
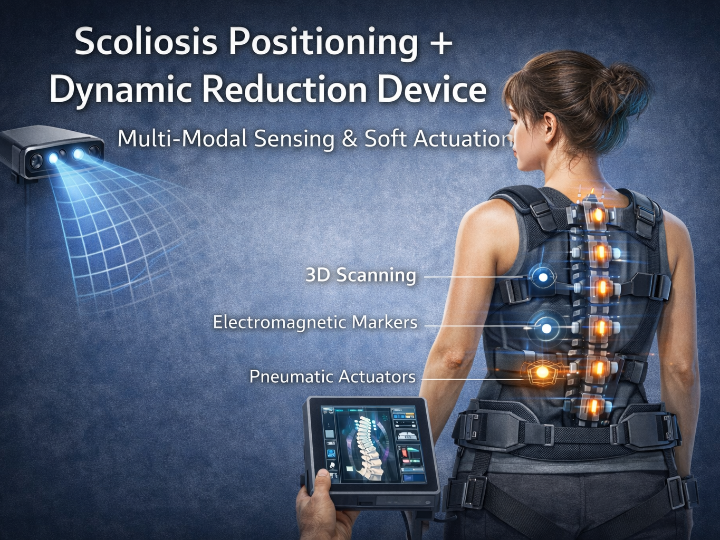
Scoliosis Positioning + Dynamic Reduction Device with Multi-Modal Sensing and Soft Actuation
Multi-sensor scoliosis correction device using spine pressure/strain + 3D scan + EM markers to plan and apply pneumatic force with magnetic assist.
Overview
This device targets a common failure mode in scoliosis correction: “knowing where to push” and “how much to push” is often estimated from limited measurements and clinician experience, while rigid mechanisms can overconstrain or discomfort the patient. It proposes (1) richer positioning data and (2) softer, more controllable force application, coordinated by an intelligent control module.
Main Content
What the system is
The device is organized into four modules:
- Accurate positioning module (spinal biomechanical sensing array, 3D optical scanning cameras, electromagnetic positioning mark patches)
- Balance reduction module (partitioned flexible pneumatic actuators + magnetic control balance correction components)
- Support fixing module (self-adaptive pelvis fixing frame, shoulder sling, spine-attaching support plate)
- Intelligent control module (acquires positioning data, generates a reduction scheme, drives actuators and adjustments)
Core difference vs. common approaches
The key structural difference is multi-modal positioning plus closed-loop capable actuation coordination:
- Instead of a single positioning mode (only optical scan or only pressure), it combines pressure/strain along the spine, 3D surface/shape capture, and marker-based calibration to reduce ambiguity in locating deformity segments.
- Instead of rigid pushing structures, it emphasizes flexible pneumatic force with a magnetic assist component to shape correction forces while aiming to reduce discomfort from rigid contact.
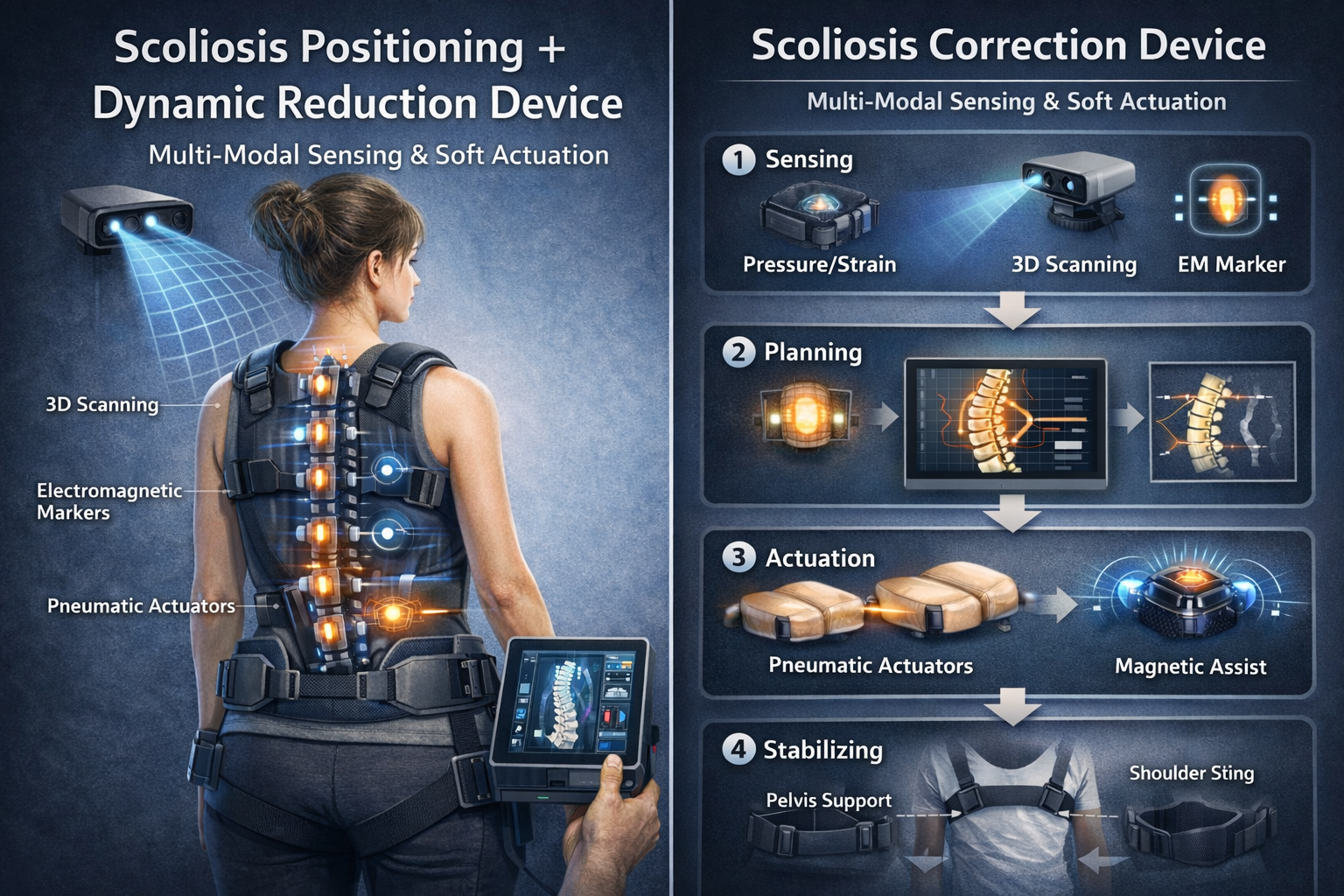
Data-to-action loop (conceptual)
- Sense: distributed pressure/strain data + 3D scan + marker data feed the control module.
- Plan: the control module derives “lateral bending section” information and generates an individualized reduction scheme.
- Actuate: pneumatic actuators apply flexible reduction force; magnetic components provide auxiliary force and angle-adjustable influence.
- Constrain: pelvis/shoulder/spine supports limit compensatory displacement during correction.
System Context
This reads like a therapy/clinical assistance device intended to improve repeatability and safety of conservative correction workflows by standardizing data capture and force application. It positions “intelligent control” as the coordinator that turns measurement into an actionable, adjustable plan rather than a one-shot manual adjustment.
Architecture / Design Considerations
- Sensor fusion validity: combining modalities only helps if cross-calibration is stable; the marker patches are explicitly described as complementary calibration for 3D scan data.
- Actuation safety envelope: pneumatic pressure control and magnetic field adjustment imply a need for strict limits (pressure, rate-of-change, duration) to avoid harm. The design explicitly aims to avoid rigid-structure discomfort/damage by using flexible actuation.
- Fit across body sizes: the support module uses adjustable/self-adaptive structures (pelvis frame sliding/adjustment, shoulder sling, spine plate) to match different physiologies.
- Interfaces and wiring: sensors and camera connections are described via analog acquisition, network communication interfaces/ports, and communication buses, implying integration complexity inside the control module.
Possible Implications
- If the sensing and control loop is reliable, the device could improve consistency in non-surgical correction by reducing guesswork in segment identification and force selection.
- The soft-actuation approach suggests a tradeoff: potentially better comfort and compliance, but more dependence on control accuracy and calibration integrity.
Conclusion
This patent’s technical bet is straightforward: better positioning data + softer, controllable force application + adaptive fixation + centralized control yields safer and more repeatable scoliosis reduction compared with single-sensor, rigid-mechanism systems.
전체 개요
본 장치는 척추측만 교정에서 자주 발생하는 문제인 **“정확한 변형 구간 식별”**과 **“안전한 힘(교정력) 적용”**을 동시에 다루려는 구성으로 보입니다. 단일 센서나 단일 스캔 기반으로는 측만 구간의 3차원 변형을 충분히 설명하기 어렵고, 강체 기반 구동은 착용 불편 또는 손상 위험을 키울 수 있다는 문제의식이 깔려 있습니다.
문제의식과 기술적 맥락 재구성
- 기존 수기 도수 교정은 시술자 경험 의존도가 크고, 구간 판단 및 힘 조절이 흔들릴 수 있습니다.
- 기존 장비도 단일 포지셔닝(광학 스캔만, 압력만 등) 위주라 데이터가 불충분하고, 강체 구동 구조가 착용 적합도와 편안함을 해칠 수 있다는 비판이 명시되어 있습니다.
- 이 발명은 그 대안으로 **다중 데이터 취득(생체역학 + 3D + 마커)**과 유연 구동(공압 + 자기 보조), 그리고 지지/고정의 적응형 구조를 한 묶음으로 제안합니다.
기술 흐름 설명
1) 신호 / 데이터 취득
- 척추 생체역학 센싱 배열: 압력(압저항) + 변형(스트레인) 센서 조합을 척추 축 방향으로 분산 배치하고, 실시간 압력/변형 데이터를 수집합니다(인접 간격 3–5cm, 전송률 1Mbps 이상 언급).
- 3D 광학 스캐닝 카메라(복수): 쌍안(바이노큘러) 구조로 척추 영역을 스캔하고, 제어 모듈의 네트워크 포트/인터페이스로 연결됩니다.
- 전자기 포지셔닝 마크 패치: 인체 주요 위치에 부착되어 무선 주파수 대역으로 제어 모듈과 통신하며, 3D 스캔 데이터와 상호 보정(보완적 캘리브레이션)을 형성한다고 설명합니다.
2) 동작 계획 생성
- 지능 제어 모듈이 위 데이터로부터 측만(측굴) 구간 데이터를 획득하고, 이를 기반으로 개인화된 리셋(교정) 스킴을 생성합니다.
3) 힘(교정력) 적용
- 구간 분할 유연 공압 액추에이터가 척추 구간별로 배치되어 유연한 교정력을 가합니다(에어백, 압력 모니터링, 유량 제어기 포함).
- 자기 제어 보정 구성요소(영구자석 + 전자코일 + 각도 조절 브래킷)가 공압 액추에이터 내측과 흡착 결합 형태로 배치되어, 코일 전류로 자기장 강도를 조절하고 각도를 잠금/조절할 수 있다고 합니다.
4) 보조 고정 및 변위 억제
- 골반 고정 프레임(자기 적응형), 어깨 슬링, 척추 밀착 지지판이 교정 과정에서 **보상성 변위(원치 않는 이동)**를 제한하는 역할을 맡습니다.
왜 이런 구조가 나왔는지에 대한 해설
- 핵심은 “정밀 위치추정”을 단일 센서로 해결하려 하지 않고, 서로 약점이 다른 데이터원을 겹쳐서 구간 판단을 안정화하려는 점입니다(압력/변형은 내부 힘 상태에 강하고, 3D 스캔은 외형/형상에 강하며, 마커는 정합/보정에 도움).
- 구동부는 강체 대신 유연 공압을 전면에 두고, **자기력은 보조(force shaping / assist)**로 붙여 “세게 밀어 교정”이 아니라 “조절 가능한 힘으로 유도”하는 쪽에 무게가 실려 있습니다.
- 따라서 이 설계에서 자기 보정은 “주력 엔진”이라기보다 공압 기반 교정력을 미세 조정하거나 보조하는 수단으로 위치하는 편이 자연스럽습니다(문서에서 ‘magnetic control auxiliary force’로 표현).
설계 선택의 배경, 제약 조건, 대안 가능성
- (추론임) 공압을 주 구동으로 두면 착용감/순응도가 좋아질 수 있지만, 그만큼 압력 제어 안정성과 센서 캘리브레이션 의존도가 커집니다.
- (추론임) 3D 스캔 + 마커는 정합 품질을 올릴 수 있으나, 임상 환경에서는 조명/가림/체형/움직임에 의해 스캔 품질이 흔들릴 수 있어 “데이터 품질 평가 로직”이 중요해질 가능성이 있습니다.
- 대안으로는 (추론임) 3D 대신 IMU 기반 자세 추정, 또는 공압 대신 케이블 구동/모터 구동 등이 있을 수 있으나, 본 문서의 방향성은 “유연 접촉”을 유지하는 쪽에 더 맞춰져 있습니다.
생소한 개념에 대한 풀어쓴 설명
- 생체역학 센싱 배열: 척추를 따라 여러 지점에서 압력과 변형량을 동시에 읽어 “어느 구간에 힘이 얼마나 걸리는지”를 지도로 만드는 구성입니다.
- 구간 분할 액추에이터: 척추를 한 덩어리로 밀지 않고, 상부/중부/하부 등 구간별로 다른 힘을 주기 위해 액추에이터를 여러 그룹으로 나눈 것입니다.
- 자기 제어 보정: 영구자석에 전자코일을 조합해 자기장 강도를 조절하고, 각도까지 바꿔 보조 힘의 방향/세기를 다룬다는 발상입니다.
시스템 구성 및 선택지 해석
- 이 장치를 “교정 치료 전체”로 보면, **정밀 위치추정(데이터)**과 **교정력 구동(행동)**을 한 장치에 묶어 “측정-계획-수행” 루프를 만들려는 형태입니다.
- 하지만 임상적으로는 (추론임) 최종 판단과 적용은 의료진이 맡고, 장치는 보조 수단(정량화/재현성/안전한 힘 분배) 역할로 배치되는 편이 현실적입니다.
내부 관점에서의 시사점
기존 접근 대비 이 구조의 핵심 차이
- 단일 모드가 아니라 압력/변형 + 3D + 마커를 함께 써서 “구간 판단”의 불확실성을 줄이려는 점이 가장 큰 차이입니다.
이 시스템에서 실패 비용이 가장 큰 구간
- 가장 위험한 구간은 **“계획된 교정력을 실제로 적용하는 구동 제어 구간”**입니다. 잘못된 힘 크기/방향/시간 적용은 불편을 넘어 손상 위험으로 이어질 수 있고, 문서도 강체 구조로 인한 불편/손상 회피를 강조합니다.
- 그 다음 위험은 캘리브레이션 붕괴입니다(마커-스캔 정합 실패, 센서 드리프트 등). (추론임)
왜 이 설계가 보조 수단으로 위치하는지
- 자기 제어 구성요소는 문서에서 “보조 힘(auxiliary force)” 성격으로 설명되며, 공압 기반 교정력에 붙는 형태입니다. 즉, 주 구동은 공압이고 자기력은 보조로 보는 해석이 자연스럽습니다.
특정 구성요소 제거 시 시스템 성격 변화
- 3D 스캔 제거: 외형/형상 기반의 3차원 정보가 약해져, 포지셔닝이 다시 압력/변형 중심으로 쏠리고 단일 모드 문제에 가까워질 수 있습니다.
- 전자기 마크 패치 제거: 스캔-신체 좌표 정합 보정 축이 약해져, 다중 센서 융합의 이점이 줄어들 수 있습니다.
- 지능 제어 모듈 제거: 개인화 스킴 생성과 구동 제어가 무너져 “측정 장치 + 수동 조작”에 가까운 성격으로 바뀝니다.
- 공압 액추에이터 제거: 유연 접촉 기반의 교정력 적용이 사라져, 이 특허가 강조하는 “편안함/손상 회피” 축이 크게 약화됩니다.
FAQ
- 기존 장비 대비 가장 큰 차별점은 무엇인가요?
단일 센서/단일 스캔이 아니라 생체역학 센싱, 3D 스캔, 전자기 마크를 함께 사용해 구간 판단을 보강하는 점이 핵심입니다. 또한 공압 기반 유연 구동과 자기 제어 보조를 결합해 강체 구동의 불편/위험을 줄이려 합니다. - 왜 ‘구간 분할’ 구조(액추에이터 여러 그룹)가 필요하나요?
측만은 구간별 변형 양상이 다르기 때문에 한 덩어리 힘으로는 과교정 또는 보상성 변위가 생길 수 있습니다. 구간 분할은 부위별로 힘을 다르게 주고, 지지/고정 구조와 함께 원치 않는 이동을 억제하려는 의도입니다. - 데이터는 어떤 흐름으로 교정 동작으로 이어지나요?
센싱 배열, 3D 스캔, 마크 패치 데이터가 지능 제어 모듈로 들어가 측굴 구간 데이터를 만들고, 개인화 교정 스킴을 생성합니다. 그 스킴에 따라 공압 액추에이터와 자기 제어 보정부가 힘을 적용하고, 고정 모듈이 보상성 변위를 제한합니다. - 이 시스템에서 ‘보조 수단’으로 보는 구성요소는 무엇이고, 왜 그런가요?
자기 제어 보정부는 문서에서 보조 힘 성격으로 설명되며, 공압 액추에이터와 결합되어 동작합니다. 따라서 주된 교정력은 공압이 담당하고, 자기력은 보조로 힘의 형태/방향/강도 조절에 기여하는 그림이 됩니다. - 실패 비용이 가장 큰 판단 지점은 어디인가요?
교정력을 실제로 적용하는 구동 제어 구간이 가장 위험합니다. 힘이 과하거나 방향이 틀리면 불편을 넘어 손상 위험이 생길 수 있고, 문서도 강체 구조로 인한 불편/손상 회피를 주요 목표로 언급합니다. - 3D 스캔이나 마크 패치를 빼면 무엇이 달라지나요?
(추론임) 다중 센서 융합의 “정합/보정” 축이 약해져, 구간 판단이 다시 단일 모드에 가까워질 가능성이 있습니다. 결과적으로 개인화 스킴의 신뢰도가 흔들리면, 공압/자기 구동이 정밀하게 동작해도 목표 구간 자체가 틀어질 수 있습니다.
저자 정보 (Author Information)
- Chen Yan
- Qu Qing
- Wang Rui
- Wang Huang
- Zhang Haoyang
- (추론임) 공개된 정보가 제한적이지만, 임상(병원) 기반의 의료기기/재활 공학 협업 성격일 가능성이 있습니다.