
cluster-matrix42 – Lightweight Distributed Message-Passing Compute Framework in Rust
Rust-based distributed compute engine implementing message passing, master–worker scheduling, and parallel task execution
[PROJECT OVERVIEW]
cluster-matrix42 is a Rust implementation of a message-based distributed execution model.
Its objective is to reproduce the fundamentals of cluster computing in a lightweight, extensible form.
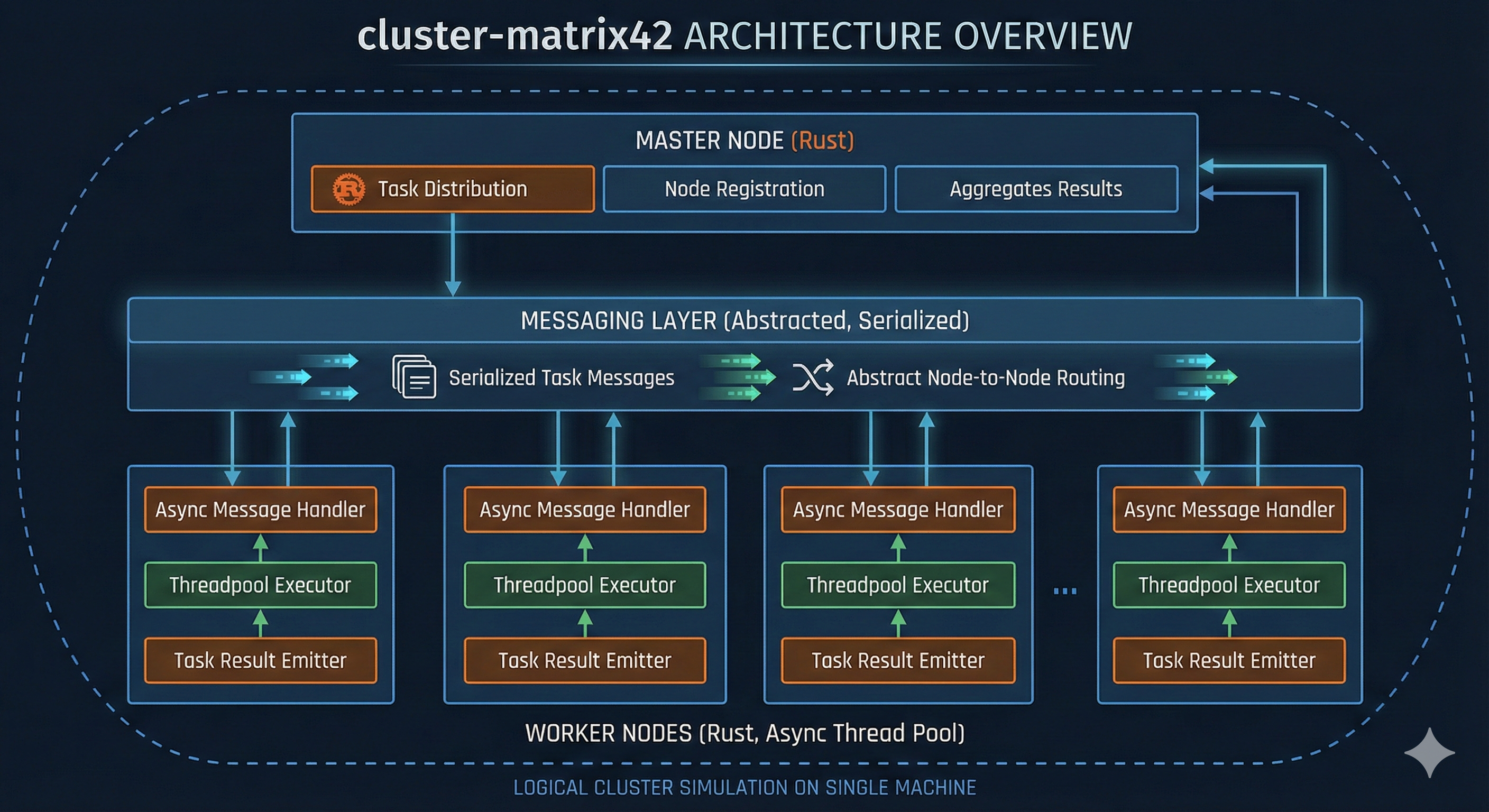
The system models:
- A Master Node responsible for distributing tasks, monitoring node states, and aggregating results.
- Multiple Worker Nodes that process tasks asynchronously using a thread pool.
- A messaging layer that abstracts node-to-node communication, allowing tasks and results to flow through serialized message structures.
This framework is not tied to hardware. It runs as a logical cluster on a single machine, simulating distributed environments used in HPC, IoT networks, and edge-AI systems. It provides an ideal platform for testing message scheduling, distributed orchestration, failure scenarios, and hybrid computation models.
[KEY FEATURES (as implemented by the creator)]
- Rust-based master–worker cluster implementation
- Message abstraction for task requests and responses
- Worker nodes executing tasks on multi-threaded pools
- Structured serialization for message payloads
- Simulation of multi-node clusters on a single machine
- Basic cluster scheduler logic with task dispatch and aggregation
- Extensible architecture suitable for domain-specific compute tasks
[TECHNICAL COMPOSITION]
Languages / Software Used
- Rust (core implementation)
- Systems concepts similar to actor-based Rust frameworks
Structure Overview (text diagram)
Technical Observations
- The project enforces clean separation of concerns:
messaging, scheduling, and execution are modular and extendable. - The worker model accurately reflects scalable HPC/edge compute engines.
- The abstraction allows painless extension to real hardware nodes, IoT devices, or network-enabled MCUs.
- Minimalism is a strength: the core mechanisms are understandable and hackable for experimentation.
[INDUSTRIAL & PRACTICAL RELEVANCE]
This project is directly relevant to fields where distributed computation or message-passing plays a central role:
- IoT mesh networks
- Edge computing clusters
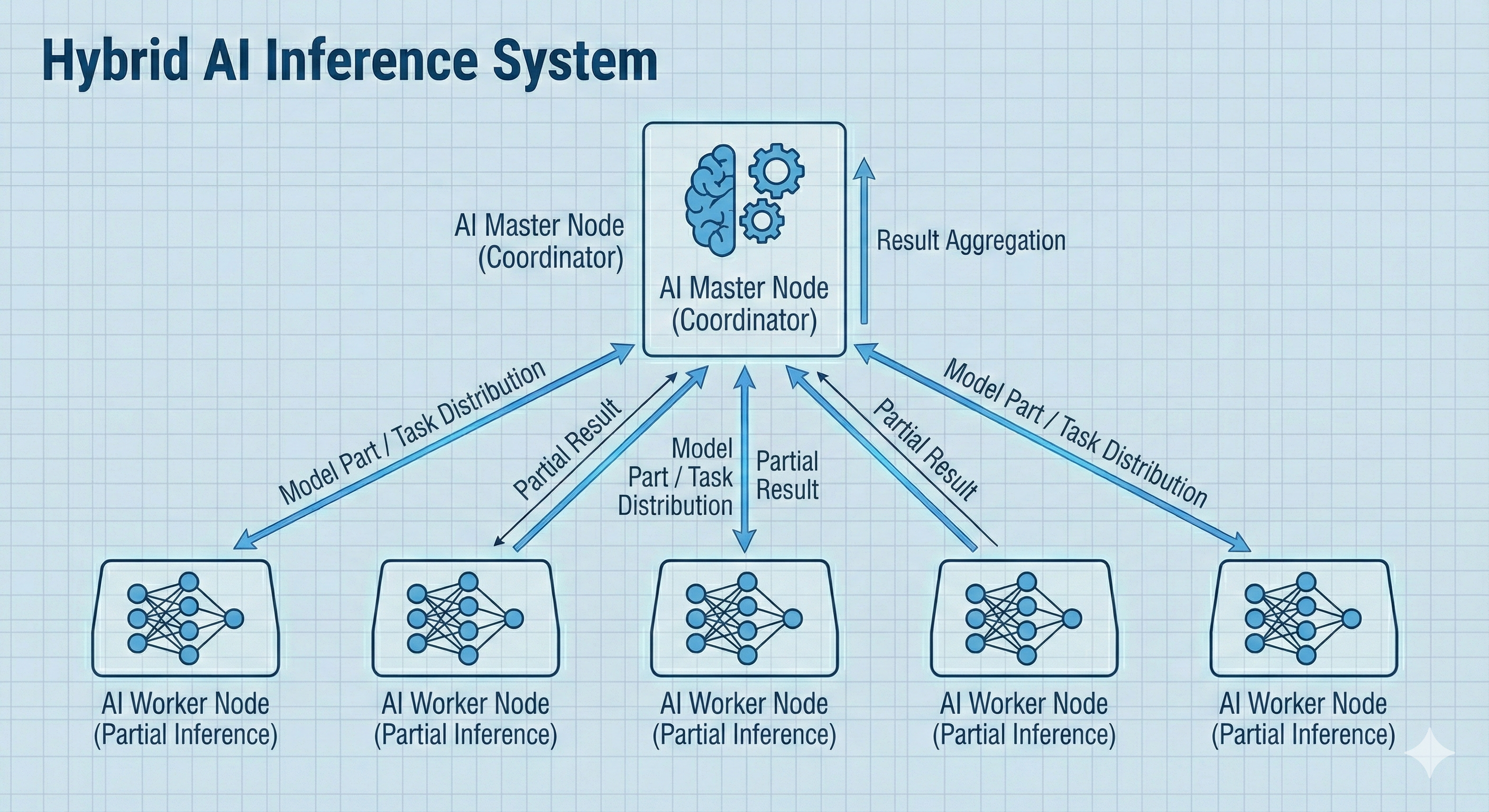
- Hybrid AI inference pipelines (multiple nodes producing partial results)
- Robotic systems with distributed sensor/compute nodes
- Simulation of multi-MCU clusters before physical deployment
- SCADA, Event-driven industrial orchestration systems
Comparative Analysis of Distributed System Architectures
| System Type | Data Flow Structure | Computation & Authority | Core Value (Why?) | Analogy |
|---|---|---|---|---|
| IoT Mesh Network | N:N (Many-to-Many)
Direct message relay between nodes | Interdependent
Pathfinding & delivery without a central node | Connectivity & Scalability
Eliminating dead zones & ensuring network survival | Spiderweb
(If one strand breaks, the path reroutes) |
| Edge Computing Cluster | Bottom-Up
Edge (Primary) → Center (Secondary) | Hierarchical Division
Edge: Filter/Detect / Center: Final Decision | Bandwidth Efficiency
Reducing noise; transmitting only critical info | Branch Reporting System
(Local resolution, HQ only handles critical issues) |
| Hybrid AI Inference System | Split & Merge
Partial calculation → Aggregate results | Collaborative (Federated)
Node: Partial Inference / Master: Aggregation | Privacy & Load Balancing
Local processing of sensitive data & server offloading | Jigsaw Puzzle
(Solving pieces individually, assembling the whole at the end) |
| Robotic Systems (Distributed) | Local Loop
Sensor → Local Compute → Actuator | Decentralized
Joints/Parts make immediate decisions/controls | Response Speed (Real-time)
Immediate physical reflex without comms latency | Human Reflexes
(Pulling hand from heat without waiting for a brain command) |
| Multi-MCU Cluster (Simulator) | Virtual Loop
Message exchange within PC memory | Central Emulation
Logical verification by PC without actual hardware | Safety & Cost Reduction
Testing failure scenarios without physical risk | Flight Simulator
(A crash doesn't destroy the actual plane) |
| SCADA / DCS | Master-Slave
Master Command ↔ RTU Report | Centralized
Central logic controls all field devices | Reliability & Visibility
Precise monitoring/control per industrial standards | Control Tower
(Centralized control of all aircraft takeoffs/landings) |
Several real-world workflows (edge AI, anomaly detection, industrial mesh networks) rely heavily on the exact message-based design principle demonstrated by cluster-matrix42.
[NOVELTY IN THIS PROJECT]
The novelty is not in new algorithms but in precision of architectural minimalism:
- Accurate reproduction of distributed compute fundamentals
- Lightweight and portable implementation in Rust
- A realistic platform for experimenting with distributed orchestration
- Easily extended into AI, neuromorphic, or IoT edge clusters
Its strength is architectural correctness with minimal code volume.
[ORIGINAL CREATOR PROFILE]
Author: Ragarnoy
- Rust-oriented systems developer
- Projects include a GameBoy emulator, puzzle solvers, and distributed frameworks
- Demonstrates deeper interests in concurrency, architecture, and low-level behavior
- Produces experimental, open, and hackable codebases for research and exploration
The author’s skill set aligns strongly with distributed systems, Rust programming, and scalable architecture experimentation—making this project a meaningful contribution to foundational compute models.
[ECOSYSTEM CONNECTION – Relation to NeuroFab Z1]
cluster-matrix42 and the NeuroFab Z1 neuromorphic cluster share the same conceptual core:
message-based distributed execution.
- NeuroFab Z1 exchanges spike events across compute nodes.
- cluster-matrix42 exchanges task messages across worker nodes.
- Both apply a master → worker orchestration model.
Thus, cluster-matrix42 forms the software-level logical foundation that a neuromorphic or AI cluster can sit on top of, enabling:
- spike-event simulation
- hybrid SNN + classic ML pipelines
- distributed AI inference
- pre-deployment cluster behavior testing
The pairing is natural and technically complementary.
[NEXT STEPS]
Extend the framework to include a network transport layer (TCP/UDP/WIZnet HW Offload)
Bind worker nodes to physical MCUs (RP2350, ESP32, W6100)
Integrate lightweight AI models or anomaly detectors
Build a hybrid simulation environment for SNN + classic ML workflows
Use it as a pre-deployment simulator for multi-node IoT systems
[LINKS]
Repository: https://github.com/Ragarnoy/cluster-matrix42
Author Profile: https://github.com/Ragarnoy
[PROJECT OVERVIEW]
cluster-matrix42는 **메시지 기반 분산 처리(Message-Passing Distributed Compute)**를 Rust로 직접 구현한 실험적 프레임워크이다.
주요 구성은 다음과 같다:
- Master Node
- 작업(Task) 분배
- 노드 상태 관리
- 결과 취합
- Worker Node
- 메시지 수신
- 스레드 풀 기반 비동기 처리
- 결과 반환
- Messaging Layer
- 태스크/응답 메시지 직렬화
- 노드 간 추상적 통신 구조
특징은 “실제 분산 시스템이 갖는 구조적 핵심”을
불필요한 의존성 없이 순수 Rust 코드로 재현했다는 점이다.
이 구조는 HPC(고성능 컴퓨팅), IoT Mesh Network, Edge AI, 로봇 분산 시스템 등
곳곳에서 사용되는 기본 분산 토폴로지를 정확히 반영한다.
즉,
지금 단계에서는 작아 보이지만,
분산 AI·뉴로모픽·MCU 클러스터의 기반이 되는 핵심 아키텍처가 이미 세워져 있다.
[KEY FEATURES (구현된 실제 기능)]
- Rust 기반 Master–Worker 분산 처리 프레임워크
- 메시지 기반 태스크 요청/응답 구조
- Worker의 스레드 풀 기반 병렬 처리
- 메시지 직렬화 및 추상화된 라우팅
- 단일 PC에서 “다중 노드”를 시뮬레이션하는 구조
- 분산 스케줄러 구현
- 도메인 확장을 고려한 모듈형 아키텍처
[TECHNICAL COMPOSITION]
사용 언어 / 소프트웨어
- Rust
- 시스템 프로그래밍 기반의 actor/worker 스타일 구조
시스템 구조 (텍스트 다이어그램)
기술적 관찰
- 메시징 / 스케줄러 / 실행 엔진 간의 관심사 분리가 매우 명확하다.
- Worker 모델이 실제 HPC나 Edge Compute의 구조와 매우 유사하다.
- 네트워크 없이도 분산 시스템 동작을 시뮬레이션할 수 있어, 구조 설계·디버깅에 유리하다.
- Rust의 안정성과 동시성 모델을 활용해, 작은 규모에서도 안정적인 병렬 처리가 가능하다.
[INDUSTRIAL & PRACTICAL RELEVANCE]
이 프로젝트는 다음과 같은 실제 분야에서 기반 기술로 사용 가능하다:
✔ IoT Mesh Network
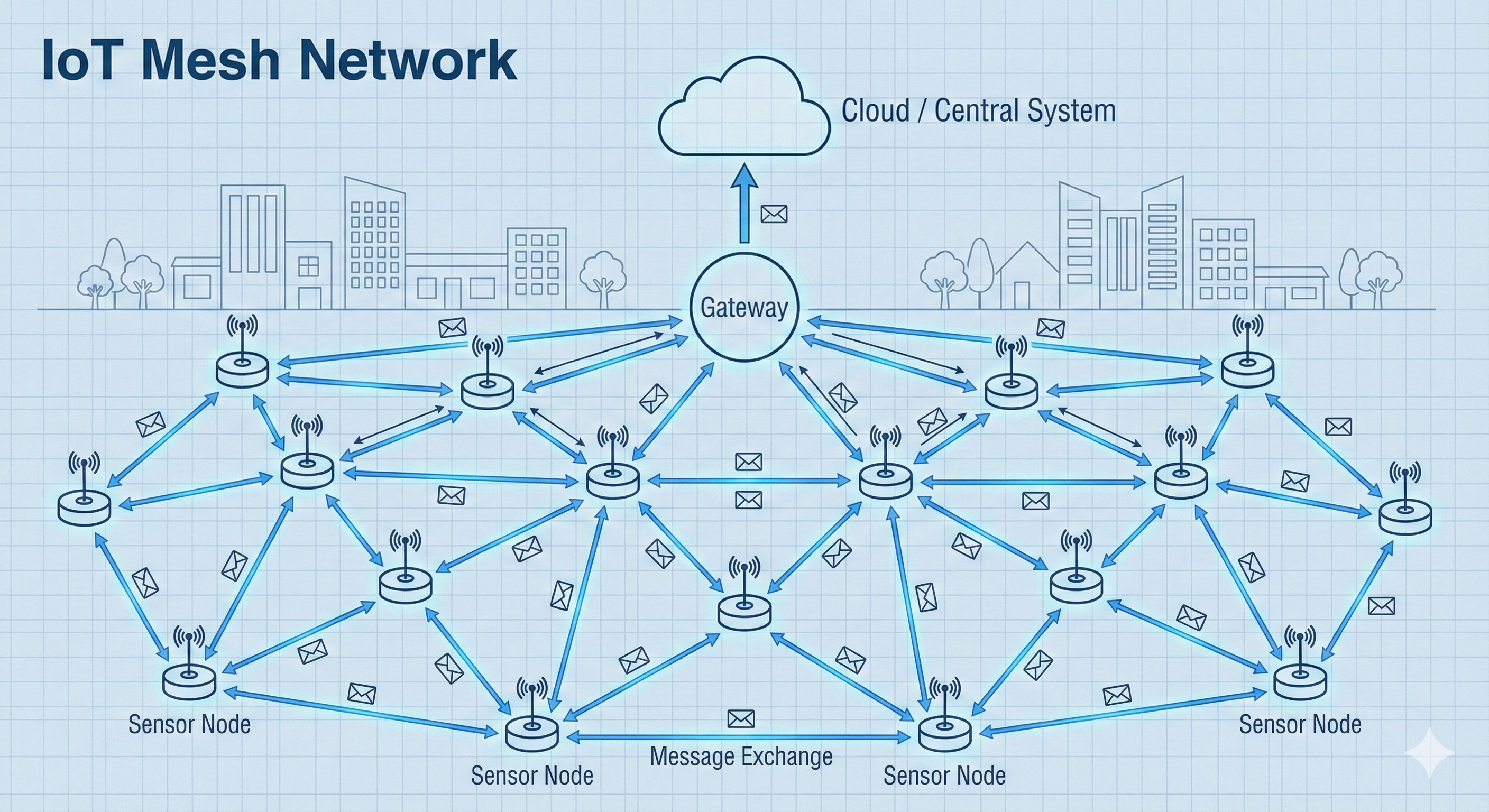
센서 노드들이 서로 메시지를 주고받는 구조와 완전히 동일하다.
✔ Edge Computing Cluster
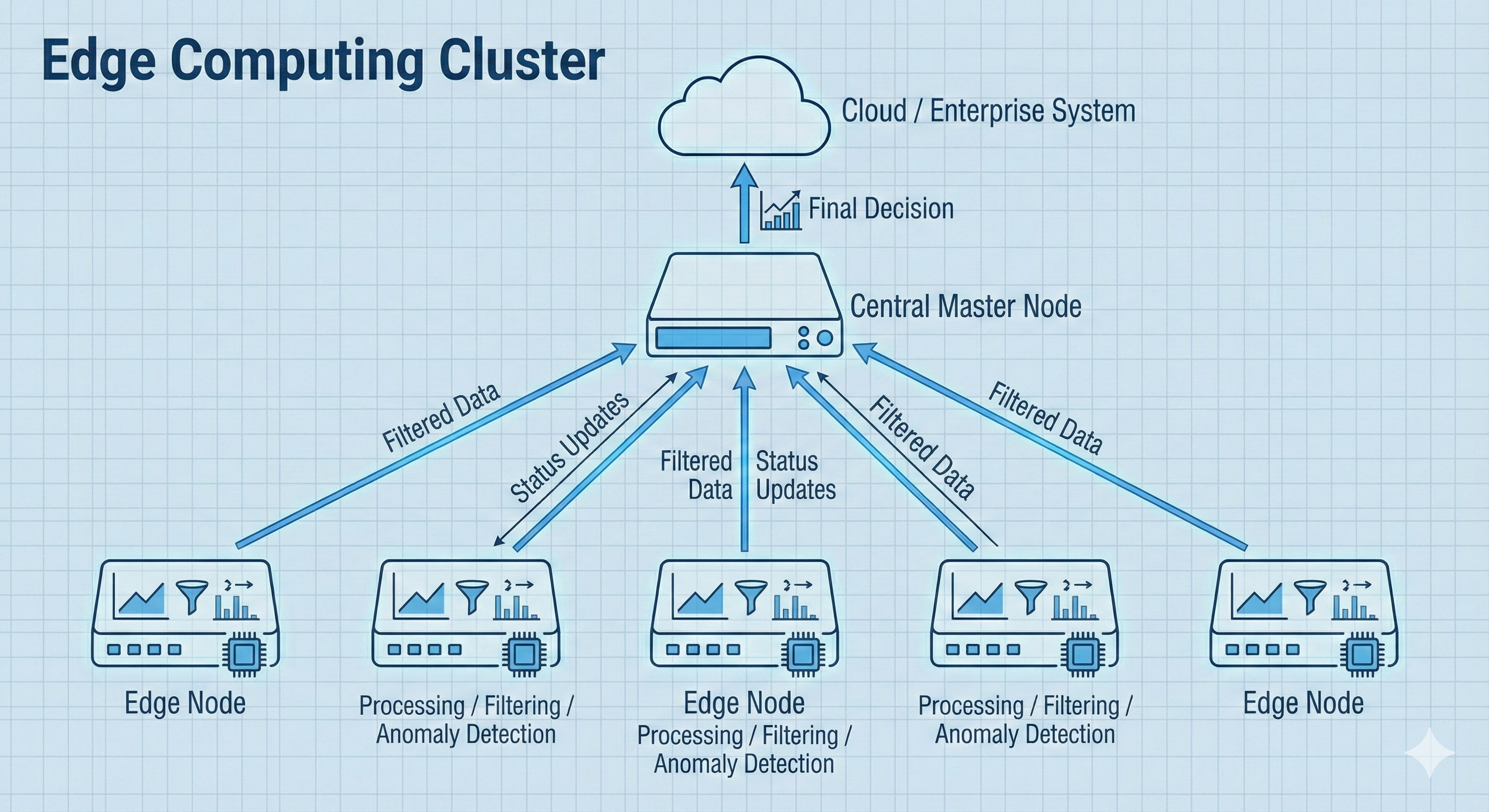
여러 엣지 노드가 연산·필터링·이상 감지를 하고
최종 결정을 중앙 노드가 내리는 구조를 그대로 재현할 수 있다.
✔ Hybrid AI Inference System
각 노드가 부분 inference를 수행하고,
마스터가 결과를 결합하는 구조는 AI 시스템에서 일반적이다.
✔ Robotic systems with distributed sensor/compute nodes
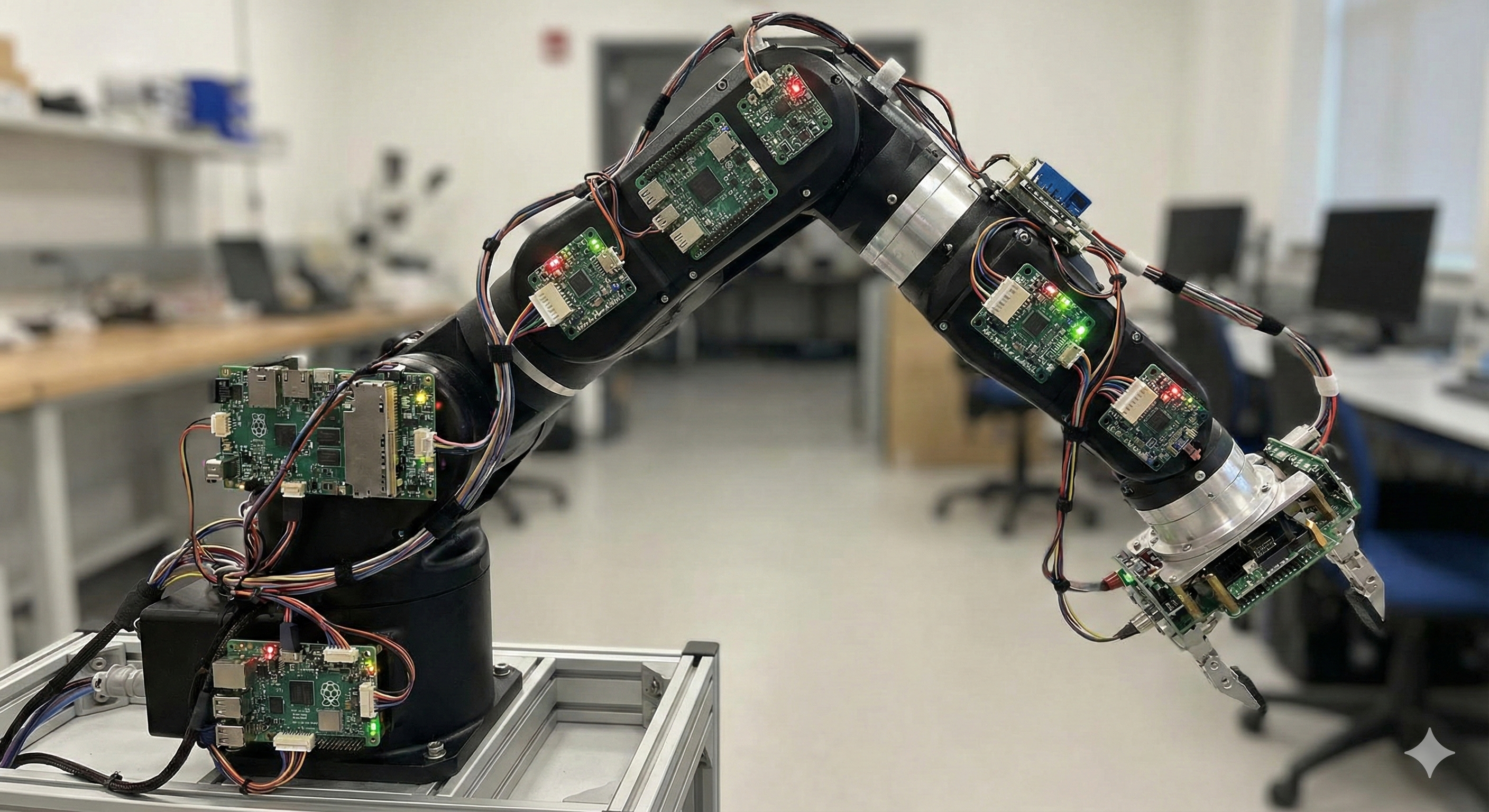
중앙 집중 방식 대신, 로봇의 각 부위(노드)에서 독립적으로 데이터를 수집하고 처리하여 효율성과 반응 속도를 높인 시스템입.
✔ Multi-MCU Cluster (물리 노드 테스트 전 시뮬레이터)
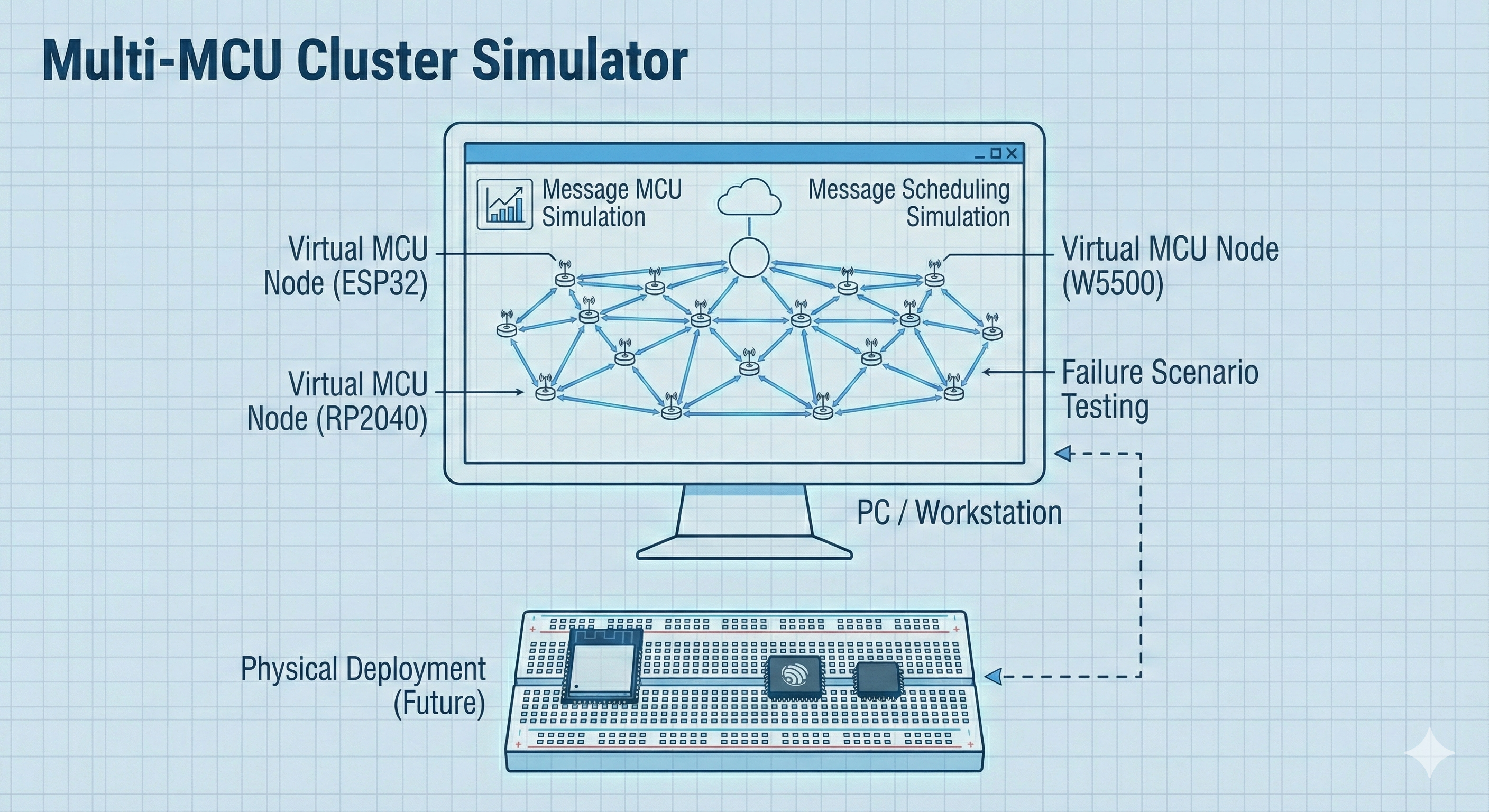
W5500 · RP2040 · ESP32 등 실제 MCU 클러스터 이전에
PC에서 message scheduling/failure scenario를 안전하게 테스트할 수 있다.
✔ SCADA / 분산 제어 시스템
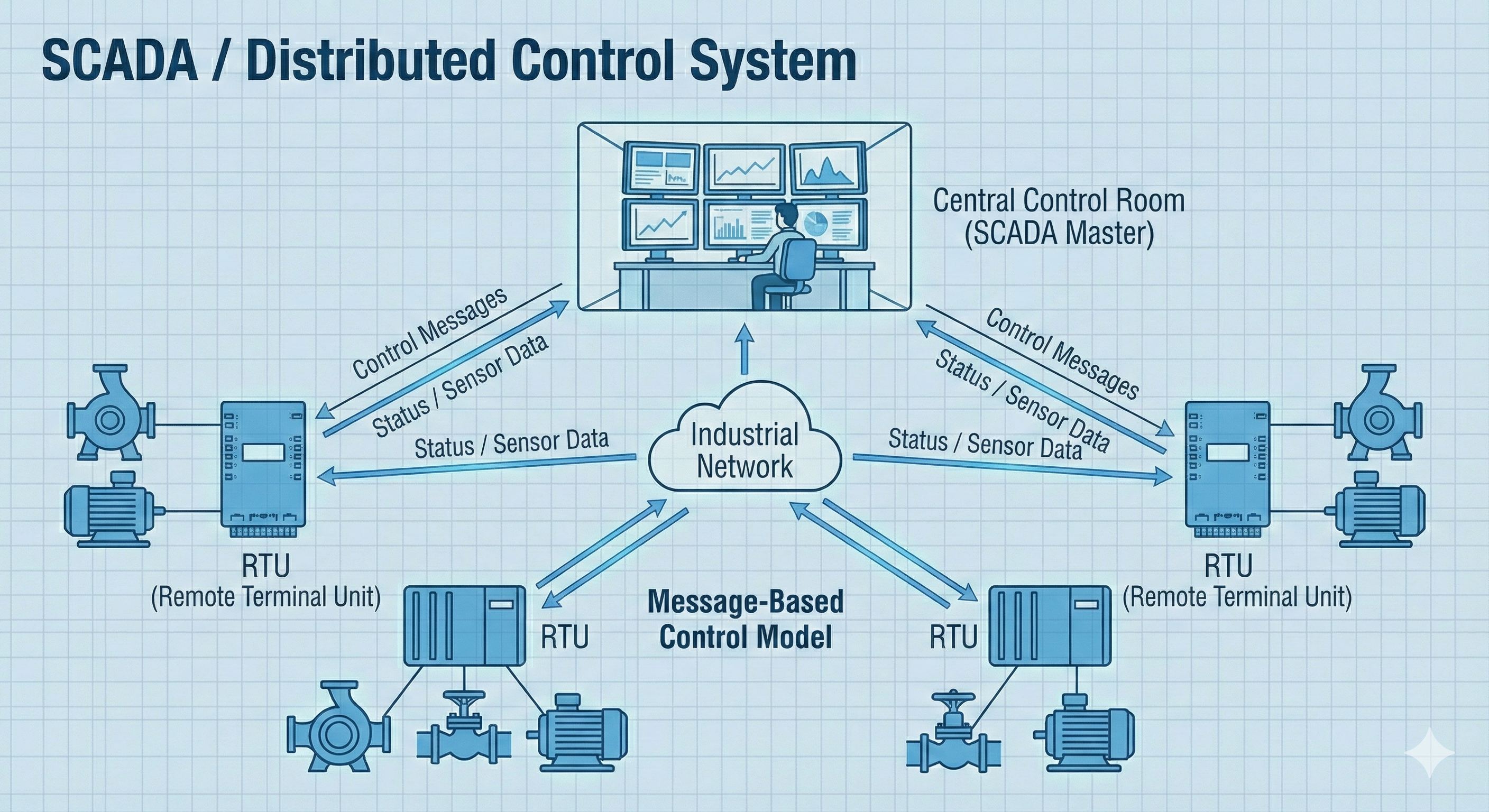
메시지 기반 제어 모델이 산업용 SCADA/RTU 구조와 논리적으로 동일하다.
분산 시스템 아키텍처 비교 분석
| 시스템 유형 | 데이터 흐름 구조 | 연산 및 결정 권한 (Authority) | 핵심 가치 (Why?) | 비유 (Analogy) |
|---|---|---|---|---|
| IoT Mesh Network | N:N (다대다)
노드 간 직접 메시지 교환 (Relay) | 상호 의존적
중앙 거치지 않고 경로 탐색 및 전달 | 연결성 & 확장성
음영 지역 해소 및 네트워크 생존성 확보 | 거미줄
(한 줄이 끊겨도 우회해서 도달) |
| Edge Computing Cluster | Bottom-Up (상향식)
Edge(1차) → Center(2차) | 계층적 분담
Edge: 필터링·감지 / Center: 최종 확정 | 대역폭 효율화
불필요한 데이터를 줄이고 중요 정보만 전송 | 지사 보고 체계
(지점에서 해결하고 중요 안건만 본사 보고) |
| Hybrid AI Inference System | Split & Merge (분할/결합)
부분 연산 → 결과 취합 | 협업적 (Federated)
노드: 부분 추론 / 마스터: 결과 결합 | 프라이버시 & 부하 분산
민감 정보의 로컬 처리 및 서버 부하 감소 | 퍼즐 맞추기
(각자 조각을 맞추고, 마지막에 전체 그림 완성) |
| Robotic Systems (Distributed) | Local Loop (독립 루프)
센서 → 로컬 연산기 → 구동기 | 지역적 독립성 (Decentralized)
각 관절/부위가 즉각적 판단 및 제어 | 반응 속도 (Real-time)
통신 지연 없는 즉각적인 물리 반응(Reflex) | 인체의 반사 신경
(뜨거운 것을 만지면 뇌 명령 없이 손을 뗌) |
| Multi-MCU Cluster (Simulator) | Virtual Loop (가상 루프)
PC 메모리 내 메시지 교환 | 중앙 모의 (Emulated)
실제 하드웨어 없이 PC가 논리적 검증 | 안전성 & 비용 절감
물리적 고장 위험 없이 극한 상황(Fail) 테스트 | 비행 시뮬레이터
(추락해도 실제 비행기는 부서지지 않음) |
| SCADA / DCS | Master-Slave (주종 관계)
Master 명령 ↔ RTU 상태 보고 | 중앙 집중형 (Centralized)
중앙의 논리가 전체 필드 장비를 제어 | 신뢰성 & 가시성
산업 표준에 맞춘 정확한 상태 감시 및 제어 | 관제탑
(모든 비행기의 이착륙을 중앙에서 통제) |
즉,
cluster-matrix42는 분산처리를 필요로 하는 거의 모든 산업·연구 분야의 기반 엔진이 될 수 있다.
[NOVELTY IN THIS PROJECT]
- 분산 시스템의 핵심 구조를 Rust로 “정확히” 재현한 점
- 배우기 쉽고 실험하기 쉬운 “극단적 미니멀리즘 + 정확한 구조”
- IoT/MCU/AI/뉴로모픽 어디로든 확장 가능한 범용성
- 아키텍처의 정교함 대비 코드 규모가 작아 학습·확장 난이도가 낮음
특히 “분산 메시지 기반 구조”는
뉴로모픽·AI inference pipeline·센서 네트워크의 근본적 공통 요소다.
[AUTHOR & DOMAIN SIGNIFICANCE]
● 저자: Ragarnoy
- Rust 기반 시스템 프로그래밍을 주로 다루는 개발자
- GameBoy 에뮬레이터, 퍼즐 솔버, 분산처리 프레임워크 등
시스템·아키텍처 중심 프로젝트 다수 보유 - 저수준·동시성·분산 구조에 대한 감각이 뛰어남
- 규모는 작지만, 아키텍처 정확성·실험정신이 돋보이는 개발자
● 저자가 활동하는 영역의 의미
- AI/Neural 기반 프로젝트보다 “기반 아키텍처”에 집중하는 개발자들은
생태계 확장에 중요한 역할을 한다. - cluster-matrix42처럼 분산 시스템의 기본 구조를 재현한 프로젝트는
AI·뉴로모픽·IoT Mesh가 올라가는 토대 역할을 한다.
즉, 저자는
물리적 뉴로모픽 클러스터(NeuroFab Z1)와 같은 프로젝트가 제대로 돌아가기 위한
논리적 분산구조의 ‘초석’을 다루고 있다.
[RELATION TO NEUROFAB Z1 – 뉴로모픽과의 연결]
이 프로젝트를 뉴로모픽과 연결시키는 핵심 키워드는 단 하나다:
“메시지 기반 분산 처리(Message-Passing Distributed System)”
두 프로젝트의 본질은 완벽하게 일치한다:
| cluster-matrix42 | NeuroFab Z1 |
|---|---|
| Task 메시지 | Spike 메시지 |
| Master–Worker | Controller–Compute Nodes |
| Thread Pool | SNN Core (LIF + STDP) |
| Software-based routing | 16-bit Matrix Bus routing |
| Logical cluster | Physical neuromorphic cluster |
즉,
cluster-matrix42는 ‘논리적 분산 처리 엔진’,
NeuroFab Z1은 ‘스파이크 기반 물리 분산 처리 엔진’이다.
이 둘은 서로 다른 층에 있지만 같은 분산 철학을 공유하며,
cluster-matrix42는 뉴로모픽 실험을 위한 사전 시뮬레이터로도 확장할 수 있다.
[NEXT STEPS]
- WIZnet W5100/W5500 기반 물리 노드를 Worker로 확장
- RP2040·ESP32 MCU 기반 실제 메시지 클러스터 프로토타입 제작
- 스파이크 메시지(simulated SNN event) 기반 뉴로모픽 시뮬레이터 구축
- AI inference micro-models를 worker마다 배포하는 Hybrid Edge AI 모델 실험
- 분산 시스템의 Fault-injection 테스트 벤치로 확장 가능
[LINKS]
GitHub Repo: https://github.com/Ragarnoy/cluster-matrix42
Author Profile: https://github.com/Ragarnoy
-
cluster-matrix42
