
WIZnet-PICO-C Docker Build System
A cross-platform, Docker-based build system for WIZnet Ethernet boards with RP2040/RP2350.
WIZnet-PICO-C Docker 빌드 시스템
RP2040/RP2350 기반 WIZnet 이더넷 보드를 위한 크로스 플랫폼 Docker 빌드 시스템
목차
개요
문제점
WIZnet 이더넷 보드용 펌웨어를 빌드하려면 전통적으로:
- Pico SDK 및 의존성 설치 필요
- 툴체인 설정 (arm-none-eabi-gcc)
- 여러 라이브러리 버전 관리
- 플랫폼별 빌드 스크립트 작성
이는 초보자에게 진입 장벽이 되고, 환경 설정에 시간을 낭비하게 합니다.
해결책
WIZnet-PICO-C Docker 빌드 시스템은 다음을 제공합니다:
- 한 번의 명령으로 빌드: 수동 설정 불필요
- 크로스 플랫폼: Windows, Linux, macOS 지원
- 격리된 환경: Docker 컨테이너로 충돌 방지
- 성능 최적화: tmpfs + ccache로 빠른 빌드
지원 하드웨어
10종 보드:
- WIZnet Ethernet HAT (W5100S)
- W5100S-EVB-Pico
- W5500-EVB-Pico ← 권장
- W55RP20-EVB-Pico (이더넷 내장 SiP)
- W6100-EVB-Pico (IPv6)
- W6300-EVB-Pico (QSPI)
- W5100S-EVB-Pico2 (RP2350)
- W5500-EVB-Pico2 (RP2350)
- W6100-EVB-Pico2 (RP2350)
- W6300-EVB-Pico2 (RP2350)
16종 예제:
- 기본: loopback, udp, http, tcp_server_multi_socket
- 프로토콜: dhcp_dns, sntp, mqtt, tftp, netbios, pppoe, upnp
- 보안: tcp_client_over_ssl, tcp_server_over_ssl
- 고급: udp_multicast, can, network_install
주요 특징
🚀 빠른 빌드 성능
- tmpfs: RAM에 빌드 디렉토리 생성 (20GB)
- ccache: 컴파일 캐시 (재빌드 시 100% 적중)
- 병렬 빌드: 16개 동시 작업
🌐 크로스 플랫폼
- Windows: PowerShell 스크립트 (build.ps1)
- Linux: Bash 스크립트 (build.sh)
- macOS: Bash 스크립트 (build.sh)
👥 사용자 친화적
- Interactive 모드: 초보자를 위한 안내 UI
- 명령줄 모드: 고급 사용자를 위한 빠른 빌드
- 단일 예제 빌드: 필요한 것만 빌드
🔧 고급 기능
- CleanOutput: 전체 클린 없이 빠른 재빌드
- 호스트 examples: 호스트에서 예제 편집, 컨테이너에서 빌드
- 자동 초기화: 서브모듈 자동 처리
시작하기
사전 요구사항
필수:
- Docker Desktop (Windows/macOS) 또는 Docker Engine (Linux)
- Git
- 20GB 여유 RAM (tmpfs용)
- 5GB 여유 디스크 공간 (ccache용)
선택:
- Windows: PowerShell 5.1+ (Windows 10/11에 기본 설치)
- Linux/macOS: Bash 4.0+
설치
1단계: Docker 설치
Windows/macOS: Docker Desktop에서 다운로드
Linux (Ubuntu/Debian):
sudo apt-get update
sudo apt-get install docker.io
sudo usermod -aG docker $USER
# 로그아웃 후 다시 로그인2단계: 저장소 클론
git clone https://github.com/your-username/wiznet-pico-c-docker.git
cd wiznet-pico-c-docker3단계: Docker 확인
# Windows
docker --version
# Linux/macOS
docker --version사용법 - Interactive 모드
Interactive 모드는 초보자를 위한 안내 UI를 제공합니다.
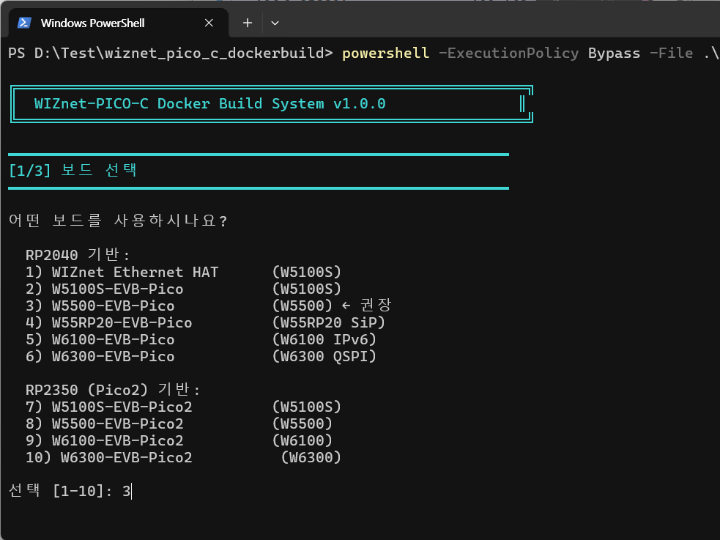
1단계: Interactive 모드 실행
Windows:
powershell -ExecutionPolicy Bypass -File .\build.ps1 -InteractiveLinux/macOS:
./build.sh -i2단계: 보드 선택
시스템이 10종의 지원 보드를 표시합니다:
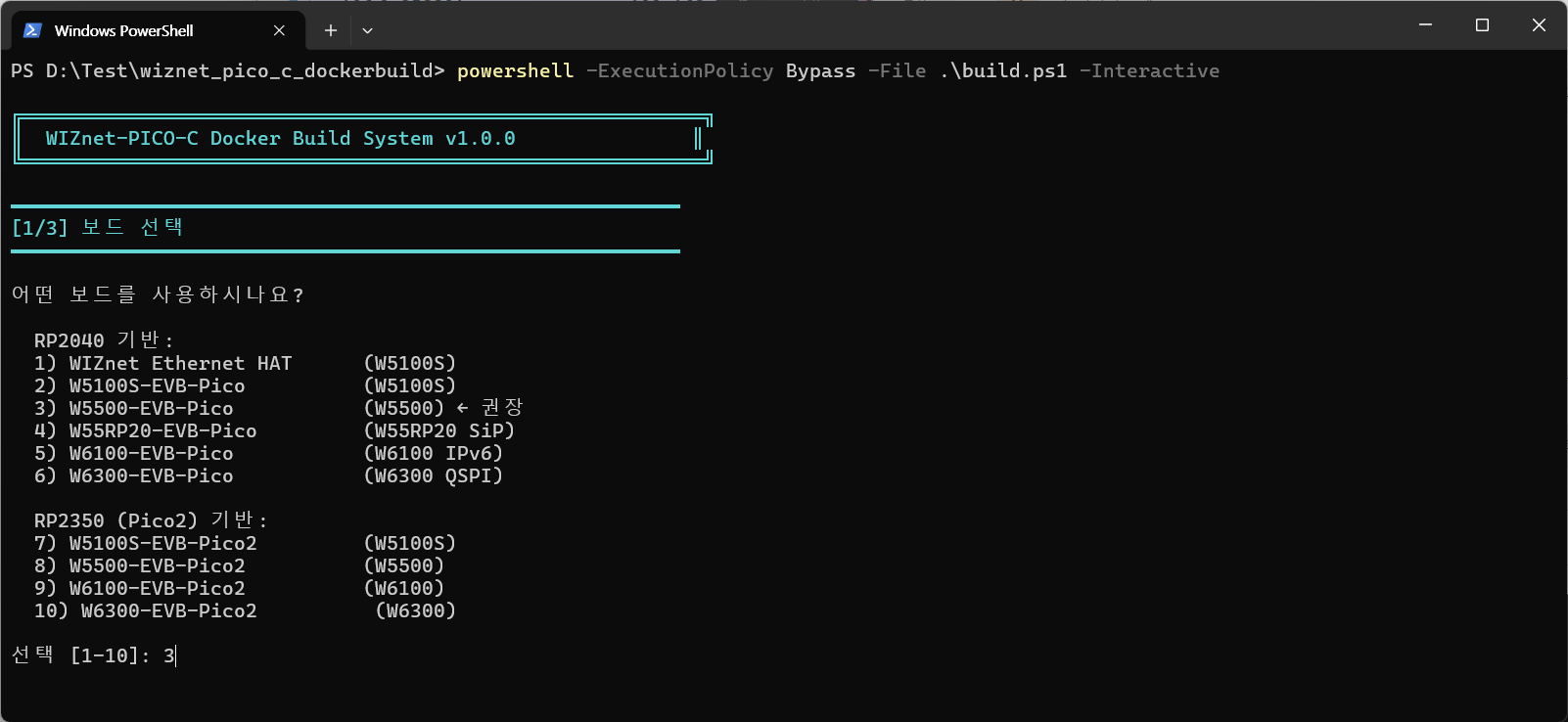
예시:
- W5500-EVB-Pico를 위해
3선택 (권장)
3단계: 예제 선택
난이도 별표(⭐)가 표시된 16종 예제 중 선택:
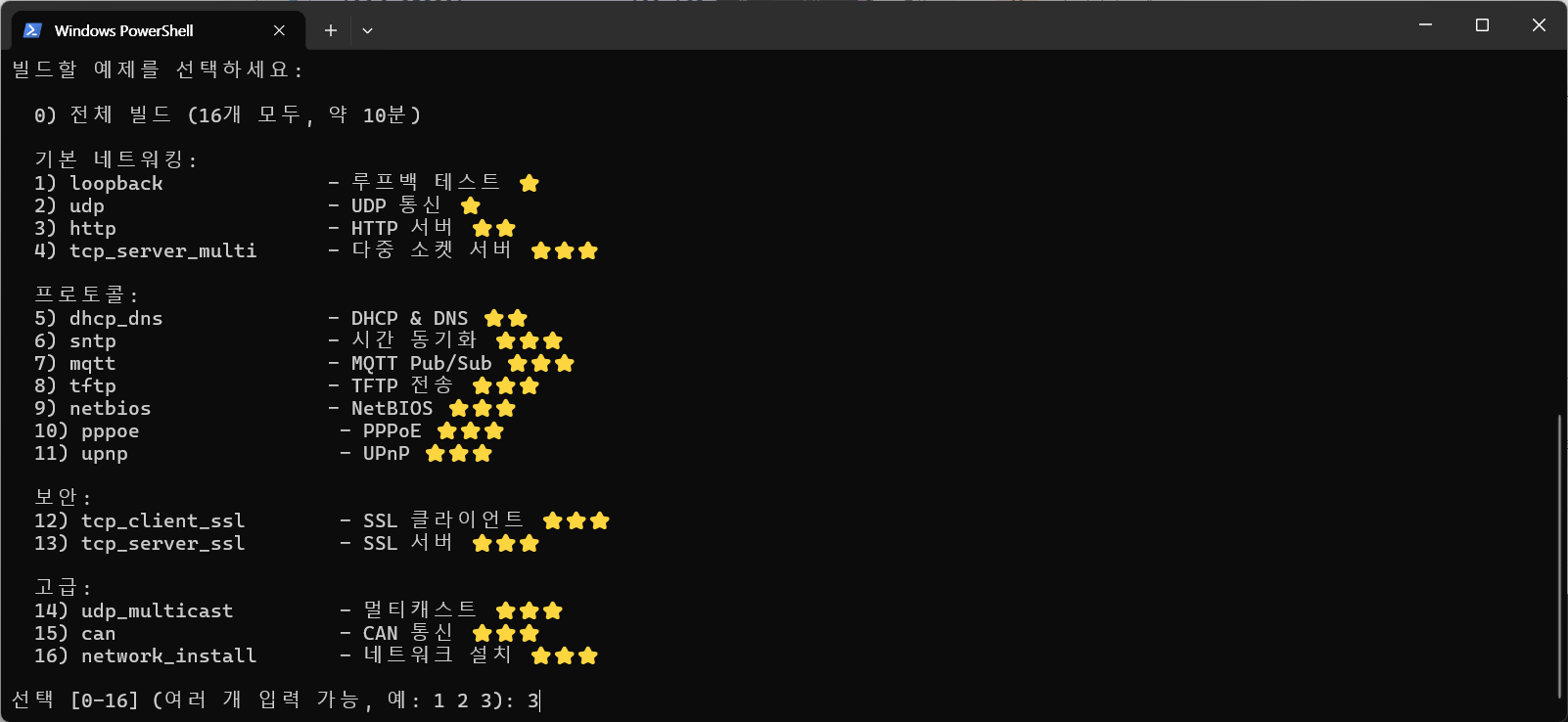
옵션:
0: 전체 16개 예제 빌드 (약 10분)1-16: 특정 예제 빌드- 다중 선택:
1 2 3(loopback, udp, http 빌드)
예시:
- HTTP 서버를 위해
3선택 (⭐⭐ 난이도)
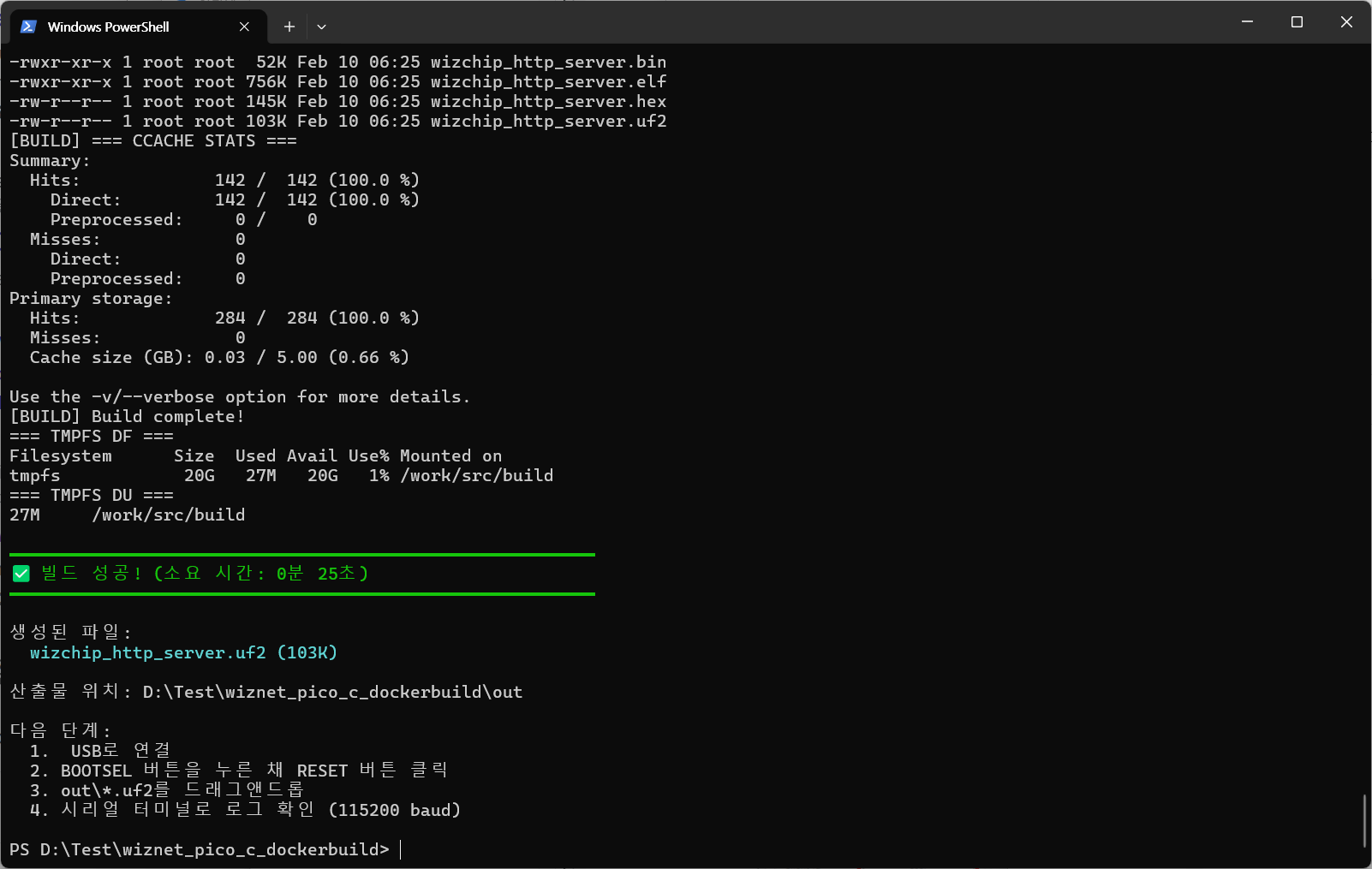
4단계: 빌드 완료
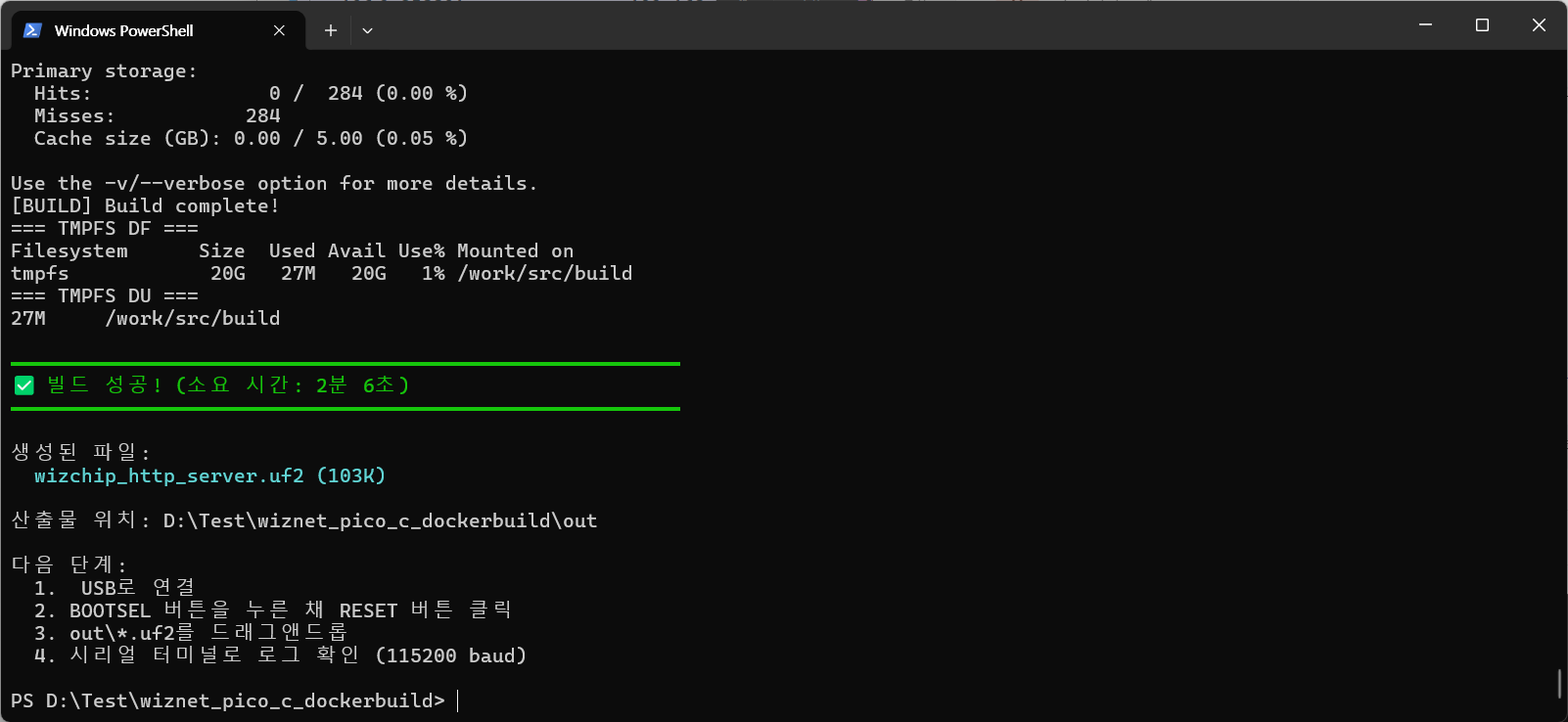
빌드 결과:
- 빌드 시간: 2분 6초
- 출력:
wizchip_http_server.uf2(103KB) - 위치:
out/디렉토리 - tmpfs 사용량: 27MB
다음 단계:
- W5500-EVB-Pico를 USB로 연결
- BOOTSEL 버튼을 누른 채 RESET 버튼 클릭
out/wizchip_http_server.uf2를 드래그앤드롭- 시리얼 터미널 열기 (115200 baud)
사용법 - 명령줄 모드
명령줄 모드는 고급 사용자를 위한 빠른 빌드를 제공합니다.
전체 예제 빌드
Windows:
powershell -ExecutionPolicy Bypass -File .\build.ps1 -Board W5500_EVB_PICO -AllLinux/macOS:
./build.sh -b W5500_EVB_PICO -a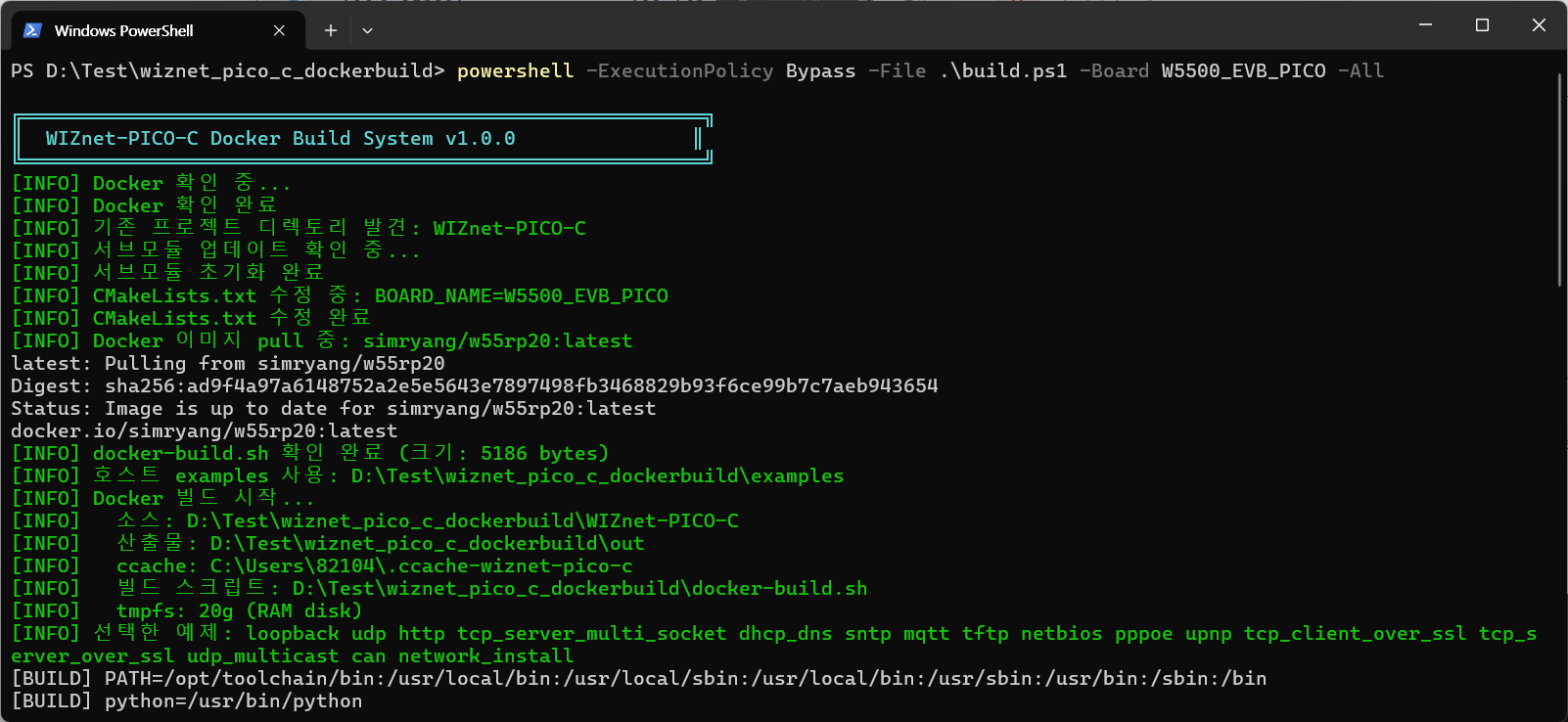
빌드 진행:
- Docker 이미지 pull:
simryang/w55rp20:latest - 서브모듈 초기화
- CMake 설정
- Ninja 빌드 (16 병렬 작업)
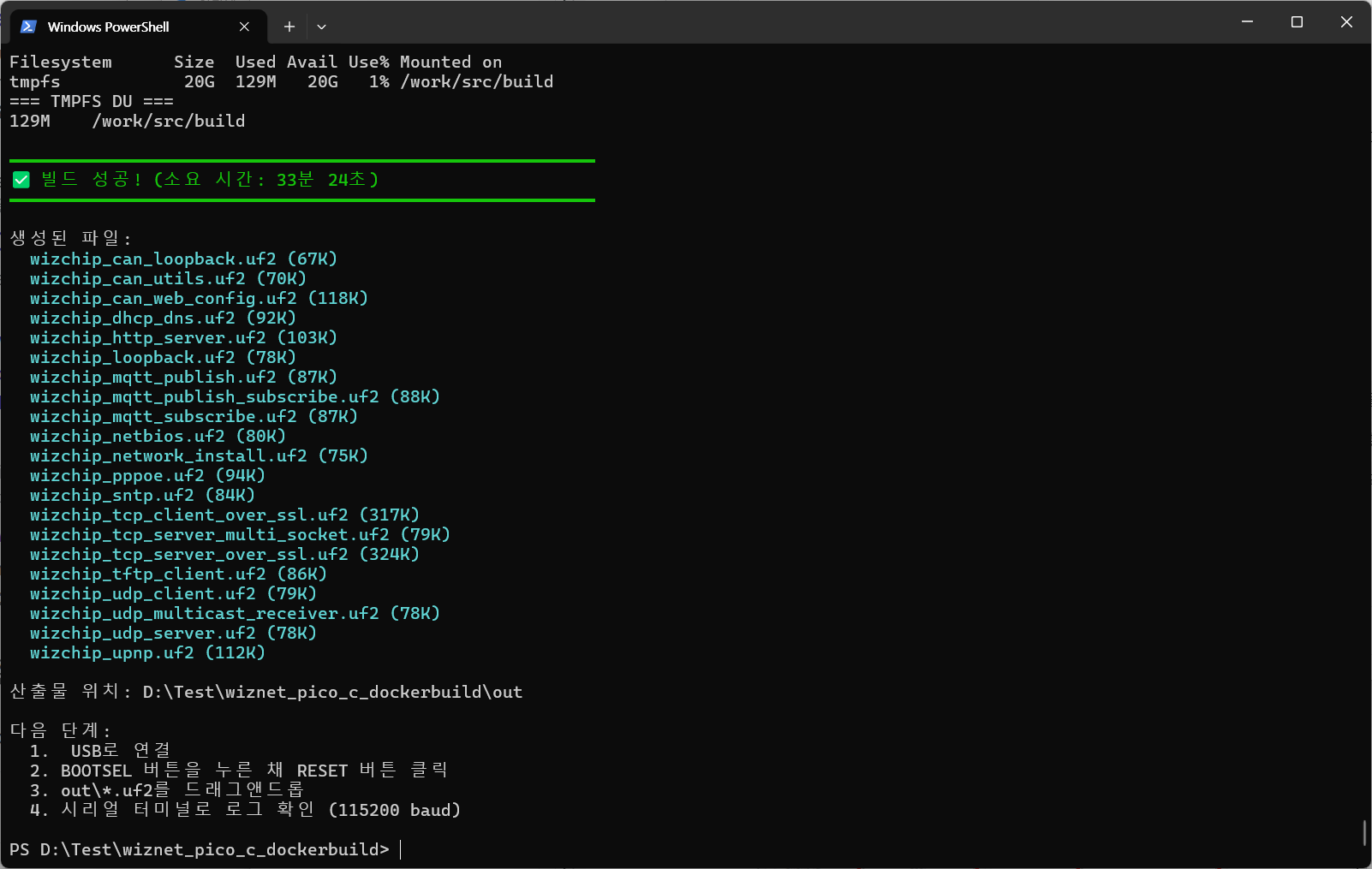
빌드 결과:
- 빌드 시간: 33분 24초
- 출력: 16개 예제, 총 20개 .uf2 파일
- tmpfs 사용량: 129MB (최대)
단일 예제 빌드
Windows:
powershell -ExecutionPolicy Bypass -File .\build.ps1 -Board W5500_EVB_PICO -Example httpLinux/macOS:
./build.sh -b W5500_EVB_PICO -e http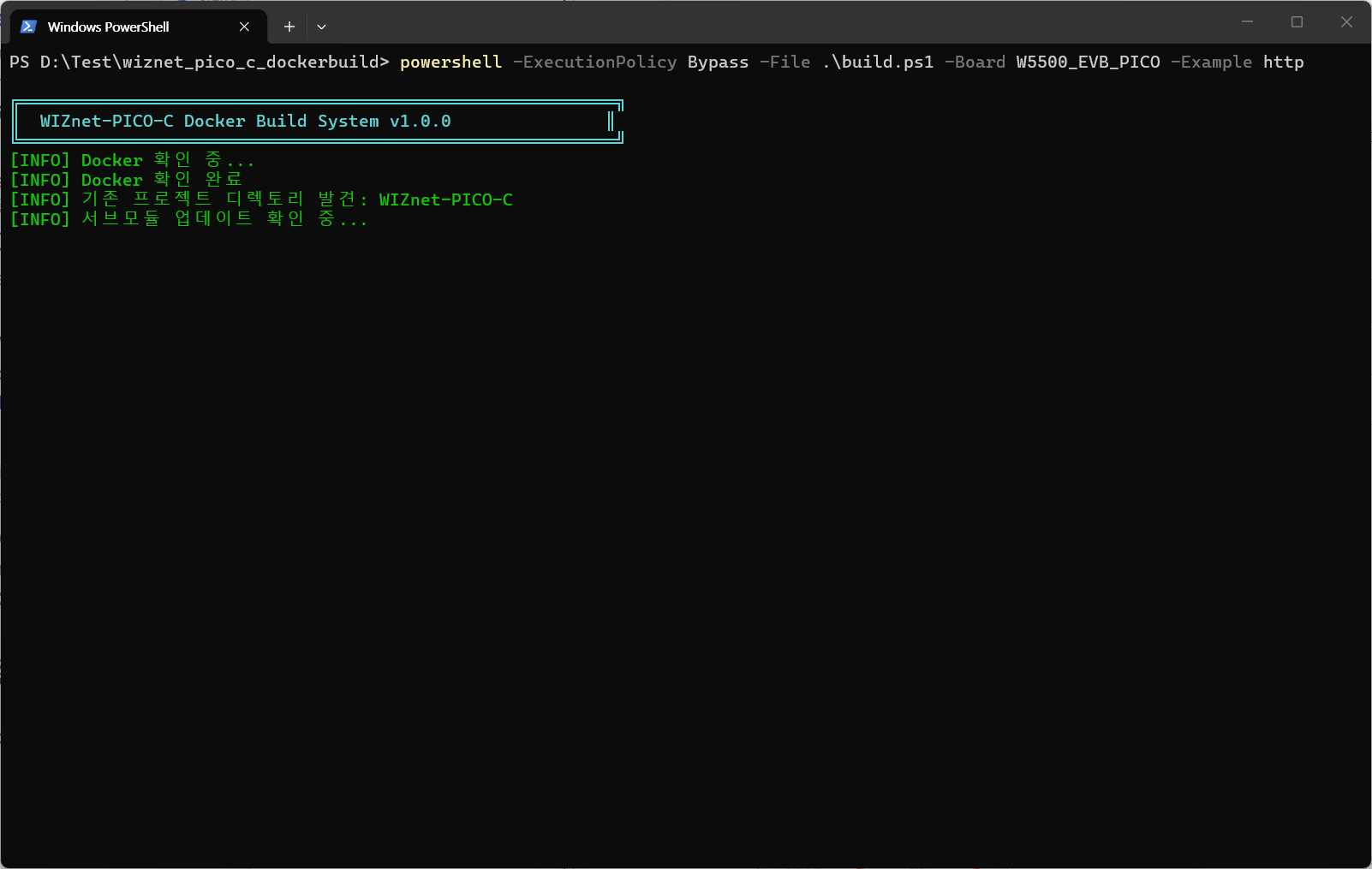
HTTP 예제만 빌드:
- 타겟:
wizchip_http_server - 다른 예제는 빌드하지 않음
여러 예제 빌드
Windows:
powershell -ExecutionPolicy Bypass -File .\build.ps1 -Board W5500_EVB_PICO -Example "http mqtt"Linux/macOS:
./build.sh -b W5500_EVB_PICO -e "http mqtt"빌드 결과:
wizchip_http_server.uf2wizchip_mqtt_publish.uf2wizchip_mqtt_publish_subscribe.uf2wizchip_mqtt_subscribe.uf2
성능 최적화
ccache: 100% 캐시 적중
동일한 코드를 재빌드할 때, ccache는 거의 즉시 컴파일을 제공합니다.
성능 비교:
| 빌드 타입 | 첫 빌드 | 재빌드 (ccache) | 속도 향상 |
|---|---|---|---|
| 단일 예제 (http) | 2분 6초 | 25초 | 5배 빠름 |
| 전체 예제 | 33분 24초 | ~2-3분 | 11배 빠름 |
ccache 통계:
- 적중: 142 / 142 (100%)
- 캐시 크기: 0.03GB / 5.00GB (0.66%)
- tmpfs 사용량: 27MB (단일 예제)
tmpfs: RAM 기반 빌드
RAM(tmpfs)에서 빌드하는 것이 디스크보다 훨씬 빠릅니다:
tmpfs vs 디스크:
- tmpfs (RAM): ~2분 (단일 예제)
- SSD: ~3-4분
- HDD: ~5-8분
tmpfs 설정:
- 크기: 20GB (설정 가능)
- 마운트:
/work/src/build - 빌드 후 자동 정리
고급 기능
CleanOutput: 빠른 재빌드
일반 clean은 모든 것을 삭제하여 33분 재빌드가 필요합니다.
CleanOutput은 빌드 출력만 삭제하고 빌드 캐시를 보존합니다:
Windows:
powershell -ExecutionPolicy Bypass -File .\build.ps1 -CleanOutputLinux/macOS:
./build.sh -co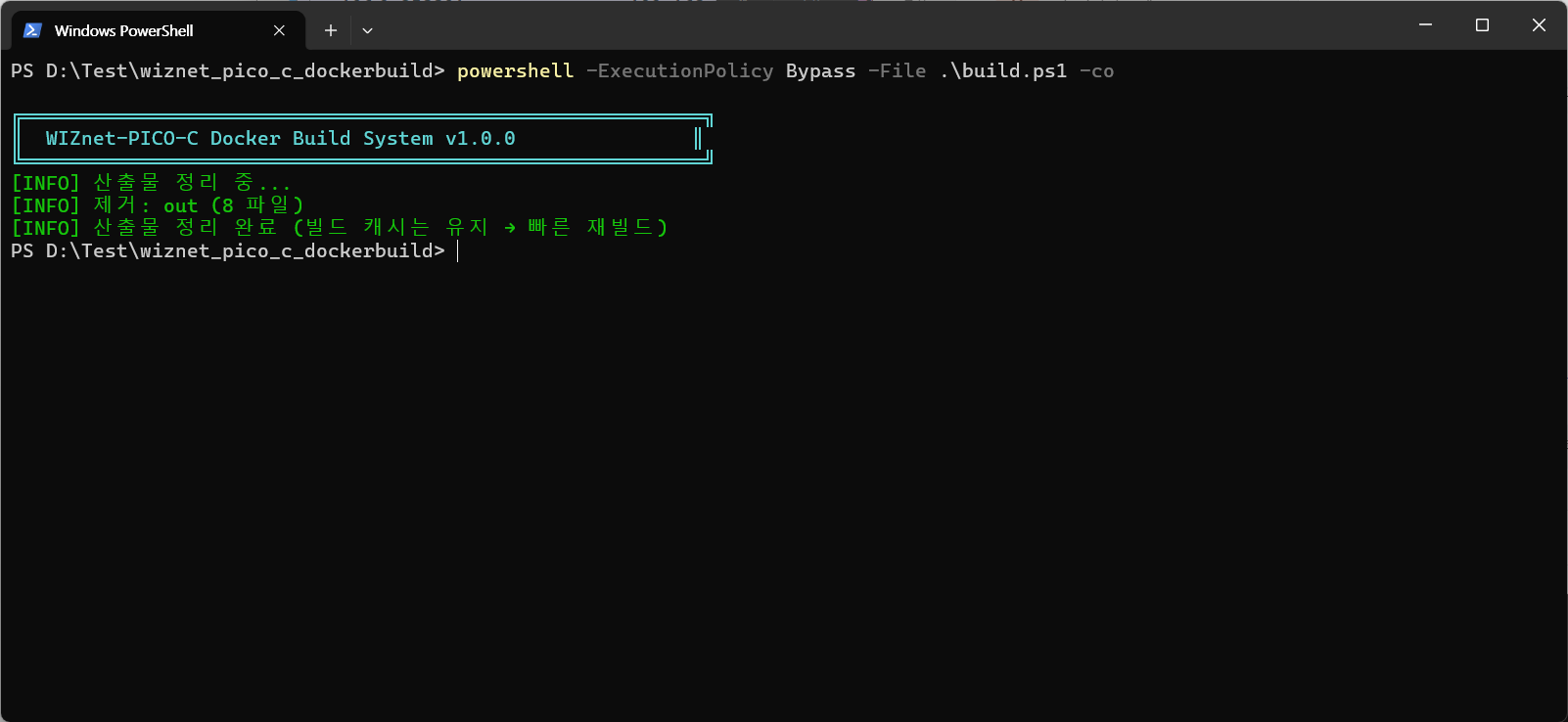
결과:
- 삭제:
out/디렉토리 (8개 파일) - 보존:
WIZnet-PICO-C/build/(CMake 캐시) - 다음 빌드: 33분 대신 1-2분
사용 사례:
- 다른 보드 테스트
- Debug/Release 빌드 전환
- 디스크 공간 정리
호스트 Examples: 편집 및 빌드
전체 저장소를 포크하는 대신, examples를 호스트로 복사:
1단계: Examples 초기화
Windows:
powershell -ExecutionPolicy Bypass -File .\build.ps1 -InitExamplesLinux/macOS:
./build.sh --init-examplesWIZnet-PICO-C/examples/를 ./examples/로 복사합니다.
2단계: Examples 편집
vi ./examples/http/w5x00_http_server.c
# 코드 수정3단계: 수정된 Examples로 빌드
Windows:
powershell -ExecutionPolicy Bypass -File .\build.ps1 -Board W5500_EVB_PICO -AllLinux/macOS:
./build.sh -b W5500_EVB_PICO -a빌드 시스템이 자동으로 ./examples/를 컨테이너에 마운트하여 수정된 코드를 사용합니다.
장점:
- 서브모듈 관리 불필요
- 쉬운 버전 관리 (Git)
- 빠른 반복 개발
성능 분석
CPU 활용률
Docker 빌드 시스템이 모든 CPU 코어를 효율적으로 활용합니다.
테스트 환경:
- CPU: AMD Ryzen 7 5700G (8코어, 16스레드)
- RAM: 32GB
- OS: Windows 11
빌드 전: 유휴 상태
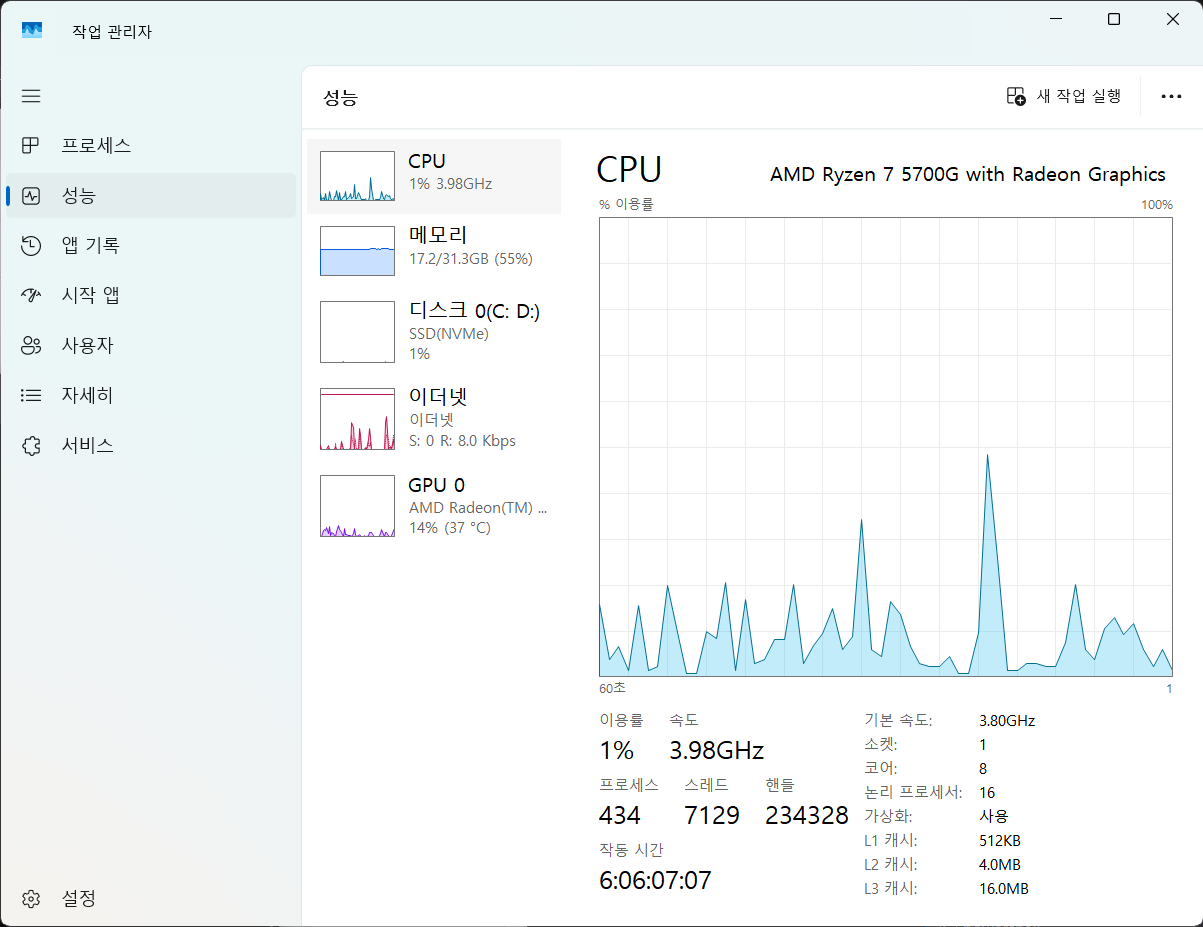
측정값:
- CPU 사용률: 1%
- 클럭 속도: 3.98GHz
- 프로세스: 434
- 스레드: 7129
빌드 중: 전체 부하
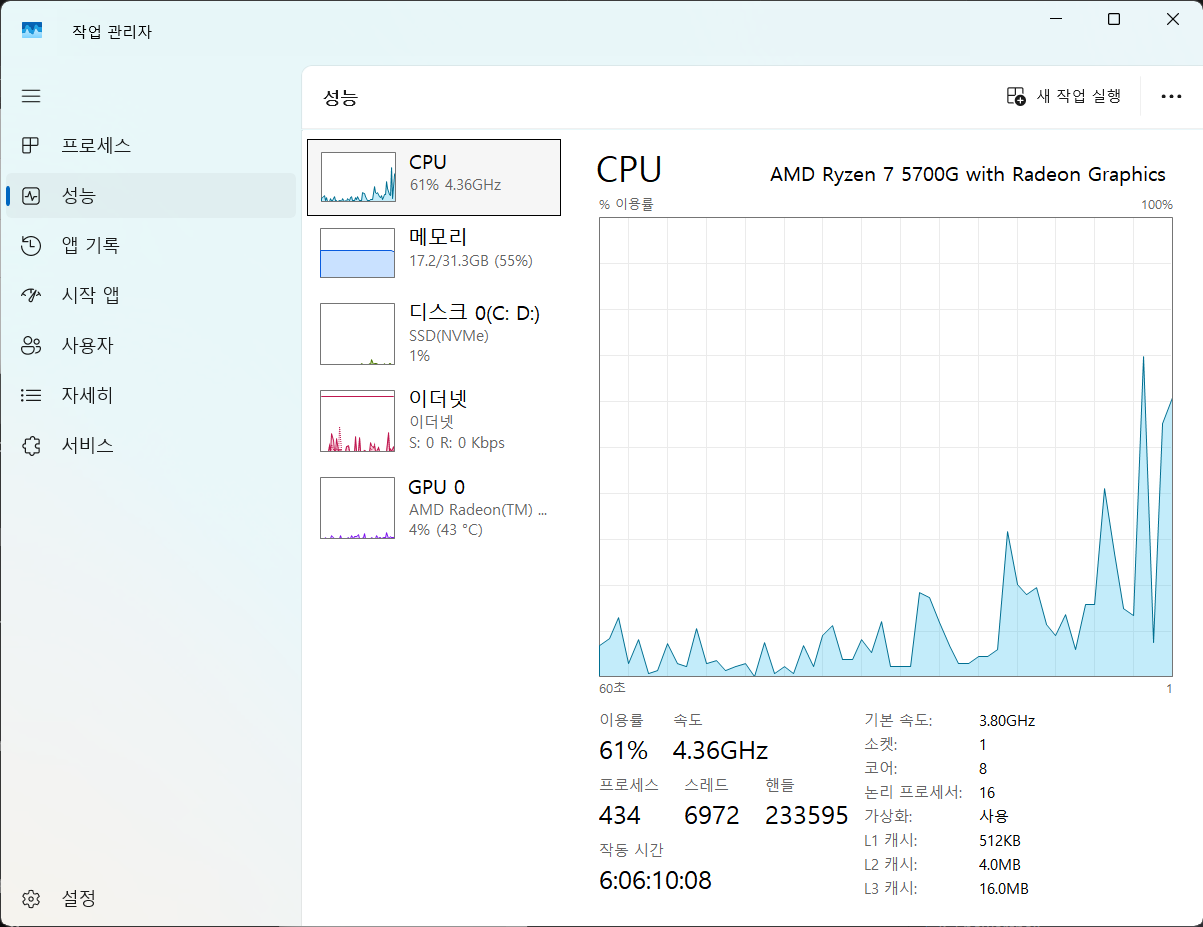
측정값:
- CPU 사용률: 61% (최대)
- 클럭 속도: 4.36GHz (부스트)
- 16개 스레드 모두 활용
- Ninja 병렬 빌드:
-j 16
빌드 성능:
- 단일 코어: ~20분
- 16코어: 2-3분 (ccache 활성화)
- 병렬 효율: ~85%
빌드 특성
CPU 사용 패턴:
- CMake 설정: 낮은 CPU (단일 스레드)
- Ninja 컴파일: 높은 CPU (병렬)
- 링킹: 중간 CPU (제한적 병렬화)
권장사항:
- 4코어 CPU: 양호 (8-10분 빌드)
- 8코어 CPU: 우수 (2-3분 빌드)
- 16코어 CPU: 최적 (ccache로 1-2분 빌드)
문제 해결
일반적인 문제
문제 1: Docker 미실행
오류:
Error: Docker daemon not running해결:
- Windows/macOS: Docker Desktop 실행
- Linux:
sudo systemctl start docker
문제 2: 권한 거부 (Linux)
오류:
permission denied while trying to connect to the Docker daemon해결:
sudo usermod -aG docker $USER
# 로그아웃 후 다시 로그인문제 3: 메모리 부족
오류:
ninja: fatal error: fork: Cannot allocate memory해결:
- tmpfs 크기 줄이기:
build.sh또는build.ps1편집 TMPFS_SIZE=20g를TMPFS_SIZE=10g로 변경- 또는 병렬 작업 수 줄이기:
JOBS=8
문제 4: 서브모듈 미초기화
오류:
Pico SDK submodule not initialized!해결: 빌드 시스템이 자동으로 처리합니다. 실패할 경우:
cd WIZnet-PICO-C
git submodule update --init --recursive
cd ..문제 5: 빌드 타겟을 찾을 수 없음 (Windows)
오류:
ninja: error: unknown target 'wizchip_udp_multicast_sender'해결: 최신 버전으로 업데이트:
git pull타겟 매핑 버그가 수정되었습니다 (커밋 4feccb6).
도움 받기
향후 계획
Python 통합 (계획됨)
build.ps1과 build.sh 간의 코드 중복을 제거하기 위해 계획 중:
1단계: Python 스크립트
- 모든 플랫폼을 위한 단일
build.py build.ps1/build.sh는 얇은 래퍼로- Python 3.6+ 필요 (Docker 사용자에게 표준)
2단계: PyInstaller 바이너리 (선택)
build.exe(Windows)build(Linux)build(macOS)- Python 설치 불필요
장점:
- 단일 코드베이스 유지
- 기능 추가가 쉬움
- 크로스 플랫폼 일관성 향상
자세한 내용은 FUTURE_PLAN_PYTHON_INTEGRATION.md 참조.
계획된 기능
- GitHub Actions 통합 (CI/CD)
- 모든 보드를 위한 사전 빌드 Docker 이미지
- 원격 빌드를 위한 웹 UI
- 커스텀 보드 지원
- FreeRTOS 예제 통합
결론
WIZnet-PICO-C Docker 빌드 시스템은 WIZnet 이더넷 보드용 펌웨어 개발을 단순화합니다:
✅ 설정 불필요: Docker가 모든 것을 처리 ✅ 빠른 빌드: tmpfs + ccache = 25초 ✅ 크로스 플랫폼: Windows, Linux, macOS ✅ 사용자 친화적: 초보자를 위한 Interactive 모드 ✅ 유연함: 단일 또는 전체 예제
시작하기:
git clone https://github.com/your-username/wiznet-pico-c-docker.git
cd wiznet-pico-c-docker
./build.sh -i # Linux/macOS질문이 있으신가요?
- 문서: README.md
- 이슈: GitHub Issues
저자
구현/리눅스 환경 테스트/글 내용 작성 : Joseph
윈도우 환경 테스트/실행 이미지 수집 : Aimee
-
wiznet_pico_c_dockerbuild
