
Gas and Flame Detector for Kitchen Security System
This system is build mainly for household needs especially for kitchen security. The system that will be created will detect gas and fire

DFRobot - Gravity: Analog LM35 Temperature Sensor For Arduino
x 1
WIZnet - Surf5
x 1

WIZnet - WIZPoE-P1
x 1

Flying Fish - MQ5 Gas Sensor
x 1
microsoft - VS Code
x 1
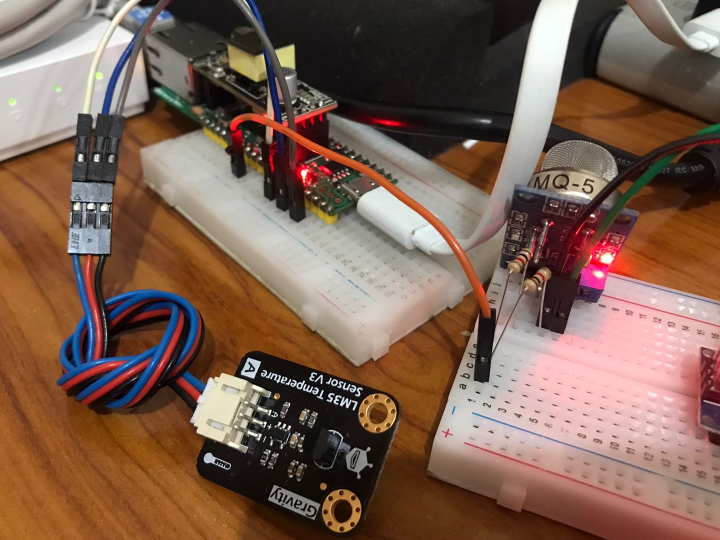
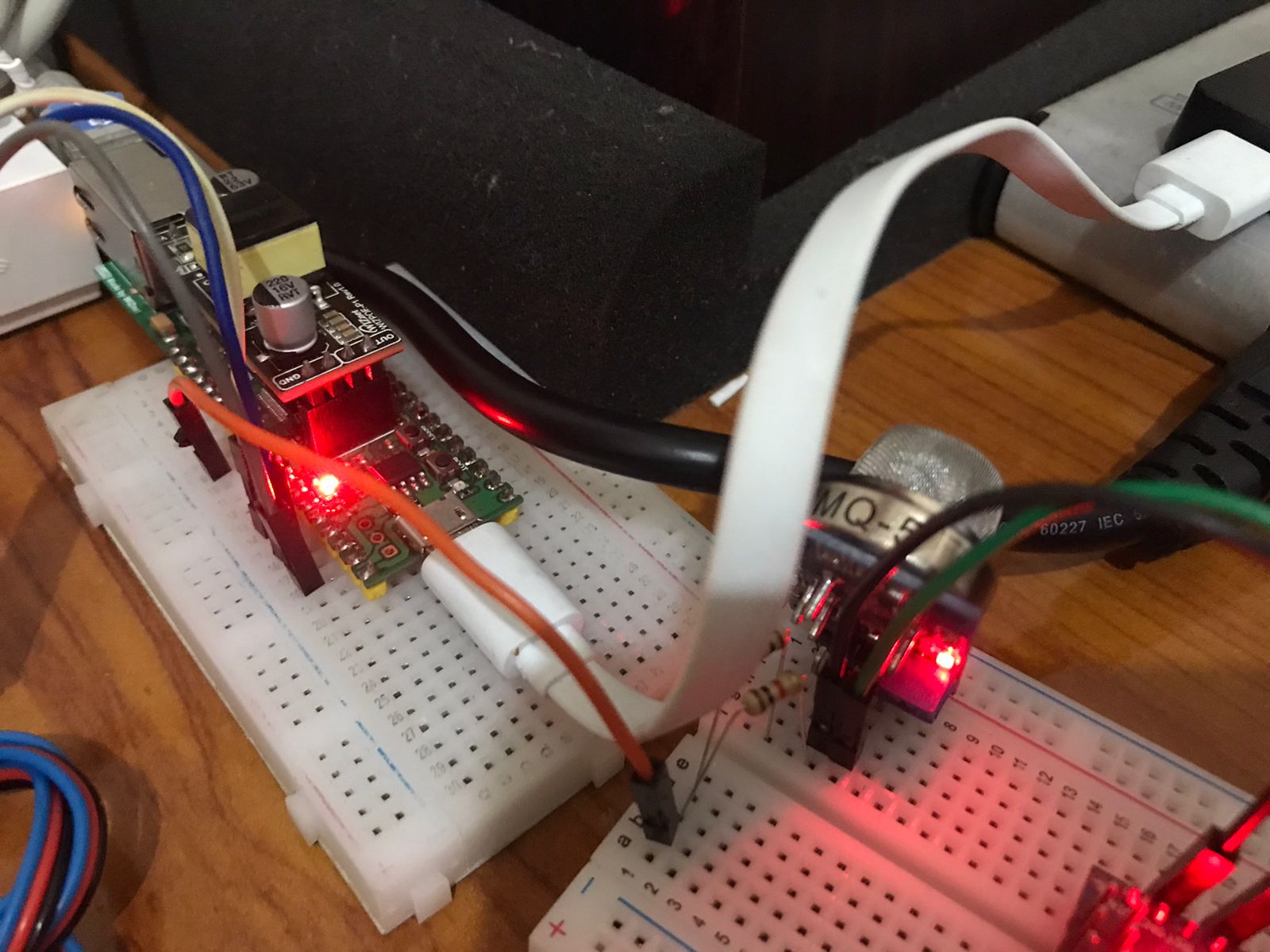
This project is built for kitchen security. Hardwares used in this project contains Wiznet Surf5, LM35 Temperature Sensor, and MQ-5 Gas Sensor. The use of LM35 Temperature Sensor is to detect the temperature inside the room and it will differentiate hot and normal temperature inside the room, especially inside the kitchen. The use of MQ-5 sensor is to detect the leakage gas if there is some trouble inside the kitchen that can possibly produce a fire and the Surf5 will send the data on localhost IP from analog data read by the ADC of the microcontroller.


The first trial from the pictures above is to test the LM35 sensor using a lighter with a flame near the sensor so that the microcontroller can read the ADC value of the flame detection and send it through IP. From the IP, the data value before flame detection and after flame detection
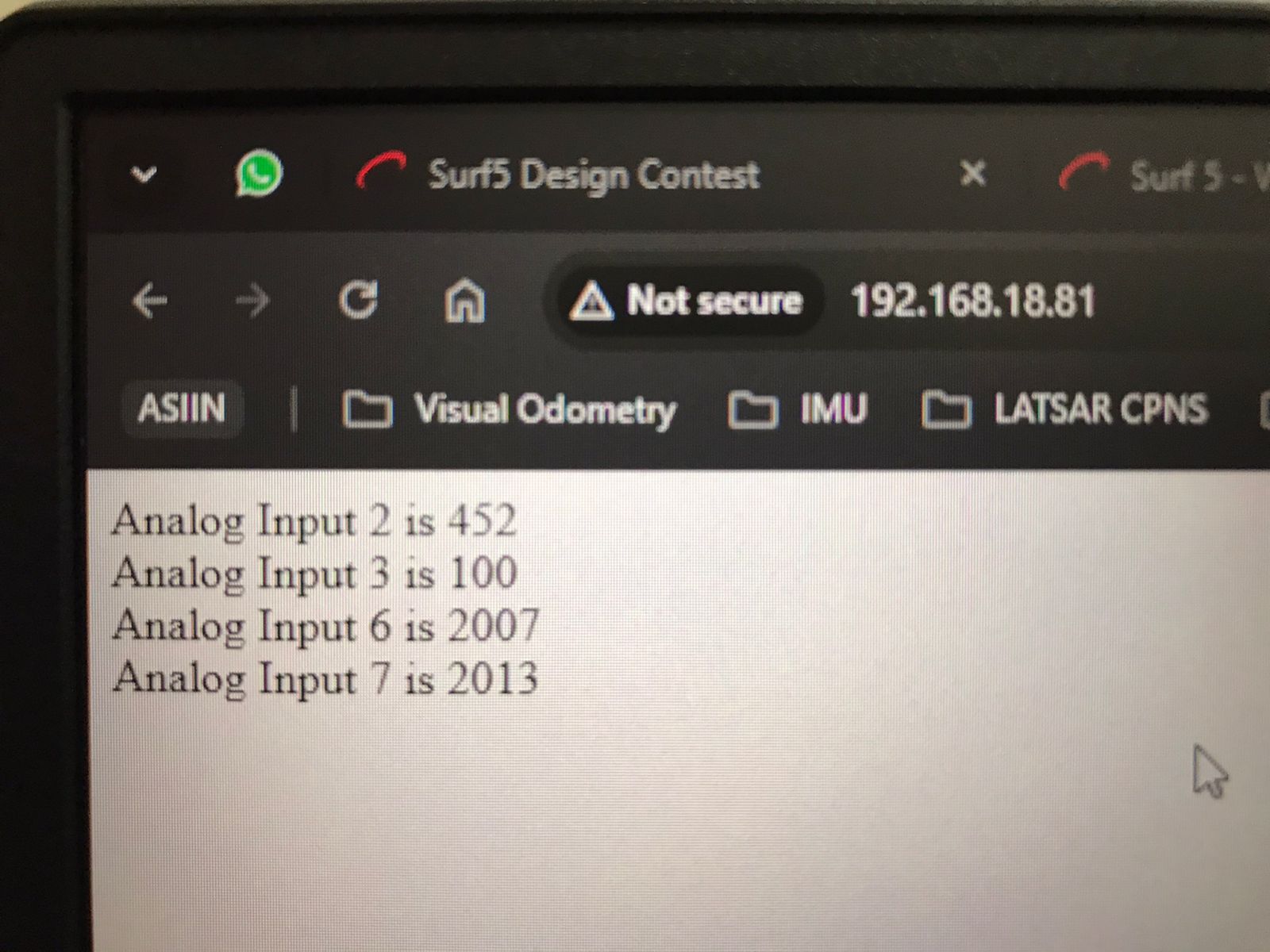
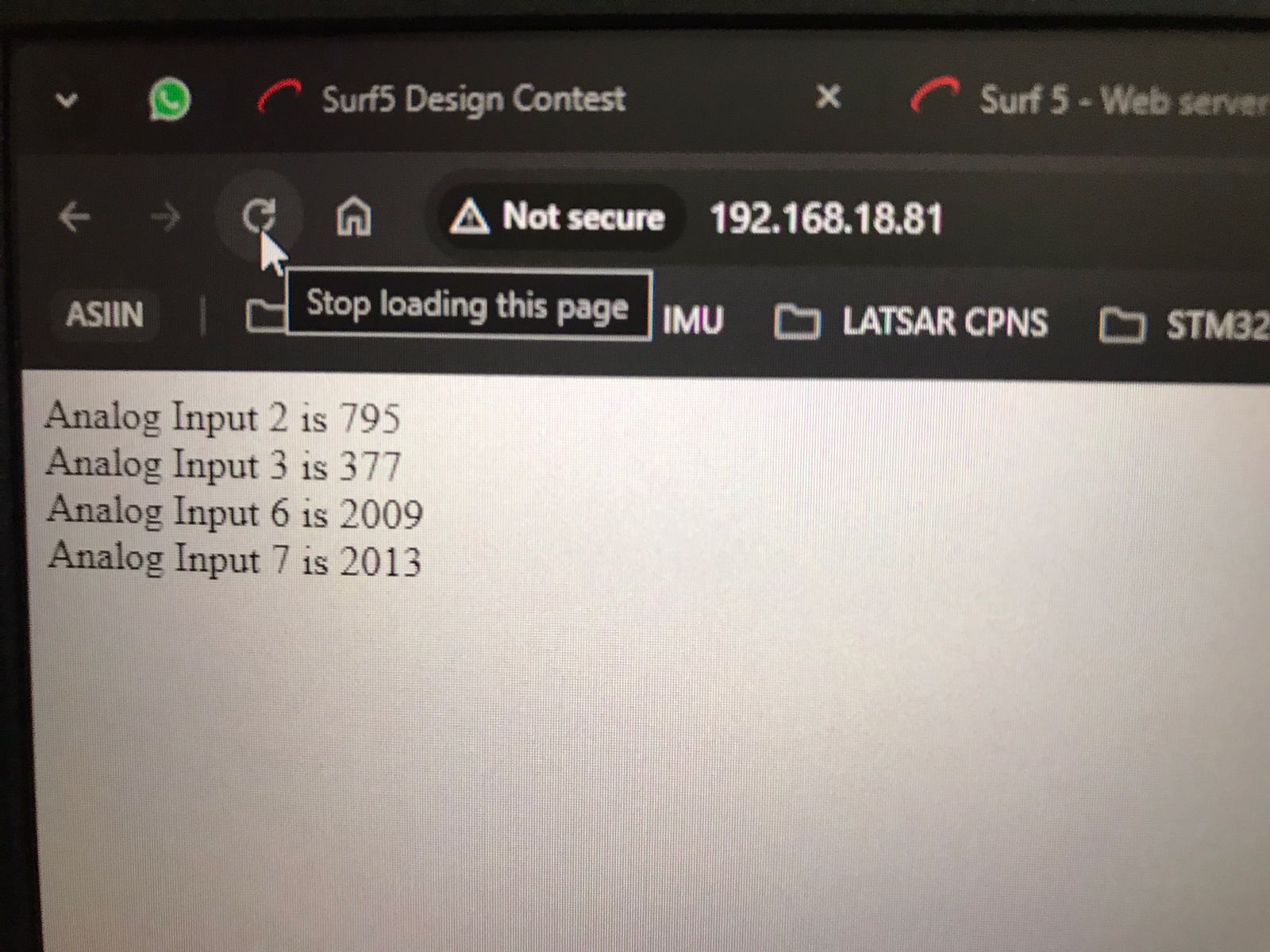
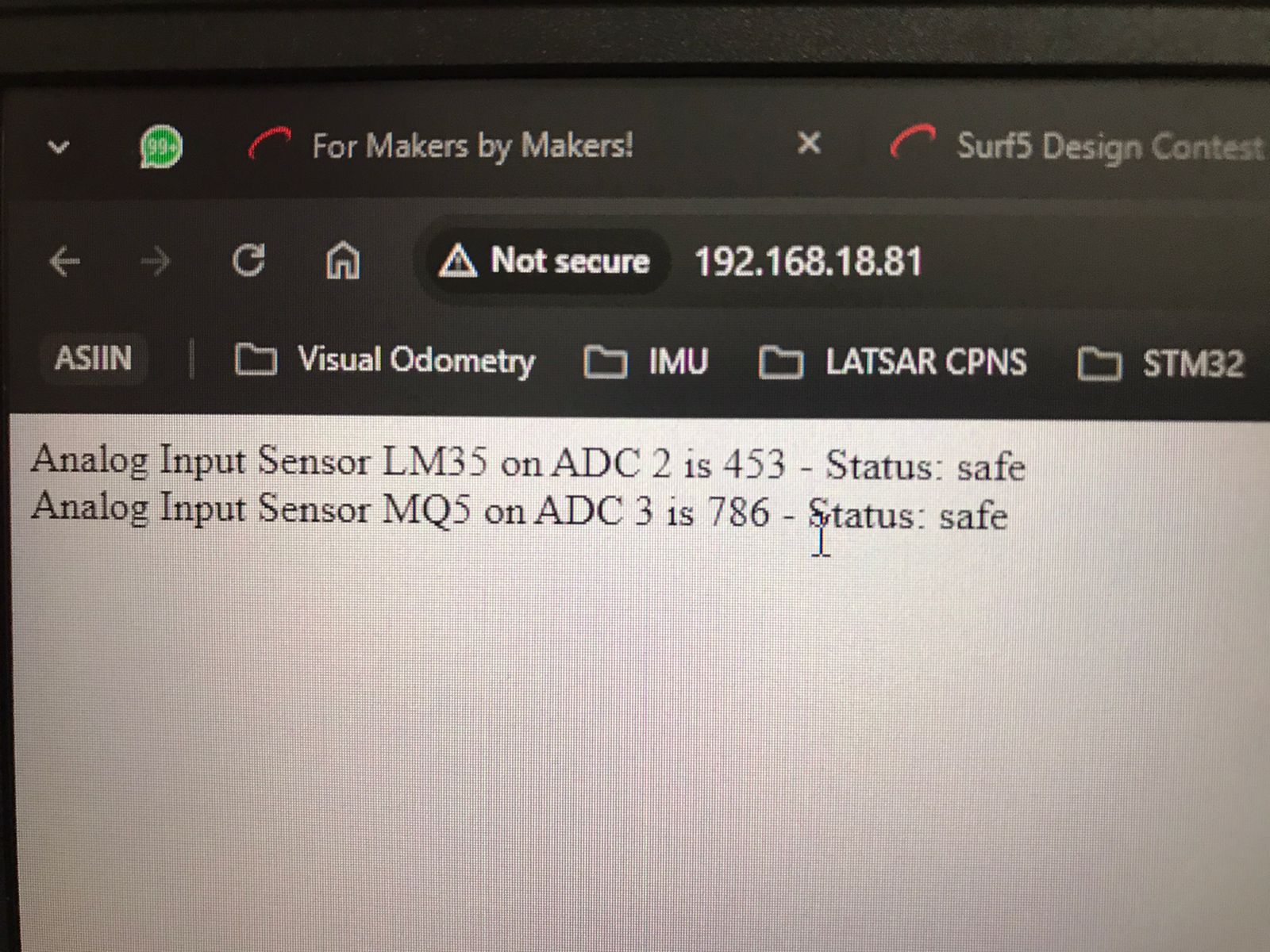
The picture above is ADC value on ANalog Input 2 with ADC value 452 before the lighter placed near the sensor. After the lighter is placed near the sensor, the ADC value turn to 795 as can be seen in the picture below.
The program has been modified so that the data that sent to the IP is just ADC value from ADC channel 2 and ADC channel 3 for LM35 sensor and MQ5 gas sensor respectively with a status information of each sensor that can give information such as "safe" and "warning" through the IP.
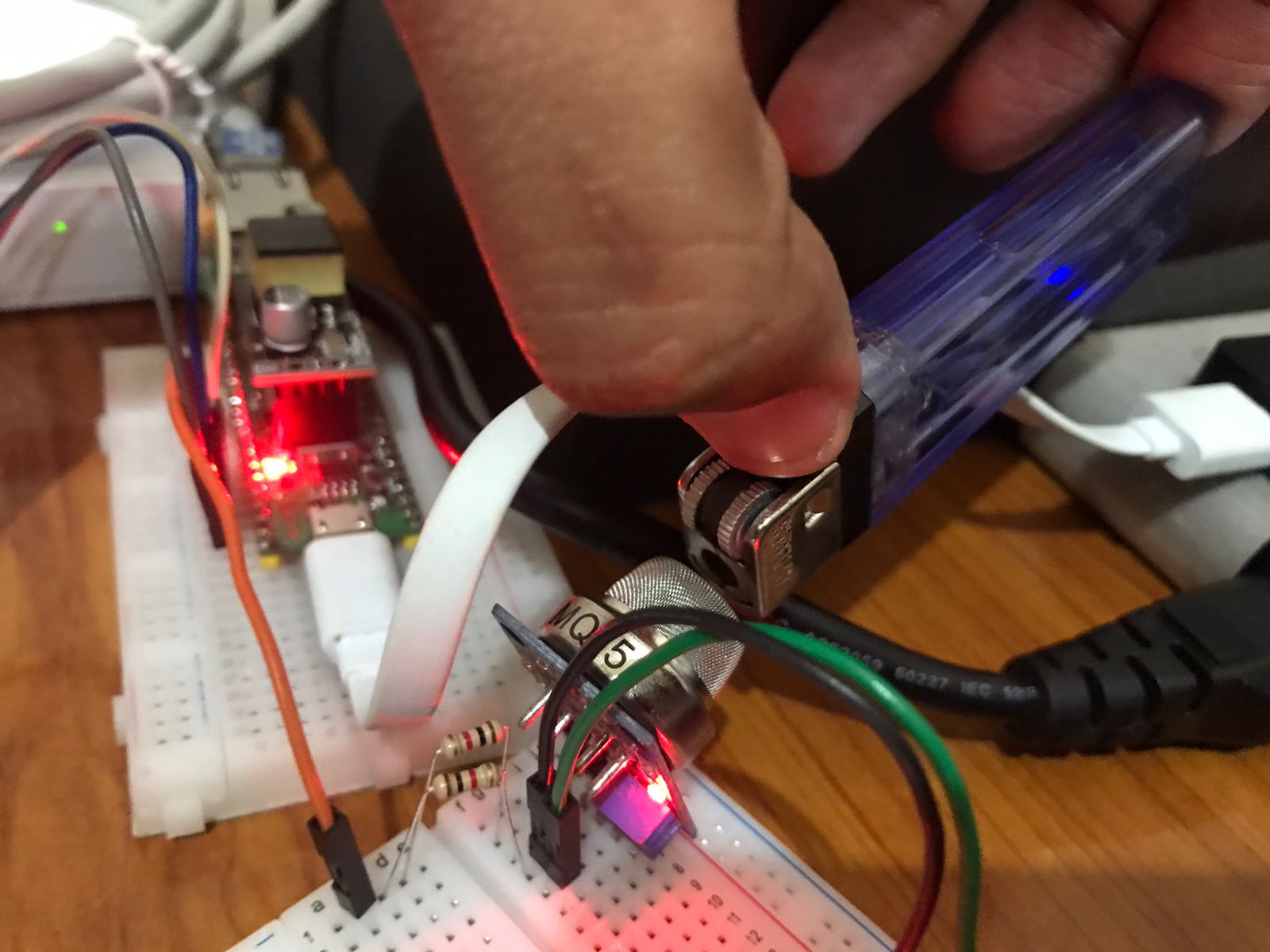
The second trial is to test the MQ5 sensor using the new modified program as can be seen from the picture below on each process. We used the gas from the lighter pointed to the MQ5 sensor so that the ADC value can be seen from the IP that MQ5 has been detected the gas with the status changed from "safe" to "warning".
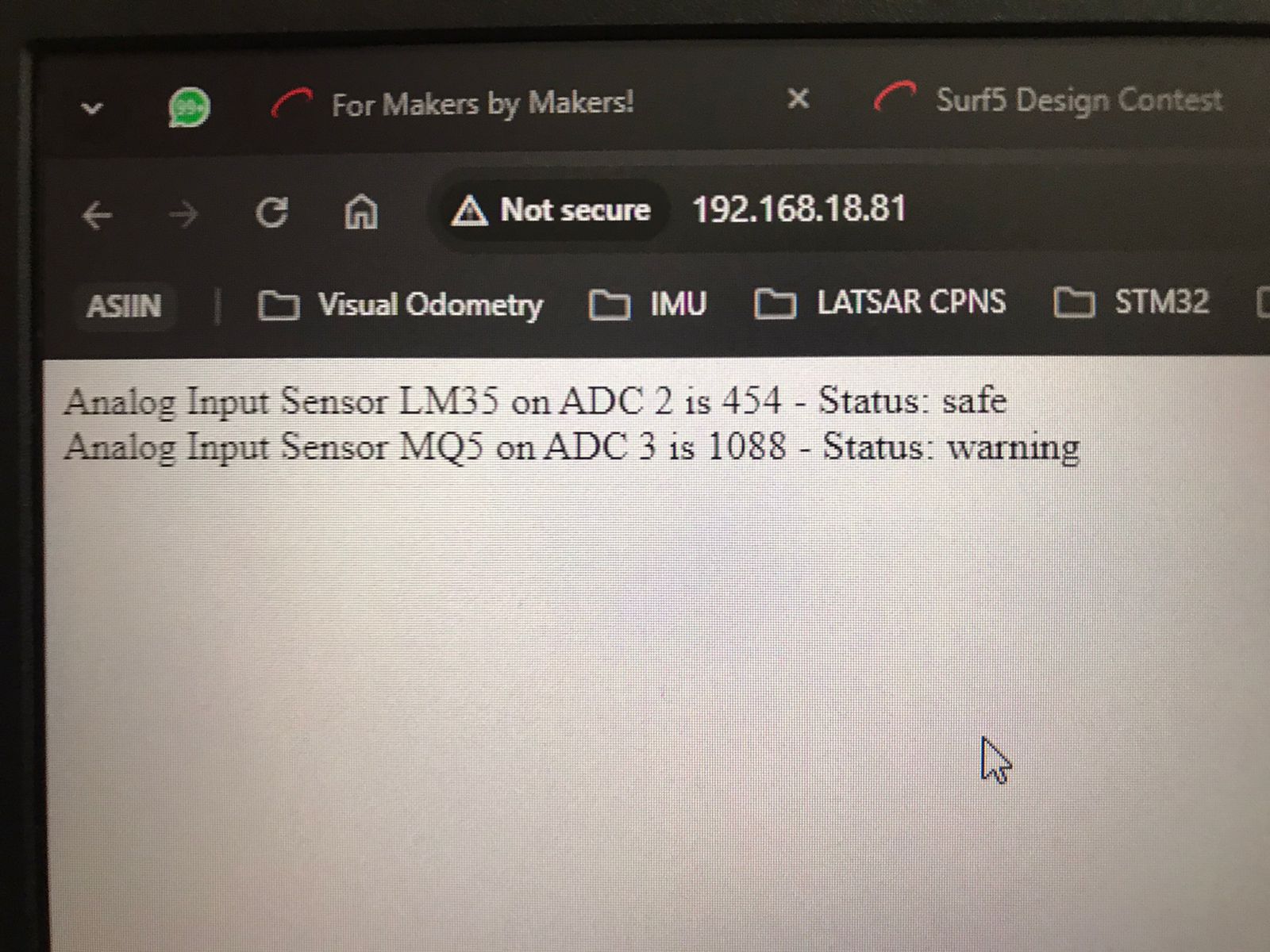
From the trial, can we conclude that our system has been working properly with the function to detect gas and flame which can applied in the kitchen for security. For the modified program, you can see the code below.
/**
******************************************************************************
* @file WZTOE/WZTOE_WebServer/main.c
* @author WIZnet
* @brief Main program body
******************************************************************************
* @attention
*
* <h2><center>© COPYRIGHT 2018 WIZnet</center></h2>
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
* SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
* INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
* CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF
* THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "wizchip_conf.h"
#include "dhcp.h"
/** @addtogroup W7500x_StdPeriph_Examples
* @{
*/
/** @addtogroup WZTOE_WebServer
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
#define DATA_BUF_SIZE 2048
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
static __IO uint32_t TimingDelay;
uint8_t test_buf[DATA_BUF_SIZE];
wiz_NetInfo gWIZNETINFO;
/* Private function prototypes -----------------------------------------------*/
static void UART_Config(void);
static void GPIO_Config(void);
static void DUALTIMER_Config(void);
static void Network_Config(void);
void dhcp_assign(void);
void dhcp_update(void);
void dhcp_conflict(void);
int32_t WebServer(uint8_t sn, uint8_t* buf, uint16_t port);
void delay(__IO uint32_t milliseconds);
void TimingDelay_Decrement(void);
/* Private functions ---------------------------------------------------------*/
/**
* @brief Main program.
* @param None
* @retval None
*/
int main(void)
{
uint32_t ret;
uint8_t dhcp_retry = 0;
SystemInit();
/* SysTick_Config */
SysTick_Config((GetSystemClock() / 1000));
/* Set WZ_100US Register */
setTIC100US((GetSystemClock() / 10000));
UART_Config();
GPIO_Config();
DUALTIMER_Config();
printf("W7500x Standard Peripheral Library version : %d.%d.%d\r\n", __W7500X_STDPERIPH_VERSION_MAIN, __W7500X_STDPERIPH_VERSION_SUB1, __W7500X_STDPERIPH_VERSION_SUB2);
printf("SourceClock : %d\r\n", (int) GetSourceClock());
printf("SystemClock : %d\r\n", (int) GetSystemClock());
/* Initialize PHY */
#ifdef W7500
printf("PHY Init : %s\r\n", PHY_Init(GPIOB, GPIO_Pin_15, GPIO_Pin_14) == SET ? "Success" : "Fail");
#elif defined (W7500P)
printf("PHY Init : %s\r\n", PHY_Init(GPIOB, GPIO_Pin_14, GPIO_Pin_15) == SET ? "Success" : "Fail");
#endif
/* Check Link */
printf("Link : %s\r\n", PHY_GetLinkStatus() == PHY_LINK_ON ? "On" : "Off");
/* Network information setting before DHCP operation. Set only MAC. */
Network_Config();
/* DHCP Process */
DHCP_init(0, test_buf);
reg_dhcp_cbfunc(dhcp_assign, dhcp_update, dhcp_conflict);
if (gWIZNETINFO.dhcp == NETINFO_DHCP) { // DHCP
printf("Start DHCP\r\n");
while (1) {
ret = DHCP_run();
if (ret == DHCP_IP_LEASED) {
printf("DHCP Success\r\n");
break;
}
else if (ret == DHCP_FAILED) {
dhcp_retry++;
}
if (dhcp_retry > 3) {
printf("DHCP Fail\r\n");
break;
}
}
}
/* Network information setting after DHCP operation.
* Displays the network information allocated by DHCP. */
Network_Config();
printf("System Loop Start\r\n");
while (1) {
WebServer(1, test_buf, 80);
}
return 0;
}
/**
* @brief Configures the UART Peripheral.
* @note
* @param None
* @retval None
*/
static void UART_Config(void)
{
UART_InitTypeDef UART_InitStructure;
UART_StructInit(&UART_InitStructure);
#if defined (USE_WIZWIKI_W7500_EVAL)
UART_Init(UART1, &UART_InitStructure);
UART_Cmd(UART1, ENABLE);
#else
S_UART_Init(115200);
S_UART_Cmd(ENABLE);
#endif
}
/**
* @brief Configures the GPIO Peripheral.
* @note GPIO pin configures for ADC
* @param None
* @retval None
*/
static void GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_13 | GPIO_Pin_14;
GPIO_InitStructure.GPIO_Direction = GPIO_Direction_IN;
GPIO_InitStructure.GPIO_Pad = GPIO_Pad_Default;
GPIO_InitStructure.GPIO_AF = PAD_AF0;
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
/**
* @brief Configures the DUALTIMER Peripheral.
* @note
* @param None
* @retval None
*/
static void DUALTIMER_Config(void)
{
DUALTIMER_InitTypDef DUALTIMER_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
DUALTIMER_InitStructure.Timer_Load = GetSystemClock() / 1; //1s
DUALTIMER_InitStructure.Timer_Prescaler = DUALTIMER_Prescaler_1;
DUALTIMER_InitStructure.Timer_Wrapping = DUALTIMER_Periodic;
DUALTIMER_InitStructure.Timer_Repetition = DUALTIMER_Wrapping;
DUALTIMER_InitStructure.Timer_Size = DUALTIMER_Size_32;
DUALTIMER_Init(DUALTIMER0_0, &DUALTIMER_InitStructure);
DUALTIMER_ITConfig(DUALTIMER0_0, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = DUALTIMER0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0x0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
DUALTIMER_Cmd(DUALTIMER0_0, ENABLE);
}
/**
* @brief Configures the Network Information.
* @note
* @param None
* @retval None
*/
static void Network_Config(void)
{
uint8_t mac_addr[6] = { 0x00, 0x08, 0xDC, 0x01, 0x02, 0x03 };
memcpy(gWIZNETINFO.mac, mac_addr, 6);
gWIZNETINFO.dhcp = NETINFO_DHCP;
ctlnetwork(CN_SET_NETINFO, (void*) &gWIZNETINFO);
printf("MAC: %02X:%02X:%02X:%02X:%02X:%02X\r\n", gWIZNETINFO.mac[0], gWIZNETINFO.mac[1], gWIZNETINFO.mac[2], gWIZNETINFO.mac[3], gWIZNETINFO.mac[4], gWIZNETINFO.mac[5]);
printf("IP: %d.%d.%d.%d\r\n", gWIZNETINFO.ip[0], gWIZNETINFO.ip[1], gWIZNETINFO.ip[2], gWIZNETINFO.ip[3]);
printf("GW: %d.%d.%d.%d\r\n", gWIZNETINFO.gw[0], gWIZNETINFO.gw[1], gWIZNETINFO.gw[2], gWIZNETINFO.gw[3]);
printf("SN: %d.%d.%d.%d\r\n", gWIZNETINFO.sn[0], gWIZNETINFO.sn[1], gWIZNETINFO.sn[2], gWIZNETINFO.sn[3]);
printf("DNS: %d.%d.%d.%d\r\n", gWIZNETINFO.dns[0], gWIZNETINFO.dns[1], gWIZNETINFO.dns[2], gWIZNETINFO.dns[3]);
}
/**
* @brief The call back function of ip assign.
* @note
* @param None
* @retval None
*/
void dhcp_assign(void)
{
getIPfromDHCP(gWIZNETINFO.ip);
getGWfromDHCP(gWIZNETINFO.gw);
getSNfromDHCP(gWIZNETINFO.sn);
getDNSfromDHCP(gWIZNETINFO.dns);
ctlnetwork(CN_SET_NETINFO, (void*) &gWIZNETINFO);
}
/**
* @brief The call back function of ip update.
* @note
* @param None
* @retval None
*/
void dhcp_update(void)
{
;
}
/**
* @brief The call back function of ip conflict.
* @note
* @param None
* @retval None
*/
void dhcp_conflict(void)
{
;
}
/**
* @brief WebServer example function.
* @note
* @param sn: Socket number to use.
* @param buf: The buffer the socket will use.
* @param port: Socket port number to use.
* @retval Success or Fail of configuration functions
*/
int32_t WebServer(uint8_t sn, uint8_t* buf, uint16_t port)
{
uint8_t i;
uint8_t adcChannelOffset = 2;
int32_t ret;
uint16_t size = 0;
uint8_t destip[4];
uint16_t destport;
uint8_t adc_buf[128] = { '\0', };
switch (getSn_SR(sn))
{
case SOCK_ESTABLISHED:
if (getSn_IR(sn) & Sn_IR_CON) {
getSn_DIPR(sn, destip);
destport = getSn_DPORT(sn);
printf("%d:Connected - %d.%d.%d.%d : %d\r\n", sn, destip[0], destip[1], destip[2], destip[3], destport);
setSn_IR(sn, Sn_IR_CON);
}
if ((size = getSn_RX_RSR(sn)) > 0) {
if (size > DATA_BUF_SIZE) size = DATA_BUF_SIZE;
ret = recv(sn, buf, size);
if (ret <= 0) return ret;
printf("%s", buf);
ret = send(sn, "HTTP/1.1 200 OK\r\n"
"Content-Type: text/html\r\n"
"Connection: close\r\n"
"Refresh: 5\r\n"
"\r\n"
"<!DOCTYPE HTML>\r\n"
"<html>\r\n", sizeof("HTTP/1.1 200 OK\r\n"
"Content-Type: text/html\r\n"
"Connection: close\r\n"
"Refresh: 5\r\n"
"\r\n"
"<!DOCTYPE HTML>\r\n"
"<html>\r\n") - 1);
if (ret < 0) {
close(sn);
return ret;
}
// for (i = 0; i < 2; i++) {
// ADC_Cmd(ENABLE);
// if(i >= 2) adcChannelOffset = 4;
// else if (i < 2) adcChannelOffset = 2;
// ADC_ChannelConfig(i+adcChannelOffset);
// ADC_StartOfConversion();
// sprintf(adc_buf, "Analog Input Sensor on ADC %d is %d<br />\r\n", i+adcChannelOffset, ADC_GetConversionValue());
// ret = send(sn, adc_buf, strlen(adc_buf));
// if (ret < 0) {
// close(sn);
// return ret;
// }
// ADC_Cmd(DISABLE);
// memset(adc_buf, '\0', 128);
// }
int adcValue1, adcValue2;
char *status1, *status2;
for (i = 0; i < 2; i++) {
ADC_Cmd(ENABLE);
if (i >= 2)
adcChannelOffset = 4;
else
adcChannelOffset = 2;
ADC_ChannelConfig(i + adcChannelOffset);
ADC_StartOfConversion();
// Simpan nilai ADC ke variabel yang sesuai
if (i == 0) {
adcValue1 = ADC_GetConversionValue();
// Tentukan status berdasarkan nilai ADC untuk sensor 1
if (adcValue1 < 500) { // Threshold untuk status safe dan warning
status1 = "safe";
} else {
status1 = "warning";
}
sprintf(adc_buf, "Analog Input Sensor LM35 on ADC %d is %d - Status: %s<br />\r\n", i + adcChannelOffset, adcValue1, status1);
} else {
adcValue2 = ADC_GetConversionValue();
// Tentukan status berdasarkan nilai ADC untuk sensor 2
if (adcValue2 < 1000) { // Threshold untuk status safe dan warning
status2 = "safe";
} else {
status2 = "warning";
}
sprintf(adc_buf, "Analog Input Sensor MQ5 on ADC %d is %d - Status: %s<br />\r\n", i + adcChannelOffset, adcValue2, status2);
}
ret = send(sn, adc_buf, strlen(adc_buf));
if (ret < 0) {
close(sn);
return ret;
}
ADC_Cmd(DISABLE);
memset(adc_buf, '\0', 128);
}
ret = send(sn, "</html>\r\n", sizeof("</html>\r\n") - 1);
if (ret < 0) {
close(sn);
return ret;
}
disconnect(sn);
}
break;
case SOCK_CLOSE_WAIT:
if ((ret = disconnect(sn)) != SOCK_OK) return ret;
printf("%d:Socket Closed\r\n", sn);
break;
case SOCK_INIT:
printf("%d:Listen, Web server, port [%d]\r\n", sn, port);
if ((ret = listen(sn)) != SOCK_OK) return ret;
break;
case SOCK_CLOSED:
if ((ret = socket(sn, Sn_MR_TCP, port, 0x00)) != sn) return ret;
break;
default:
break;
}
return 1;
}
/**
* @brief Inserts a delay time.
* @param nTime: specifies the delay time length, in milliseconds.
* @retval None
*/
void delay(__IO uint32_t milliseconds)
{
TimingDelay = milliseconds;
while (TimingDelay != 0)
;
}
/**
* @brief Decrements the TimingDelay variable.
* @param None
* @retval None
*/
void TimingDelay_Decrement(void)
{
if (TimingDelay != 0x00) {
TimingDelay--;
}
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
/**
* @}
*/
/**
* @}
*/
/******************** (C) COPYRIGHT WIZnet *****END OF FILE********************/
-
Main Program
The program used in this project is based on tutorial with little modification


-
Wiring Diagram
Voltage divider added to MQ5 sensor due to the sensor needs 5V supply but Surf5 just has 3v3 pin with ADC volatge reference is 3v3