
Docking Interface for Aerial-Ground Robot Collaboration: Design and Implementation of an Autonomous
Docking Interface for Aerial-Ground Robot
Collaboration: Design and Implementation of an
Autonomous Coupling System

Project Overview
본 UGV/UAV “FIXIT” 로봇은 산업용 드론의 체공 한계를 해결하기 위해, 기체가 로버 상단 콘에 착륙하면 중력만으로 오정렬을 보정하고 접촉 전극으로 충전한 뒤 즉시 재이륙하도록 설계됐습니다. W5500이 제공하는 이더넷 스택은 결정론적 저지연 텔레메트리와 원격 펌웨어 업데이트 채널을 확보해 임무 RF 대역을 소모하지 않습니다.

Key Features
수동 45° 도킹 콘 – 착륙 오차 ±5 cm / ±10°까지 자동 센터링; 30° 설계 대비 지지물 96 % 감소, 인쇄 시간 35 % 단축
24 V 접촉식 충전 – 로버 DC-DC에 직접 연결, 무선 방식(~65 %) 대비 >90 % 효율
W5500 이더넷 텔레메트리 – RJ-45로 EMI 차단·고정 MAC; SPI 버스에서 MCU(마스터) ↔ W5500(슬레이브) 연결
모듈형 PX4/ROS2 스택 – Gazebo SITL로 안전한 알고리즘 반복 개발
Network Architecture
Drone ⇄ W5500 ⇄ RJ-45 ⇄ 스위치 ⇄ 운용 PC – 배터리 게이지, BMS 상태, 충전 전류를 JSON/TCP로 스트리밍하고, CLI 기반 업데이트(gbs/gcs)도 동일 링크를 사용합니다 .
Software Architecture
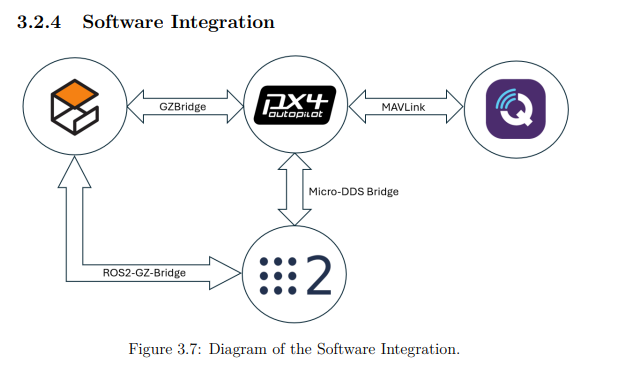
PX4와 ROS 2는 원천적으로 다른 미들웨어(uORB vs. DDS) 를 쓰지만, uXRCE-DDS 브리지 덕분에 동일 DDS 공간에 접속한다. 그럼에도 PX4는 저수준 실시간 제어, ROS 2는 고수준 자율·서비스라는 역할 분담은 그대로 유지된다는 것이 핵심
| 계층 | 구성 요소 | 주요 기능 |
|---|---|---|
| 시뮬·제어 | PX4 SITL (또는 실제 FC) | Gazebo 모델을 비행 제어 / 센서 융합으로 구동 |
| 미들웨어 | Micro-DDS Agent | uORB·PX4 ↔ ROS 2 간 2-Way 브리지 |
| ros_gz_bridge | Gazebo 토픽 ↔ ROS 2 토픽 매핑·변환 | |
| 응용 노드 | aruco_tracker, precision_land, uwb_* | 비전 기반 목표 추정, 고도 센싱, 상태머신 착륙 제어 |
| 운용 툴 | QGroundControl, rqt_image_view | MAVLink 지령·상태 모니터 / 이미지 피드 확인 |
| 통신 링크 | ① 무선 MAVLink (임무·텔레메트리)② W5500-Ethernet (유선 로그·펌웨어) | 임무 중 RF, 유지보수 시 RJ-45 분리 운용 |
UGV-UAV 결합 도킹 인터페이스
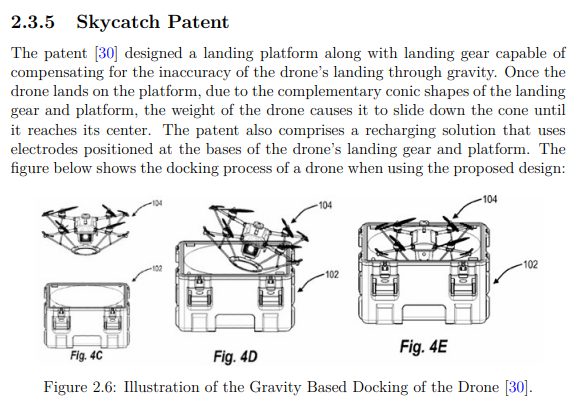
1. 설계 개념
상보적 절-두각형(cone + landing gear) 구조로, 드론 다리와 로버 상단 콘이 서로 “맞물려” 중력만으로 오정렬을 교정하는 패시브(Self-centering) 방식이다. 초기 30 ° 설계는 교정력이 부족해 45 °로 변경되었다 .
45 °로 바꾸자 FDM 3D 프린터용 지지재가 51 % → 4 %(93 %↓)로 줄고, 총 인쇄 시간도 35 % 단축되었다 . 덕분에 경량·저가·신속 제작이 가능하다.
2. 허용 착륙 오차
Gazebo-기반 시뮬레이션에서 최대 ±5 cm의 수평 위치 오차와 ±10 °의 기체 기울기를 보정할 수 있음이 확인됐다 . 이는 카메라 기반 비전-랜딩 알고리즘이 확보해야 할 목표 정확도를 결정한다.
3. 전력·통신 인터페이스
| 항목 | 방식 | 이유 |
|---|---|---|
| 충전 | 24 V 접촉식 전극 | - 무선 충전 효율(≈ 65 %) 대비 >90 % 고효율- 구조 단순, 이동형 FIXIT 로버에 적합 |
| 유선 I/O | W5500 Ethernet | 실험·정비 시 고속 로그, BMS 상태, 펌웨어 업데이트용 |
| 무선 I/O | MAVLink(2.4/5 GHz Wi-Fi 등) | 실제 임무 중 원격 제어·텔레메트리 담당 |
W5500 Ethernet 모듈의 설계 목적
보드에는 W5500, MAC-EEPROM(24AA02E48) 그리고 RJ-45 커넥터로 구성된 전용 Ethernet 섹션이 포함돼 있습니다. 두 인터페이스(트랜스포머로 절연된 Media Interface + uC와의 SPI)로 동작합니다.
블록다이어그램에서도 “Ethernet module → uC와의 통신용” 으로 명시돼 있어, 사용자가 로버/드론 시스템을 케이블로 직접 접속해 상태 확인·펌웨어 업데이트·배터리 관리 CLI 등을 실행할 수 있도록 설계됐습니다.
펌웨어 측면에서도 EthernetServer TcpServer(3001) 를 초기화해 로컬 TCP 서버를 띄워두고, CLI 명령·센서 데이터 등을 주고받도록 구현돼 있습니다.
➜ 즉, 도킹 스테이션에 로버가 물려 있거나 실험-벤치 상황에서 안정적·고속으로 데이터를 주고받기 위한 “Service/Debug용 유선 백본”에 가깝습니다.

실제 비행-임무 시 통신 계층
드론 쪽 비행 컨트롤러(PX4)는 Ground Control Station(QGC) 와 MAVLink 프로토콜로 명령·텔레메트리를 주고받도록 구성돼 있습니다. 논문에서는 물리 매체를 구체적으로 못 박지는 않았지만, MAVLink 링크는 관례적으로 2.4 / 5 GHz Wi-Fi, SiK Radio, 900 MHz 장거리 모뎀 등 무선으로 운용됩니다.
왜 두 가지 인터페이스를 모두 넣었을까?
| 구분 | 사용 시점 | 장점 | 비고 |
|---|---|---|---|
| W5500 Ethernet | 개발·실험, 로버가 드론을 충전 중일 때 | • 지터 없는 고속 로그 수집• 펌웨어/EEPROM 업데이트• BMS·Gauge 실시간 모니터링 | RJ-45 연결 필요 |
| 무선 MAVLink | 드론 비행·탐사·산업 현장 | • 케이블 없이 장거리 제어• GCS·ROS2 등과 실시간 데이터 교환 | 전용 Telemetry 모듈 또는 Wi-Fi AP 필요 |