
Tool Grinding Machine Saacke UW II: many new copper nerves, and a new silicon brain
The SAACKE II grinder was revived with new wiring and a modern control system, replacing outdated relays to create a safer, reliable, and future-ready machine
Replacing Old Copper Nerves with a New Silicon Brain
👤 AUTHOR
Simon (Simon's Dialogs)
A maker and engineer who specializes in restoring industrial machinery with modern control electronics.
He documents real-world engineering challenges and brings legacy equipment back to life using open, accessible technologies.
🔗 Blog: https://simonsdialogs.com/
🔗 Project Page: https://simonsdialogs.com/2024/11/tool-grinding-machine-saacke-uw-ii-many-new-copper-nerves-and-a-new-silicon-brain/
1️⃣ Project Overview
The SAACKE UW II is a robust German tool grinder from the 80s, mechanically excellent but electrically obsolete.
All original controls, drivers, and wiring were removed, and the machine received:
- Completely new wiring (“new copper nerves”)
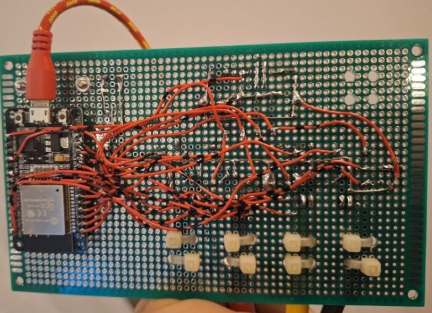
- An ESP32-based motion controller
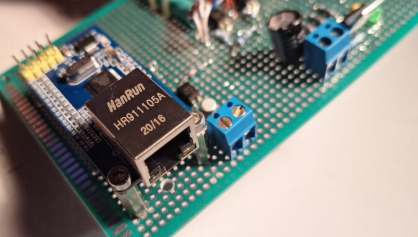
- A W5500 Ethernet interface for real-time UDP motion commands
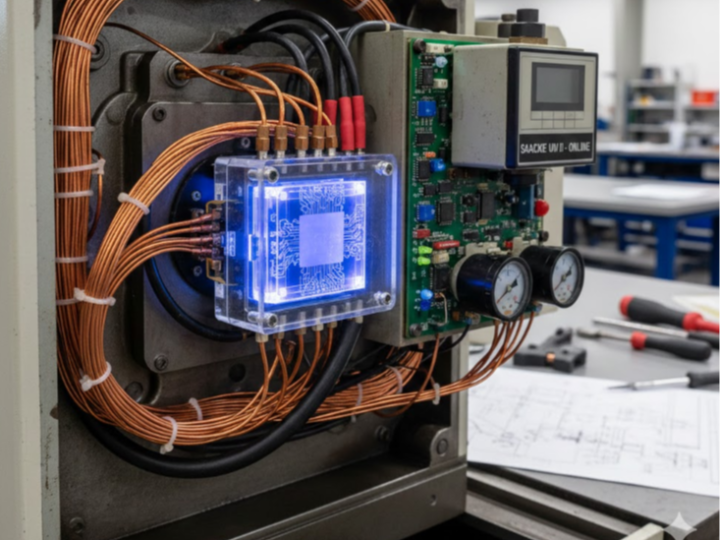
Clean, DIN-rail mounted power electronics inside the control cabinetInstead of using proprietary motion cards (like MESA boards used on his other machines), the author chose an open ESP32 + W5500 + LinuxCNC architecture, making the grinder fully controllable over a single Ethernet cable

2️⃣ System Architecture
High-level data flow:
LinuxCNC PC
↓ (UDP)
W5500 Ethernet
↓ (SPI)
ESP32 Motion Controller
↓
Servo Drivers + Encoders + IO
🧩 Components
🔧 Control System
- ESP32-based motion controller (step/dir generation, fault/limit handling)
- WIZnet W5500 Ethernet module (SPI interface, hardware UDP/TCP stack)
- Custom 160×100 mm control board
- 5 V input with on-board 3.3 V LDO
- Terminal blocks, RJ45 panel-mount connector
⚙ Machine Hardware
- SAACKE UW II Tool Grinder (German precision grinder)
- 4-axis servo drivers (HD-50 D-sub)
- Incremental/Absolute encoders (IP68 SP20 connectors)
- Coolant pump, limit switches, E-STOP, operator panel
🌐 Network Setup
- CAT6 panel-mount → W5500 → ESP32
- Connected to the LinuxCNC PC via UDP protocol
- LinuxCNC runs the trajectory planner and sends motion commands to the ESP32 via UDP packets over Ethernet.
- The W5500 handles the low-level Ethernet and UDP framing in hardware, connected to the ESP32 through SPI.
- ESP32 interprets the incoming motion commands, generates step/dir pulses, and reads back status/fault lines.
- Servo drivers and encoders are wired via short CAT cables and HD-50 connectors for noise-resistant, compact routing.
The result:
“The whole grinding machine is now controlled by one ethernet cable, running UDP protocol.”
3️⃣Why WIZnet W5500?
From the project context and environment, W5500 brings several clear advantages:
🔌 Deterministic, Noise-Resistant Link
- The grinder sits in a noisy industrial environment with heavy motors and long cable runs.
- A shielded wired Ethernet link via W5500 is more robust than relying on Wi-Fi in a steel cabinet.
⚙ Offloaded TCP/IP/UDP Stack
W5500 implements the UDP/IP stack in hardware, leaving ESP32 cycles free for:
- Step generation
- Encoder handling
- Fault monitoring
This separation matches the design: LinuxCNC updates motion commands every few milliseconds, while all time-critical motion control stays inside the ESP32.
🧱 Single-Cable Integration
- A CAT6 panel-mount connector on the cabinet connects to the W5500 + ESP32 board inside.
- Only one Ethernet cable is needed from PC to machine—no extra USB, parallel card, or proprietary interface.

💻 Open & Flexible Software Side
- LinuxCNC communicates over UDP using a HAL driver.
- The firmware is a modified open-source ESP32 motion controller; pin-mapping and W5500 SPI usage were customized to fit the 4-axis grinder.
🔌 ENGINEERING – FOCUSED INSIGHTS

Legacy Machine, Modern Network Backbone
- Instead of installing a costly CNC controller, the author built a network-centric motion system using commodity parts: ESP32 + W5500 + LinuxCNC.
Hard Real-Time Where It Matters
- Step pulses and trajectory interpolation run locally on ESP32;
- UDP + W5500 transport is allowed to be “soft real-time,” as long as commands arrive every few ms.
I/O Density and Pin Pressure on ESP32
- The article notes that the pin layout is “quite critical” because step/dir outputs and the SPI bus for W5500 consume almost all usable pins.
- Good example of designing around pin multiplexing limits.
Industrial Cabling Practices
- Encoders use separate IP68 connectors and a dedicated duct to keep them away from power cabling.
- Short CAT cable jumpers from each servo driver to the ESP32 board keep signal integrity high.
🛠 Result & Outcome
After the upgrade, the SAACKE UW II is:
- Driven by LinuxCNC over Ethernet, not by its original NC hardware.
- Fully motion-controlled by a W5500-connected ESP32 board inside the original control cabinet.
- Safely rewired with new copper harnesses, fuses, and contactors.
The machine now:
- Runs multi-axis grinding cycles under LinuxCNC
- Offers modern diagnostics and tuning using standard PC tools
- Keeps its original mechanical precision while gaining a networked, software-defined motion system
This is a practical blueprint for upgrading other legacy CNC/NC machines using W5500 as the deterministic Ethernet layer.
📘 REFERENCE LINKS
Original Project Article
Related SAACKE UW II posts (servos, mechanics)
한국어 버전 -
👤 저자소개
Simon (SimonsDialogs)
공작기계·RF·산업 장비 복원을 전문적으로 다루는 메이커이자 엔지니어.
구형 CNC 및 산업장비를 최신 MCU·Ethernet 기반 시스템으로 개조하는 작업을 공개하고 있으며,
모든 과정을 투명하게 기록하는 것으로 유명하다.
🔗 블로그: https://simonsdialogs.com/
🔗 원문 프로젝트:
https://simonsdialogs.com/2024/11/tool-grinding-machine-saacke-uw-ii-many-new-copper-nerves-and-a-new-silicon-brain/
1️⃣ Project Overview
SAACKE UW II는 1980년대에 만들어진 견고한 독일제 공구 연삭기로, 기계적인 성능은 매우 뛰어나지만 전기·제어 시스템은 시대에 뒤떨어져 있었다. 기존의 모든 제어 장치, 드라이버, 배선을 전부 제거한 뒤, 기계에는 다음과 같은 새 시스템이 적용되었다:
완전히 새로 교체한 배선(“새 구리 신경”)
ESP32 기반 모션 컨트롤러
실시간 UDP 모션 명령을 위한 W5500 이더넷 인터페이스
제어 캐비닛 내부에 DIN 레일 방식으로 깔끔하게 구성된 전원/구동 전장부
저자가 다른 장비에서 사용하던 MESA 보드 같은 독점(프로프라이어터리) 모션 카드 대신, 오픈 아키텍처인 ESP32 + W5500 + LinuxCNC 구조를 선택함으로써, 이 연삭기는 단 하나의 이더넷 케이블로 완전히 제어 가능한 장비가 되었다.
2️⃣ System Architecture
LinuxCNC는 궤적(트래젝터리) 플래너를 실행하고, 이더넷을 통해 UDP 패킷으로 모션 명령을 ESP32에 전송한다.
W5500은 SPI로 ESP32와 연결되어 있으며, 하드웨어에서 저수준 이더넷 처리와 UDP 프레이밍을 담당한다.
ESP32는 들어오는 모션 명령을 해석해 step/dir 펄스를 생성하고, 상태/고장(Fault) 라인을 읽어 되돌려 준다.
서보 드라이버와 인코더는 짧은 CAT 케이블과 HD-50 커넥터로 배선되어, 노이즈에 강하고 컴팩트한 라우팅이 가능하다.
결과적으로 :
“연삭기 전체가 이제 UDP 프로토콜을 사용하는 단 하나의 이더넷 케이블로 제어된다.”
🏗 시스템 구조 (Architecture)
🧩 구성 요소 (Components)
🔧 제어 시스템
- ESP32 기반 모션 컨트롤러 (step/dir 생성, fault/limit 처리)
- WIZnet W5500 Ethernet 모듈 (SPI 연결, 하드웨어 UDP/TCP 스택)
- 커스텀 160×100mm 제어 보드
- 5V 입력, 온보드 3.3V LDO
- 터미널 블록, RJ45 패널 마운트 커넥터
⚙ 기계 구성품
- SAACKE UW II Tool Grinder (독일제 정밀 연삭기)
- 4축 서보 드라이버 (HD-50 D-sub)
- Incremental/Absolute 엔코더 (IP68 SP20 커넥터)
- 냉각 펌프, 리미트 스위치, E-STOP, 조작 패널
🌐 네트워크 구성
- CAT6 패널마운트 → W5500 → ESP32
- LinuxCNC PC와 UDP 프로토콜로 연결
- W5500 → 하드웨어 UDP 처리
- ESP32 → 모션 명령 실행 + step/dir 출력
- 엔코더/서보드라이버와 즉시 상호작용
- 산업 환경에서도 안정적인 네트워크 기반 제어 구조
3️⃣ 왜 WIZnet W5500인가?
프로젝트의 맥락과 환경을 보면, W5500은 다음과 같은 분명한 장점을 제공한다:
🔌 결정론적(Deterministic)이고 노이즈에 강한 링크
연삭기는 강력한 모터와 긴 케이블 배선이 있는 노이즈 많은 산업 환경에 놓여 있다.
강철 캐비닛 내부에서 Wi-Fi에 의존하는 것보다, W5500을 사용한 차폐 유선 이더넷 연결이 훨씬 더 견고하고 안정적이다.
⚙ TCP/IP/UDP 스택 하드웨어 오프로딩
W5500은 UDP/IP 스택을 하드웨어로 구현해 ESP32의 연산 자원을 다음에 집중할 수 있게 한다:
- 스텝(step) 생성
- 인코더 처리
- Fault(고장) 모니터링
이 분리는 설계 방향과 정확히 맞는다. LinuxCNC가 수 ms 주기로 모션 명령을 업데이트하고, 시간에 민감한 제어는 모두 ESP32 내부에서 처리되기 때문이다.
🧱 단일 케이블 통합
캐비닛에 CAT6 패널마운트 커넥터를 달아 내부의 W5500 + ESP32 보드에 직접 연결한다.
PC에서 기계로 연결되는 것은 이더넷 케이블 한 가닥이면 충분하며, 별도의 USB, 패러럴 카드, 또는 독점 인터페이스가 필요 없다.
💻 오픈·유연한 소프트웨어 측면
LinuxCNC는 HAL 드라이버를 통해 UDP로 통신한다.
펌웨어는 오픈소스 ESP32 모션 컨트롤러를 수정한 것이고, 4축 연삭기에 맞게 핀 매핑과 W5500 SPI 사용이 커스터마이징되었다.
🧠 Engineering-Focused Insights
1) 레거시 기계에 네트워크 기반 제어를 부여
기존 SAACKE UW II는 전혀 네트워크 기능이 없었고, 제어 시스템도 오래된 릴레이·아날로그 드라이버 기반이었다.
ESP32 + W5500 조합은 저비용으로 최신 CNC 수준의 네트워크 기능을 제공했다.
2) 실시간 제어는 로컬, 네트워크는 비실시간 구조
실시간 요구: step/dir 생성 → ESP32 내부에서 처리
비실시간: UDP 명령 수신 → W5500에서 하드웨어 처리
이 분리는 안정적 CNC 동작을 위한 핵심 설계 철학이다.
3) 산업 환경에서 Wi-Fi 대비 Ethernet의 절대적 우위
금속 케이스, 모터 노이즈, 긴 배선 등
Wi-Fi가 불안정해질 요소가 매우 많다.
W5500의 유선 PHY + 하드웨어 스택은 이런 환경에서 가장 높은 신뢰성을 보장한다.
4) 오픈소스 기반의 장점
기존 산업용 CNC 보드(MESA 등)를 사용하면 비용이 크고 고정된 인터페이스만 가능하다.
ESP32 + W5500은 펌웨어를 자유롭게 수정할 수 있어
기계에 최적화된 구조로 설계가 가능하다.
🛠 실제 적용 결과(Result & Outcome)
- 모든 서보축 정상 작동
- Ethernet 단일 케이블로 완전 제어
- LinuxCNC와 완벽한 연동
- 기계 내부 배선 완전 재구축
- 인코더 신호, Fault 라인, 리미트 스위치 안정적 처리
- 향후 UI, 자동 공정, 진단 기능 확장 가능
업그레이드 이후 SAACKE UW II는 다음과 같이 동작한다:
기존의 NC 하드웨어가 아니라, 이더넷을 통한 LinuxCNC로 구동된다.
원래 제어 캐비닛 내부에 장착된 W5500에 연결된 ESP32 보드가 모든 모션을 완전히 제어한다.
새 구리 하네스(배선), 퓨즈, 콘택터로 안전하게 전면 재배선되었다.
이제 이 기계는:
LinuxCNC 아래에서 다축 연삭 사이클을 수행할 수 있고
표준 PC 도구로 현대적인 진단과 튜닝을 제공하며
기존의 기계적 정밀도를 유지하면서도 네트워크 기반, 소프트웨어 정의 모션 시스템을 얻게 되었다.