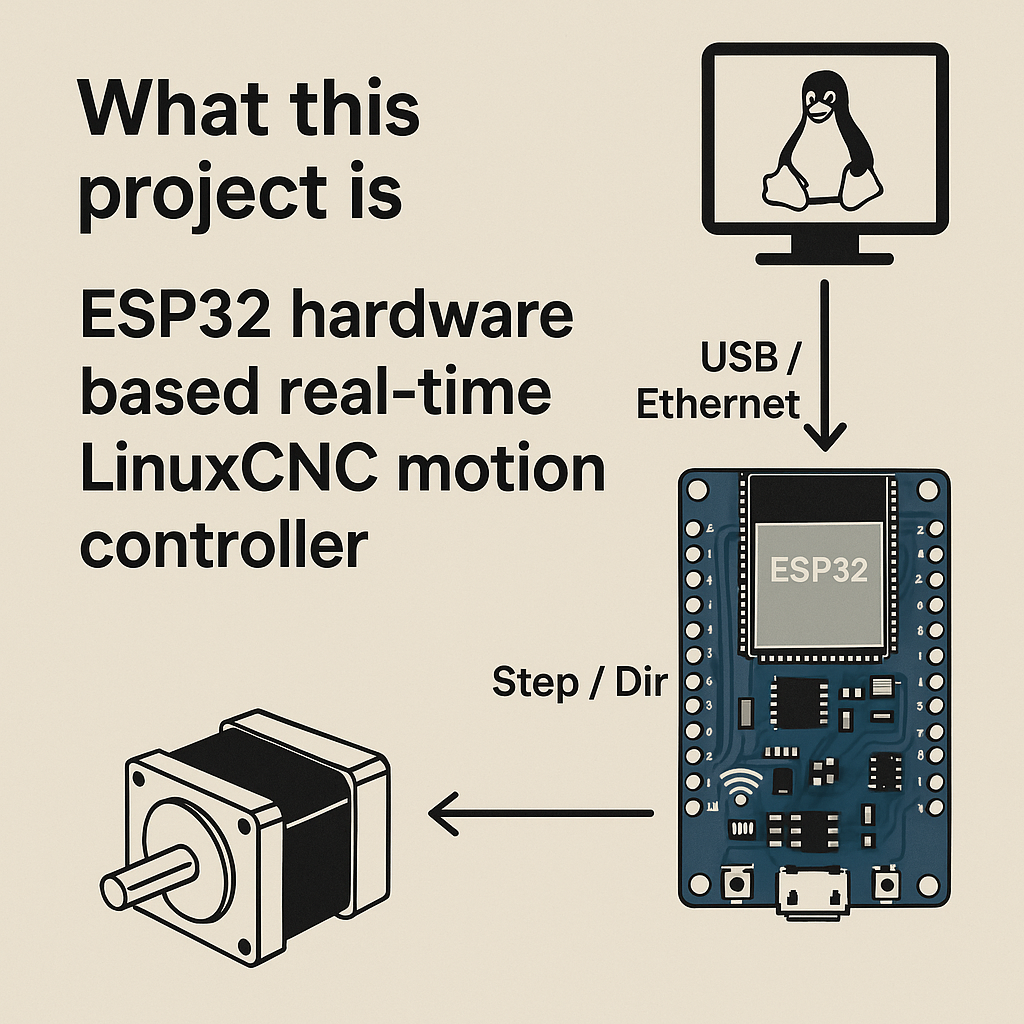
1. What this project is
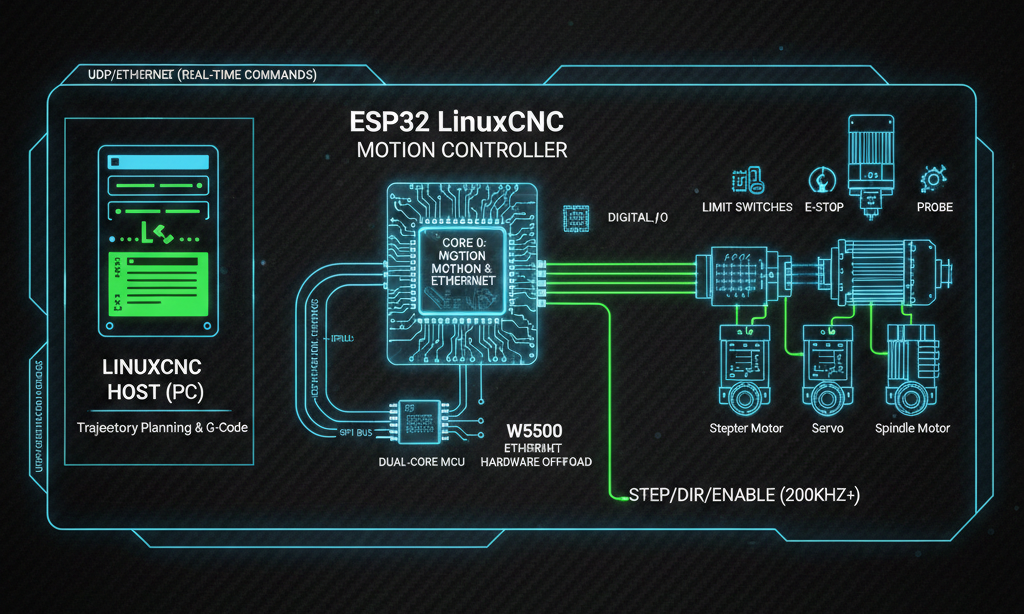
ESP32_LinuxCNC_MotionController_RealTime (often called ESP32UDP) is a firmware that turns a dual-core ESP32 into a real-time external motion controller for LinuxCNC, connected over UDP/Ethernet.
In simple terms:
- LinuxCNC (on a PC) does the trajectory planning and high-level control.
- It sends position/velocity commands and I/O values to the ESP32 over UDP.
- The ESP32 generates step/dir pulses and handles I/O in real time, offloading hard real-time work from the PC.
The project supports two Ethernet options:
- Native RMII Ethernet (ESP32 + LAN8720 or similar PHY)
- WIZnet W5500 SPI Ethernet module (the focus for WIZnet makers)
And it’s not just a toy: the firmware targets up to ~200 kHz total step pulse frequency (per axis up to 200 kHz; multi-axis combined limits depend on config), with newer work showing 300 kHz+ combined on ESP32-S2/S3 USB “virtual Ethernet” variants.
2. Quick background: what is LinuxCNC?
LinuxCNC is an open-source CNC control system that runs on Linux and is used to control mills, lathes, routers, plasma cutters, 3D printers, hexapods, robot arms, and more.
A few key points:
- It uses a real-time Linux kernel (RTAI or PREEMPT_RT) so it can execute motion control loops with fixed timing (e.g., 1 ms servo loop).
- It has a HAL (Hardware Abstraction Layer) that lets it talk to many kinds of hardware – from classic parallel ports and FPGA cards to Ethernet-based controllers.
- Traditionally the PC itself had to generate step pulses, but at high speeds / many axes this becomes difficult. External motion controllers like this ESP32 project let LinuxCNC focus on G-code and trajectory planning, while a separate device handles hard real-time step timing.
ESP32UDP lives exactly in that space: it is one of the main “ESP32 as a LinuxCNC motion controller” solutions.
3. Project overview (ESP32UDP at a glance)
From the project’s own description:
“Hardware based external step generator and IO interface for LinuxCNC over native RMII Ethernet or W5500 SPI Ethernet on a dual core ESP32…”
Features
- Up to 6 axes with STEP/DIR + ENABLE outputs
- 7 digital inputs + 7 digital outputs, all outputs can be PWM driven
- Uses the ESP32 RMT peripheral for high-rate, smooth step generation
- Runs position mode at low speeds and velocity mode at higher speeds to balance accuracy and smoothness
- Designed to run at up to ~200 kHz total step frequency, with newer variants (ESP32-S2/S3 USB virtual Ethernet) showing 300 kHz+ in testing
- Core 0: UDP networking + motion control logic
- Core 1: kept mostly free for user extensions / additional libraries
- Wi-Fi, ESP-NOW, Web UI, OTA and Telnet support exist in related repos / prototypes, but for deterministic motion the main path is wired Ethernet (RMII or W5500).
In short: you get a low-cost, 6-axis external motion controller that speaks UDP with LinuxCNC and can be wired to stepper/servo drives like any other step/dir motion card.
4. Author & community footprint
4.1 Who is behind it?
The main author is Wez Hunter (GitHub: wezhunter). The repo tagline is literally:
“ESP32 hardware based real-time LinuxCNC motion controller”
On the LinuxCNC forum, he appears under the nickname “wez” and started a long-running, high-traffic topic titled:
“ESP32/S2/S3 LinuxCNC Controller (6 axis hardware step gen, USB plug-and-play)”
That thread has ~200 replies and almost 50k views (as of mid-2025), which gives you an idea of how much interest there is in this family of controllers.
He also maintains ESP32_LinuxCNC_Wireless_Client, an ESP-NOW wireless pendant / MPG client that talks to the ESP32 motion controller over a low-latency point-to-point link.
4.2 Where is the project active, and what impact does it have?
- LinuxCNC forum
- The long thread “linuxcnc-esp32 Software Stepping over Ethernet Using ESP32” discusses HAL2UDP and then points users at this repo as the more modern, real-time controller.
- Users report real machines running with ESP32 + W5500 + LinuxCNC, mentioning step rates in the tens of kHz per axis and stable operation over wired Ethernet.
- YouTube & third-party content
- In videos like “linuxcnc espnow wireless control MPG via 2 esp32's”, the author explicitly credits: “Thanks wezhunter, whoever you are! github wezhunter/ESP32_LinuxCNC_Wireless_Client and wezhunter/ESP32_LinuxCNC_MotionController_RealTime.”
- Other videos demonstrate “LinuxCNC + ESP32 step generator + W5500 Ethernet” and external step generation via W5500, further amplifying the pattern ESP32 + W5500 + LinuxCNC.

- WIZnet maker ecosystem & HAL2UDP lineage
- WIZnet’s own maker site features a re-curation titled “High-Speed CNC Step Generator: LinuxCNC, ESP32, W5500 Ethernet Integration”, which is based on HAL2UDP – a closely related project that inspired this repo and also uses W5500.
- In the README credits, Wez explicitly thanks Juhász Zoltán (HAL2UDP) for his original concept: an external step generator and I/O interface for LinuxCNC using ESP32 + W5500 SPI Ethernet.
- CNC forums & semi-commercial use
- Various CNC forums (e.g., in Polish and French) link directly to this repo and describe it as an “ESP32 LinuxCNC real-time motion controller”, with some posts offering pre-flashed boards as retrofit modules.
In practice, this firmware is now one of the go-to reference designs when people ask, “Can I use an ESP32 as an external motion controller for LinuxCNC?”
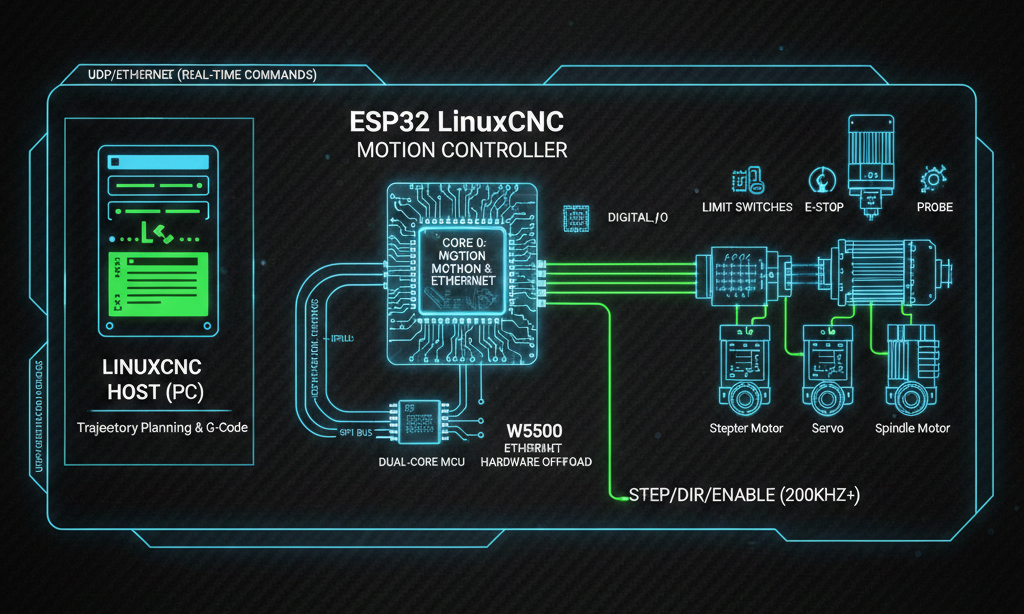
5. Architecture & data flow
5.1 High-level architecture
From the README and HAL docs:
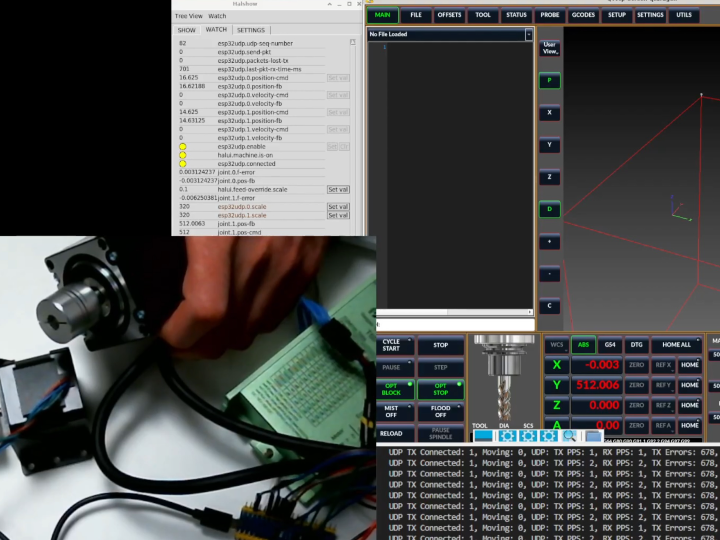
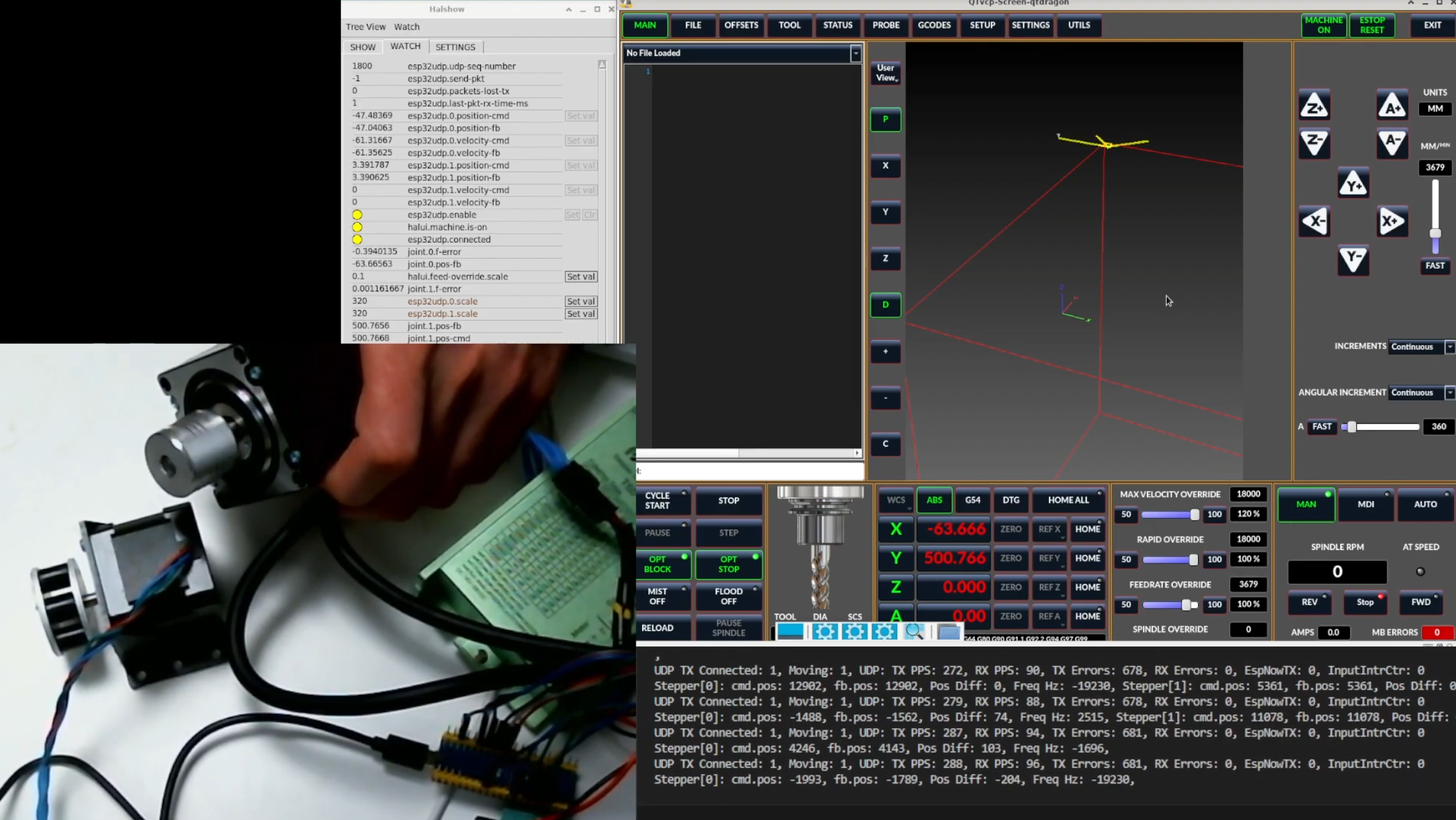
- LinuxCNC host (PC)
- A HAL component (commonly referred to as
esp32udp) exposes pins such as:esp32udp.axis.N.position_cmd,.velocity_cmdesp32udp.out.N,esp32udp.pwm.Nesp32udp.enable, etc.
- At each servo cycle, LinuxCNC writes commands into these pins and the component sends them via UDP to the ESP32.
2. ESP32 motion controller
- Core 0 runs a main loop that:
- Receives UDP packets
- Parses axis commands and I/O values
- Feeds these into RMT-based step generators and GPIO/PWM outputs
- Computes feedback (position_fb, velocity_fb, I/O states, packet counters) and sends a reply packet back
- Core 1 is mostly free for user-level extensions or additional logic.
3. Step generation & control modes
- At low speeds, the controller operates in position mode (following LinuxCNC’s commanded positions).
- At higher speeds, it operates in velocity mode, which is more efficient and smoother for high-frequency stepping.
4. Ethernet transport
- Network connectivity can be provided by:
- RMII PHY (e.g., LAN8720) using the ESP32’s native MAC, or
- WIZnet W5500 SPI Ethernet module
- Both are supported; the key difference is whether Ethernet is handled inside the ESP32 or offloaded to W5500.
5.2 What data actually crosses the wire?
Based on HAL pin structure and docs, the UDP payload contains:
Host → ESP32 (commands)
- Axis commands (float):
position_cmd[N]velocity_cmd[N]
- Digital outputs:
out[N](booleans) for relays, coolant, spindle on/off, etc. - PWM outputs:
pwm[N](0–1 duty) for spindle speed or analog-like control. - Control flags: enable, reset, configuration triggers.
ESP32 → Host (feedback)
- Axis feedback (float):
position_fb[N]velocity_fb[N]
- Digital inputs:
in[N](limit switches, home switches, E-stop, probes, etc.) - Status & diagnostics: ready flags, lost packet counts, last packet time, sequence numbers, etc.
LinuxCNC’s real-time loop uses these to close the high-level control loop, while the step timing and I/O pulse edges are generated precisely on the ESP32.
6. W5500 in this project – what exactly does it do?
6.1 HAL2UDP roots and W5500
The README’s credits section states (paraphrased):
Credit goes to Juhász Zoltán for his original HAL2UDP concept — an external step generator and I/O interface for LinuxCNC using W5500 SPI Ethernet and software-based step generation on ESP32.
ESP32UDP started from that work, but the firmware has since diverged significantly.
So historically:
- HAL2UDP = “ESP32 + W5500 + LinuxCNC over UDP,” mostly velocity-mode step gen.
- ESP32UDP (this project) generalises and extends the idea: position+velocity modes, higher step rates, more boards, RMII support, better tooling.
6.2 Typical W5500 setups
You’ll see W5500 used in setups like:
- Generic ESP32 DevKit + W5500 module (via SPI)
- MKS-DLC32 CNC board with:
- Direction/enable via I2S pins
- Step lines on an EXP header
- W5500 connected via SPI pins and an INT pin on another header
All of this is configured in Config.h and via the serial command interface (e.g., choosing SPI-W5500 as Ethernet type, setting SPI pins, IP/DHCP options).
6.3 Why W5500, not just native Ethernet or Wi-Fi?
LinuxCNC users care a lot about determinism:
- Wi-Fi is convenient but has unpredictable latency and jitter.
- The ESP32’s native Ethernet MAC (RMII) is powerful, but LinuxCNC forum users have seen buffer/ENOMEM-type issues in certain configurations, especially under heavy load.
A W5500 brings a few concrete advantages:
- Hardware TCP/UDP/IP offload
- W5500 includes MAC, PHY and a hardware TCP/UDP/IP stack with internal buffers.
- The ESP32 talks to it via SPI, so it only sees relatively small chunks of data and socket-level events, not every frame and ARP/NIC detail.
- More predictable timing
- Offloading Ethernet to W5500 stabilises latency and jitter, which is exactly what a CNC motion system cares about.
- It also reduces the risk of the motion core being disturbed by spikes in the networking stack.
- Proven pattern in the community
- HAL2UDP and numerous user builds (e.g., “external step generation using ESP32 + W5500” threads) demonstrate that ESP32 + W5500 + LinuxCNC is a well-trodden path.
So in this project, W5500 is effectively the “wired Ethernet brain”: the component that lets the ESP32 motion controller sit on an industrial Ethernet network in a robust, low-jitter way.
7. Why this project matters
- A flagship “ESP32 as LinuxCNC controller” example
- For people searching “LinuxCNC ESP32 Motion Controller”, this repo is one of the top recommended solutions in forum threads, blogs, and YouTube videos.
2. Low-cost retrofit and hobby CNC
- Compared to proprietary motion control cards, an ESP32 + W5500 + open-source firmware is incredibly affordable, and can be customised thanks to the ESP-IDF / Arduino ecosystem.
- Some CNC forums even show pre-flashed ESP32 motion controller modules based on this firmware being sold as plug-in retrofit solutions.
3. For WIZnet makers: a “real” industrial-ish reference
- This is not a blinking-LED demo. It’s a project where W5500 is used in a demanding real-time CNC motion context.
- If you want to understand how to combine ESP32 + W5500 + UDP for high-rate, low-latency motion or machine control, this repo and its HAL2UDP ancestor are essentially textbook-level references.
8. Quick start (high-level checklist)
This is not a full setup guide, but a rough roadmap if you want to experiment.
Hardware (example)
- An ESP32 DevKit or CNC-oriented board (e.g., WT32-ETH01, MKS-DLC32)
- A W5500 SPI Ethernet module (or an RMII PHY like LAN8720)
- 3–6 stepper/servo drivers (TB6600, DM542, etc.) wired with STEP/DIR/ENABLE
- Limit switches, home switches, E-stop, probe, etc.
Firmware side
- Clone the repo and open it in VS Code + PlatformIO.
2. In Config.h (and/or via serial commands):
- Select SPI_W5500 as Ethernet type
- Configure SPI pins (MOSI/MISO/SCLK/CS) and W5500 INT pin
- Set IP / DHCP options
- Map STEP/DIR/ENABLE pins for each axis and I/O pins as needed
3. Build and flash the firmware.
LinuxCNC side
- Install LinuxCNC with development headers and
halcompile. - Build and install the
esp32udpHAL component (or use the version provided in this project’s docs). - Configure a network interface on the same subnet as the ESP32 (e.g. 192.168.111.x/24 if that’s the default).
- In your HAL file, load
esp32udpand connect its pins (position_cmd,position_fb,out,in, etc.) to the relevant joints, I/O, and GUI signals.
At that point you’ve built a system where LinuxCNC runs on a PC, planning trajectories, and an ESP32 + W5500 motion controller actually drives the motors and I/O in hard real time.
이 프로젝트는 LinuxCNC를 위한 외부 실시간 모션 컨트롤러를 ESP32 하나로 구현한 것으로,
ESP32 + Ethernet(RMII 또는 W5500 SPI) 만으로 최대 200kHz급 멀티축 스텝 제너레이터와 IO 인터페이스를 만드는 것을 목표로 합니다.
아래 내용은 WIZnet Maker Site 등에서 영문으로 소개하기 위한 한국어 큐레이션 입니다.
ESP32 LinuxCNC Motion Controller (ESP32UDP)
(ESP32_LinuxCNC_MotionController_RealTime by wezhunter)
1. Overview — 이 프로젝트는 무엇을 하는가?
ESP32_LinuxCNC_MotionController_RealTime(별칭: ESP32UDP)는
듀얼 코어 ESP32를 이용해 LinuxCNC와 UDP/Ethernet으로 통신하는 실시간 외부 모션 컨트롤러 & IO 인터페이스입니다.
README의 헤드라인을 풀어서 정리하면:
역할
LinuxCNC가 호스트 PC에서 모션 계획(trajectory planning)을 수행하고,
그 결과(축별 위치/속도 명령)를 UDP 패킷으로 ESP32에 보내면,
ESP32가 하드웨어에서 직접 스텝 펄스·IO를 실시간 생성/제어하는 구조.
Ethernet 옵션
Native RMII Ethernet (LAN8720 등 PHY)
W5500 SPI Ethernet 모듈
두 옵션 모두 지원하며, RMII/ W5500 별도로 빌드/설정 가능.
성능
최대 200kHz급 스텝 출력(축당 최대 200kHz, 전체 400kHz까지 언급)
최신 노트에서는 ESP32-S2/S3 USB 가상 Ethernet 환경에서 멀티축 300kHz 이상도 실험적으로 확인.
운전 모드
저속에서는 position mode, 고속에서는 velocity mode로 동작해
저속 정밀도와 고속 부드러움을 동시에 노립니다.
하드웨어 리소스
최대 6축 STEP/DIR + ENABLE
7개의 디지털 입력, 7개의 디지털 출력(모두 PWM 가능)
ESP32 RMT 주변장치로 고속·부드러운 스텝 생성
코어 0: 네트워크 + 모션 제어, 코어 1: 사용자 확장용
요약하면, 이 프로젝트는 LinuxCNC의 실시간 스텝 생성·IO 처리를 ESP32로 외부 위임하고,
그 연결을 Ethernet(RMII 또는 W5500 SPI) 로 처리하는 모션 컨트롤러 펌웨어입니다.
2. LinuxCNC란 무엇인가? — 배경 이해용
LinuxCNC는 리눅스 기반의 오픈소스 CNC 제어 소프트웨어 시스템으로,
밀링머신, 선반, 3D 프린터, 레이저/플라즈마 커터, 로봇 암, 헥사포드 등의 기계를 G-code로 구동할 수 있습니다.
특징
리눅스 실시간 커널(RTAI, PREEMPT_RT 등)을 사용해 1ms 단위의 반복 실시간 루프에서
위치 읽기 → 새 타겟 계산 → 하드웨어에 명령 쓰기 패턴을 수행.
최대 9축까지 제어 가능, G-code(ISO RS-274NGC)를 인터프리트하여 경로 계획.
HAL(Hardware Abstraction Layer)을 통해 PCI/병렬포트/Ethernet 등 다양한 하드웨어와 결합 가능.
왜 외부 모션 컨트롤러가 필요한가?
전통적으로는 PC가 직접 step/dir을 내보냈지만,
고속·고축 시스템에서는 PC의 실시간 부담이 커지고, I/O 확장이 제약됩니다.
이 프로젝트처럼 ESP32 + Ethernet 외부 스텝 제너레이터를 사용하면,
LinuxCNC는 “고수준 모션 계획”에 집중하고,
실제 스텝 펄스/IO 타이밍은 ESP32가 책임지는 듀얼 구조가 가능합니다.
3. Author & Community — 누가 만들고, 어디서 영향력이 있나?
3-1. 저자: Wez Hunter (wezhunter)
GitHub 프로필 상 메인 프로젝트가 바로 이 리포지터리:
“ESP32 hardware based real-time LinuxCNC motion controller”로 소개되어 있습니다.
LinuxCNC 포럼에서는 닉네임 “wez”로 활동하며,
ESP32/S2/S3 LinuxCNC Controller (6 axis hardware step gen, USB plug-and-play) 스레드를 열어
ESP32/S2/S3 기반 저비용·플러그앤플레이 모션 컨트롤러 비전을 설명합니다.
USB 가상 Ethernet, 6축 RMT 스텝 제너레이터, 향후 ESP32-P4 가능성까지 논의하며
LinuxCNC + ESP32 계열 논의의 핵심 기여자로 자리 잡았습니다.
별도 리포지터리인 ESP32_LinuxCNC_Wireless_Client를 통해
ESP-NOW 기반 무선 MPG/펜던트 클라이언트도 제공하고 있어,
유·무선 혼합 제어 구조를 함께 제안하고 있습니다.
3-2. 커뮤니티 & 파급력
LinuxCNC 포럼
linuxcnc-esp32 Software Stepping over Ethernet Using ESP32 스레드에서
HAL2UDP → ESP32UDP 계열 프로젝트들이 적극적으로 논의됩니다.
여러 사용자가 ESP32 + W5500 + LinuxCNC 구성으로
40kHz~100kHz급 스텝, 안정적인 UDP 통신 성능을 공유하며,
레트로핏/자작 CNC 장비에 실제 적용한 사례를 보고합니다.
YouTube & 외부 UCC
linuxcnc espnow wireless control MPG via 2 esp32's 영상에서는
“Thanks wezhunter, whoever you are!”라는 멘트와 함께
이 프로젝트와 ESP32 Wireless Client를 활용한 무선 MPG 데모를 보여줍니다.
WIZnet Maker / HAL2UDP 계열 레퍼런스
WIZnet Maker Site에 올라온
“High-Speed CNC Step Generator: LinuxCNC, ESP32, W5500 Ethernet Integration” 및
“LinuxCNC + esp32 step generator + w5500 ethernet” 리큐레이션 글은,
HAL2UDP + W5500 기반 구조를 소개하고 있는데,
이 프로젝트의 README에서도 HAL2UDP를 직접 Credits로 언급합니다.
해외 CNC 포럼 / 상용화 시도
폴란드·프랑스 CNC 포럼 등에서는
“ESP32 LinuxCNC RealTime Motion Controller”를 소개하며,
아예 이 펌웨어를 올린 ESP32 모듈을 제품 형태로 판매하는 글도 올라옵니다.
→ 결과적으로 이 프로젝트는 LinuxCNC 세계에서 ‘ESP32 기반 외부 모션 컨트롤러’의 대표 레퍼런스로 자리하고 있고,
W5500·ESP-NOW·ESP32-S2/S3 USB까지 엮어 새로운 저비용 실시간 제어 흐름을 만들어내는 인플루언서 역할을 하고 있습니다.
4. How It Works — 구조 & 데이터 플로우
4-1. 시스템 아키텍처
README 및 관련 문서 기준 전체 구조는 다음과 같습니다.
LinuxCNC 호스트(PC)
HAL 컴포넌트 esp32udp.comp를 통해
각 축의 position_cmd / velocity_cmd,
디지털 출력/입력, PWM 값 등을 ESP32에 UDP 패킷으로 전송.
ESP32로부터 position_fb / velocity_fb / IO 상태 / 패킷 통계 등을 되돌려 받습니다.
ESP32 모션 컨트롤러
코어 0: UDP 통신, 명령 파싱, 스텝/IO 생성, 피드백 계산.
코어 1: 사용자 확장 코드/추가 라이브러리용 여유 코어.
ESP32 RMT 주변장치로 6축까지 고속 스텝 생성,
저속 position mode·고속 velocity mode 전환을 통해 부드러운 모션 구현.
Ethernet 계층
RMII PHY(LAN8720 등)를 사용하는 Native Ethernet
W5500 SPI Ethernet 모듈
둘 중 하나를 선택해 UDP를 사용하고, WiFi는 부가적인 관리/OTA 용도로 사용 가능합니다.
4-2. LinuxCNC ↔ ESP32 사이에 오가는 데이터
HAL 핀 구조를 기준으로 보면, 다음과 같은 데이터가 W5500/RMII를 통해 오갑니다.
호스트 → ESP32 (명령)
축별 위치·속도 명령: position_cmd, velocity_cmd (float)
디지털 출력: out[0..N] (bit) — 예: 릴레이, 펌프, 스핀들 on/off
PWM 값: pwm[0..N] (float, duty 0..1) — 예: 스핀들 속도 등
enable, reset, config 관련 플래그
ESP32 → 호스트 (피드백)
position_fb / velocity_fb: 실제 위치·속도 피드백
디지털 입력: in[0..N] — 리미트 스위치, 홈 스위치, E-stop 등
네트워크 상태: lost_packets, seq_num, last_rx_time_ms 등
LinuxCNC는 이 데이터를 1ms 단위 실시간 루프에서 주기적으로 읽고 쓰며,
실시간 제약이 큰 스텝 타이밍은 ESP32로 넘기고,
G-code 실행·경로 계획·GUI 응답성에 집중할 수 있습니다.
5. W5500 & SPI Ethernet — 이 프로젝트에서의 WIZnet 역할
5-1. HAL2UDP와의 관계, W5500의 출발점
README의 Credits에는 다음 문장이 있습니다:
“Credit goes to Juhász Zoltán for his original great work and concept for the HAL2UDP components using W5500 SPI Ethernet and software-based step generation on ESP32. This project was originally based on it but the firmware source hardly resembles any of it now.”
즉, 이 프로젝트는 처음에 HAL2UDP (jzolee/HAL2UDP),
즉 ESP32 + W5500 모듈 기반 외부 스텝 제너레이터를 바탕으로 시작했고,
현재는 RMII/W5500를 모두 아우르는 대규모 리팩터 버전으로 발전했습니다.
5-2. 어떤 보드/구성에서 W5500을 쓰는가?
ESP32 DevKit + W5500 모듈 (일반적인 조합)
MKS-DLC32 같은 CNC 보드에서,
I2S 핀으로 DIR/ENABLE을 빼고,
STEP은 EXP1 헤더로,
W5500 SPI는 EXP2 + I2C 핀에 배선하는 예시를 README에서 설명합니다.
설정은 Config.h와 시리얼 CLI를 통해
Ethernet 타입(RMII or SPI),
SPI 핀맵, W5500 INT 핀, IP/DHCP 등을 지정하는 방식으로 이루어집니다.
5-3. W5500이 가져다주는 이점
하드웨어 TCP/UDP/IP 스택
ESP32 자체 스택 대신, MAC/PHY + 소켓 처리는 W5500이 맡아
ESP32는 순수 모션/타이밍에 집중할 수 있습니다.
예측 가능한 지연·지터
실시간 CNC 제어에서는 패킷 로스·변동 지연이 곧 기계 품질 문제로 이어지기 때문에,
W5500 기반 하드웨어 Ethernet은 WiFi 대비 훨씬 안정적인 선택입니다.
ESP32 Native Ethernet의 메모리 한계 회피
LinuxCNC 포럼에서는
네이티브 ESP32 Ethernet 스택에서 ENOMEM 등 버퍼 부족 문제가 나올 수 있다는 의견이 있었고,
외부 W5500을 사용하면 이런 리스크를 줄일 수 있다는 경험담도 공유됩니다.
한 문장으로 정리하면,
W5500은 이 프로젝트에서 “ESP32 모션 컨트롤러를 LinuxCNC 네트워크에 안전하게 연결해주는 하드웨어 Ethernet 브레인” 역할을 합니다.
6. Where This Content Has Impact — 어디서 의미가 큰가?
LinuxCNC 커뮤니티의 대표 ESP32 모션 컨트롤러 레퍼런스
LinuxCNC 포럼, WIZnet Maker, 여러 블로그/유튜브에서
“ESP32 + W5500 + LinuxCNC” 예제를 소개할 때
HAL2UDP와 함께 이 리포지터리가 거의 필수로 언급됩니다.
저비용 CNC 레트로핏/자작시장
기성 모션카드(예: Mesa, EtherCAT 보드 등)에 비해
“ESP32 + W5500 + 오픈소스 펌웨어” 조합은 가격이 매우 낮고,
ESP32 IDF/Arduino 생태계와 맞물려 커스터마이징 자유도도 큽니다.
일부 해외 포럼에서는 이 펌웨어를 올린 ESP32 보드를
레트로핏용 모션 컨트롤러 모듈로 판매하기도 합니다.
WIZnet Maker 관점에서의 교과서적 사례
단순 IoT 예제가 아닌,
수십~수백 kHz 스텝이 필요한 실제 CNC/모션 제어에서
W5500 + ESP32 + LinuxCNC가 어떻게 쓰이는지를 보여주는 생생한 프로젝트입니다.
WIZnet 기반 Ethernet을 “공장·기계 레벨 실시간 통신에 적용하는 패턴”을 배우기에 좋은 UCC입니다.
7. Quick Reproduce (요약 체크리스트)
하드웨어 예시
ESP32 DevKit 또는 WT32-ETH01 / MKS-DLC32 등
W5500 SPI Ethernet 모듈 (또는 RMII PHY)
3~6축 스텝 드라이버(TB6600, DM542 등) + 리미트 스위치/홈 스위치
펌웨어 측
리포지터리 클론 → VSCode + PlatformIO로 오픈
Config.h에서
Ethernet 타입: SPI_W5500 선택
SPI 핀(CS/MOSI/MISO/SCLK), INT 핀, IP/DHCP 설정
축 수, STEP/DIR/ENABLE 핀맵 설정
빌드/플래시 후, 시리얼 콘솔로 boardconf 등 명령을 사용해 세부 설정
LinuxCNC 호스트 측
linuxcnc-uspace-dev, build-essential 설치 후
sudo halcompile --install esp32udp.compESP32 IP에 맞는 NIC 설정 (예: 192.168.111.x/24)
HAL 파일에서 esp32udp.* 핀을 각 축·입출력 신호에 매핑
이 구성을 통해,
LinuxCNC는 고수준 모션 계획을 담당하고,
ESP32 + W5500은 외부에서 실시간 스텝/IO를 안정적으로 처리하는 듀얼 컨트롤 구조를 완성할 수 있습니다.