
Robotic Agentic Platform for Intelligent Electric Vehicle Disassembly
The growing adoption of electric vehicles (EVs) poses a significant challenge for recycling their batteries


1) Introduction
전기차 보급 확대와 함께 배터리 재활용은 더 이상 선택이 아닌 필수 공정이 되었다. 하지만 EV 배터리 팩 분해는 여전히 수작업 비중이 높고, 팩 구조가 차종마다 크게 다르며, 최대 800V급 고전압 위험까지 존재해 자동화 난도가 높다. RAPID(Robotic Agentic Platform for Intelligent Disassembly)는 이런 문제를 해결하기 위해 제안된 연구 플랫폼으로, 대형 갠트리 기반 로봇, RGB-D 비전, 자동 너트러너, ROS 2 기반 제어, 그리고 LLM 에이전트를 결합해 실제 EV 배터리 분해를 수행한다.
이 논문에서 사용한 대상은 Hyundai Ioniq 5의 풀사이즈 배터리 팩이다. 해당 팩은 길이 2.12m, 폭 1.22m, 무게 약 450kg, 용량 77.4kWh, 동작 전압 800V로 소개되며, 소형 하이브리드 배터리와 달리 작업 공간과 안전 설계 요구사항이 훨씬 크다. 연구진은 먼저 배터리를 0V로 방전한 뒤 전체 분해 과정을 분석했고, 그중 다수의 공정이 나사·너트 제거 작업으로 구성됨을 확인했다.
maker.wiznet.io 관점에서 이 프로젝트가 특히 중요한 이유는 공구 제어부에 RP2040 + W5500 Ethernet 모듈이 사용되었다는 점이다. 논문 속 너트러너 인터페이스 보드는 로봇 PC와 이더넷으로 연결되어 PWM 제어와 전류 측정을 수행하며, 산업 현장에서 요구되는 안정적 유선 통신 구조를 구현한다. 다시 말해, W5500은 단순 네트워크 부품이 아니라 로봇 말단 공구를 제어 도메인과 안전하게 연결하는 핵심 통신 노드 역할을 맡는다.
이 글에서는 논문의 시스템 구조를 maker 스타일로 재구성해, W5500 기반 Ethernet 공구 제어가 실제 로봇 분해 시스템에서 어떻게 활용되는지, 왜 이 구조가 유리한지, 그리고 비슷한 연구·산업 프로젝트에 어떻게 응용할 수 있는지를 단계적으로 설명한다. 논문에 공개되지 않은 세부 회로값이나 전체 소스코드는 명시적으로 추정 또는 예시 코드로 구분해 정리한다.
2) Required Components
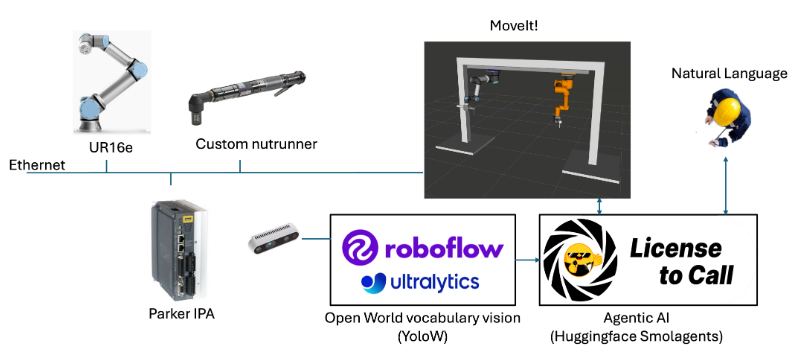
이 프로젝트는 단일 MCU 실습이 아니라 대형 로봇 시스템이다. 따라서 실제 논문 구성과, maker 관점에서 재현 가능한 핵심 블록을 나누어 보는 것이 좋다. 논문 기준 주요 구성은 Universal Robots UR16e, Parker 선형 갠트리, Intel RealSense D435i, AlloyPower ARW801 기반 너트러너, ROS 2 제어 PC, 그리고 Seeed XIAO RP2040 + W5500 Ethernet 모듈이다.
Core Components
- Universal Robots UR16e collaborative robot arm
- Parker-Hannifin linear axis / gantry
- Intel RealSense D435i RGB-D camera
- AlloyPower ARW801 nutrunner with custom Ethernet interface
- Seeed XIAO RP2040
- W5500 Ethernet adapter/module
- MOSFET motor driver stage
- Hall current sensor (W1600 in paper block diagram)
- 12V tool battery
- ROS 2 robot PC running perception, planning, and agent software
Software Stack
- ROS 2 for robot service orchestration
- MoveIt! 2 for path planning and collision avoidance
- YOLO-World for open-vocabulary object detection
- SmolAgents for tool-based LLM agent execution
- GPT-4o-mini / Qwen 3.5 4B / 9B as evaluated agent backends
Safety-Related Hardware
- High-voltage battery discharge setup
- Physical isolation between robot/control domain and floating tool/battery domain
- Force-controlled contact during unscrewing
- Mechanical fixturing for large battery pack handling
3) Hardware Setup
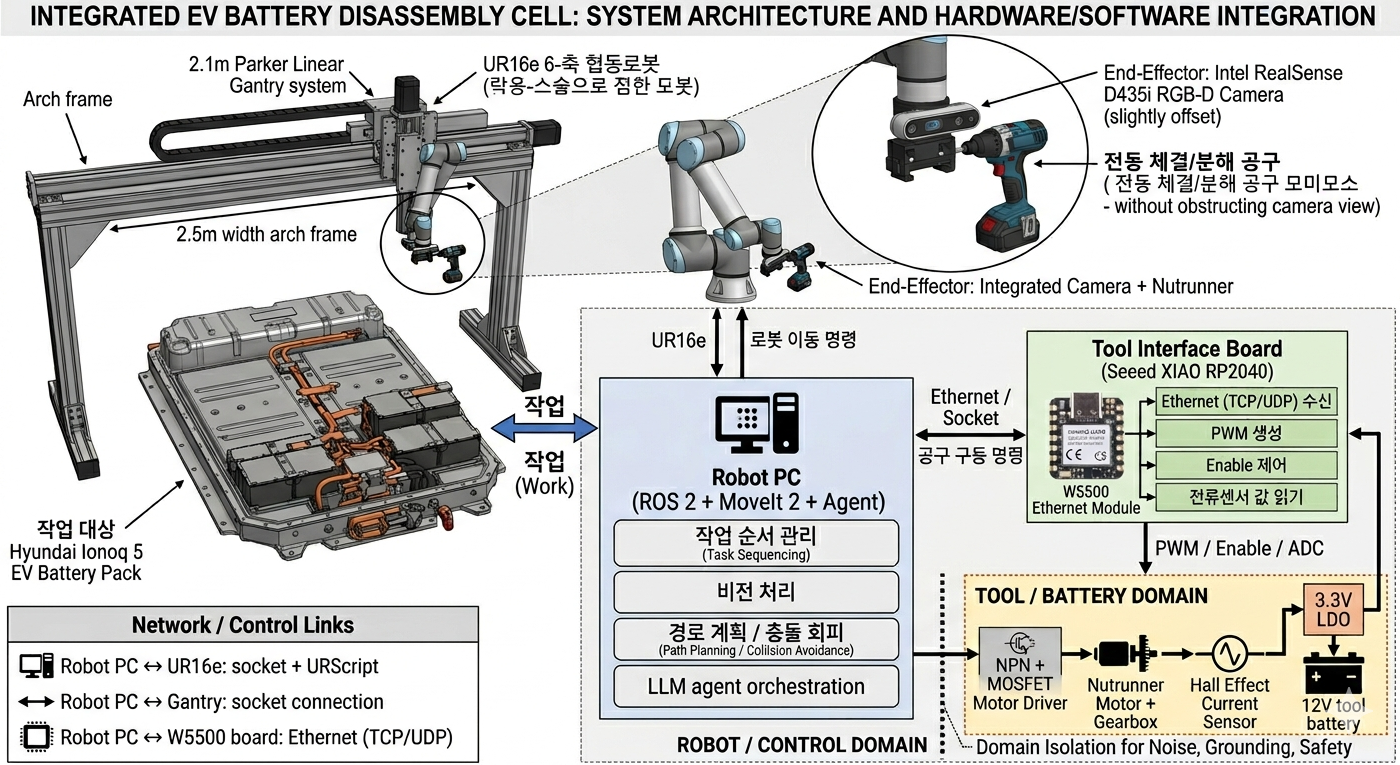
RAPID는 2.5m 폭의 T-slot 아치 구조 위에 2.1m 선형축과 UR16e를 탑재한 형태다. 이 조합은 차량 하부를 가득 채우는 풀사이즈 EV 배터리 팩을 작업하기 위해 선택되었으며, 일반적인 6축 로봇만으로는 커버하기 어려운 긴 작업 범위를 확보한다.
엔드이펙터에는 두 가지가 함께 장착된다. 첫째는 Intel RealSense D435/D435i 카메라이고, 둘째는 실제 나사 제거를 수행하는 너트러너다. 카메라는 공구 시야를 가리지 않도록 약간 오프셋 배치되며, 너트러너의 토크 축은 로봇 마지막 축과 수직이 되도록 설계해 반력(reaction force)이 손목 관절에 집중되지 않게 했다. 이는 반복 체결·분해 작업에서 매우 중요한 기구 설계 포인트다.
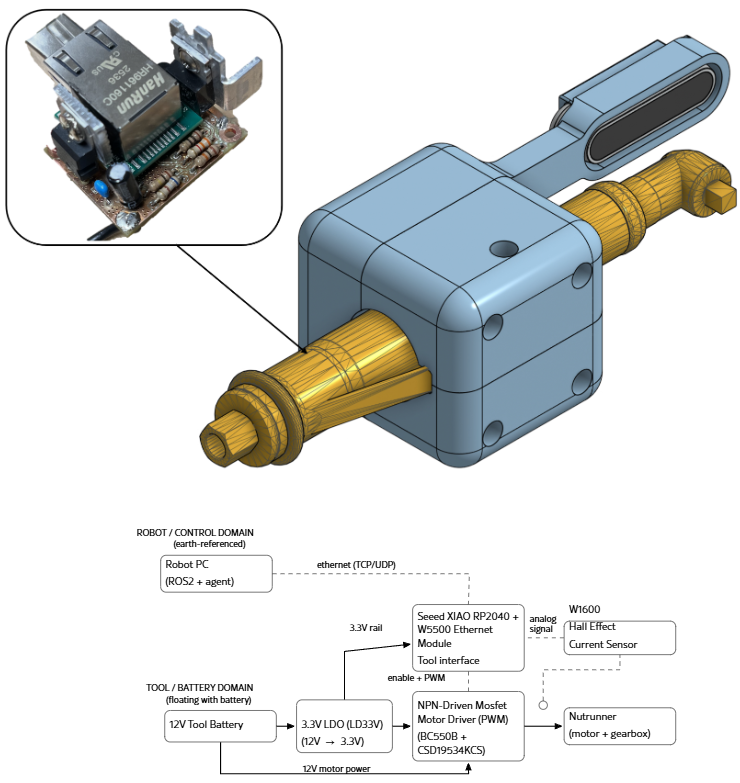
논문에 제시된 블록 다이어그램에서 가장 흥미로운 부분은 공구 제어 인터페이스다. 로봇 PC는 Ethernet을 통해 XIAO RP2040 + W5500 보드와 연결되고, 이 보드는 PWM 신호와 enable 신호를 생성해 MOSFET 드라이버를 구동하며, Hall current sensor 값을 읽어 공구 상태를 모니터링한다. 이 구조는 고전력 모터 제어부를 로봇 상위 제어기와 분리하면서도, 노이즈에 강하고 배선 거리에 유리한 유선 네트워크 연결을 제공한다.
W5500을 사용하면 MCU는 SPI로 Ethernet 칩을 제어하고, 네트워크 프로토콜 처리 대부분은 하드웨어 오프로딩된다. WIZnet 공식 문서에 따르면 W5500은 TCP, UDP, IPv4, ICMP, ARP, IGMP, PPPoE를 지원하는 hardwired TCP/IP 컨트롤러이며, 32KB 내부 버퍼와 최대 8개 하드웨어 소켓을 제공한다. 이런 특성은 공구 제어처럼 짧고 명확한 명령/응답 구조에 적합하다.
4) Interface Explanation
이 프로젝트에는 여러 인터페이스가 동시에 사용된다. maker 프로젝트로 옮겨 이해하려면 각 인터페이스의 역할을 분리해서 보는 것이 좋다.
SPI
XIAO RP2040 ↔ W5500 사이 연결은 SPI다. RP2040이 W5500의 레지스터와 소켓 버퍼를 제어하고, 실제 Ethernet 프레임 송수신은 W5500이 담당한다. W5500은 SPI 기반으로 MCU와 연결되며, 네트워크 처리를 하드웨어로 수행해 MCU 부하를 줄인다.
Ethernet (TCP/UDP)
Robot PC ↔ W5500 tool interface 구간은 Ethernet이다. 논문 블록도에는 TCP/UDP로 표시되어 있으며, 이 링크를 통해 공구 enable, PWM duty, 상태 조회, 전류 측정값 전송 같은 메시지를 주고받는 구조로 해석할 수 있다. Ethernet을 사용하면 USB 직결보다 배치 자유도가 높고, 산업용 셀 내에서 네트워크 기반 확장이 쉬워진다.
PWM
RP2040 ↔ MOSFET motor driver 구간은 PWM이다. 논문에서는 너트러너 속도를 조절하기 위해 내장 버튼 회로를 복제했고, 이를 Ethernet을 통해 원격 제어하도록 개조했다고 설명한다. 즉, W5500은 통신부, RP2040은 실시간 제어부, MOSFET 드라이버는 동력 제어부 역할을 맡는다.
Analog Sensing
Hall effect current sensor는 너트러너 구동 전류를 측정해, 공구가 실제로 체결부와 맞물렸는지 또는 과부하가 발생했는지를 판단하는 데 활용될 수 있다. 논문은 향후 current sensing을 활용한 재시도 로직이 성능 개선 포인트라고 명시했다.
ROS 2 / MoveIt 2
상위 레벨에서는 ROS 2 서비스와 MoveIt 2가 로봇 이동, 경로 생성, 충돌 회피를 담당한다. UR16e는 socket interface로 URScript 명령을 받으며, 갠트리 또한 별도 소켓 연결로 제어된다. 이처럼 하위는 Ethernet 기반 공구 제어, 상위는 ROS 2 서비스 기반 제어가 결합된 다층 구조다.
Agentic AI Tool Interface
LLM은 직접 모터를 구동하지 않는다. 대신 SmolAgents가 structured tool call 또는 ROS 기반 MCP를 통해 고수준 명령을 실행한다. 논문에서는 명시적 tool interface가 20회 시험에서 100% 성공한 반면, 자동 ROS 서비스 탐색 방식은 실패율이 높았다고 보고했다. 이는 로봇/공구 제어를 위한 API 설계가 LLM 성능만큼 중요하다는 것을 보여준다.
5) Software Environment Setup
논문 시스템은 ROS 2, MoveIt 2, YOLO-World, SmolAgents를 포함하는 복합 소프트웨어 스택이다. 실험 환경 전체를 그대로 재현하기는 쉽지 않지만, maker 관점에서는 아래와 같은 계층으로 구축하면 이해와 재사용이 쉬워진다.
A. Tool MCU Firmware
RP2040 펌웨어는 다음 기능을 수행한다.
- W5500 초기화
- 고정 IP 또는 DHCP 설정
- TCP 또는 UDP 포트 리스닝
- 수신 명령 파싱
- PWM 출력 및 enable 제어
- ADC 기반 전류값 반환
Seeed의 XIAO W5500 예제는 Ethernet 초기화, IP 할당, 기본 웹/네트워크 동작의 출발점으로 사용할 수 있다.
B. Robot PC Layer
Robot PC에는 ROS 2와 MoveIt 2를 설치하고, 다음 노드 구성을 갖추는 것이 적절하다.
- robot_motion_node
- vision_detection_node
- tool_control_node
- task_memory_node
- llm_agent_node
논문에서는 UR16e와 갠트리를 socket interface로 제어하고, 전체 동작은 MoveIt 2가 경로 계획과 충돌 회피를 담당한다.
C. Vision Stack
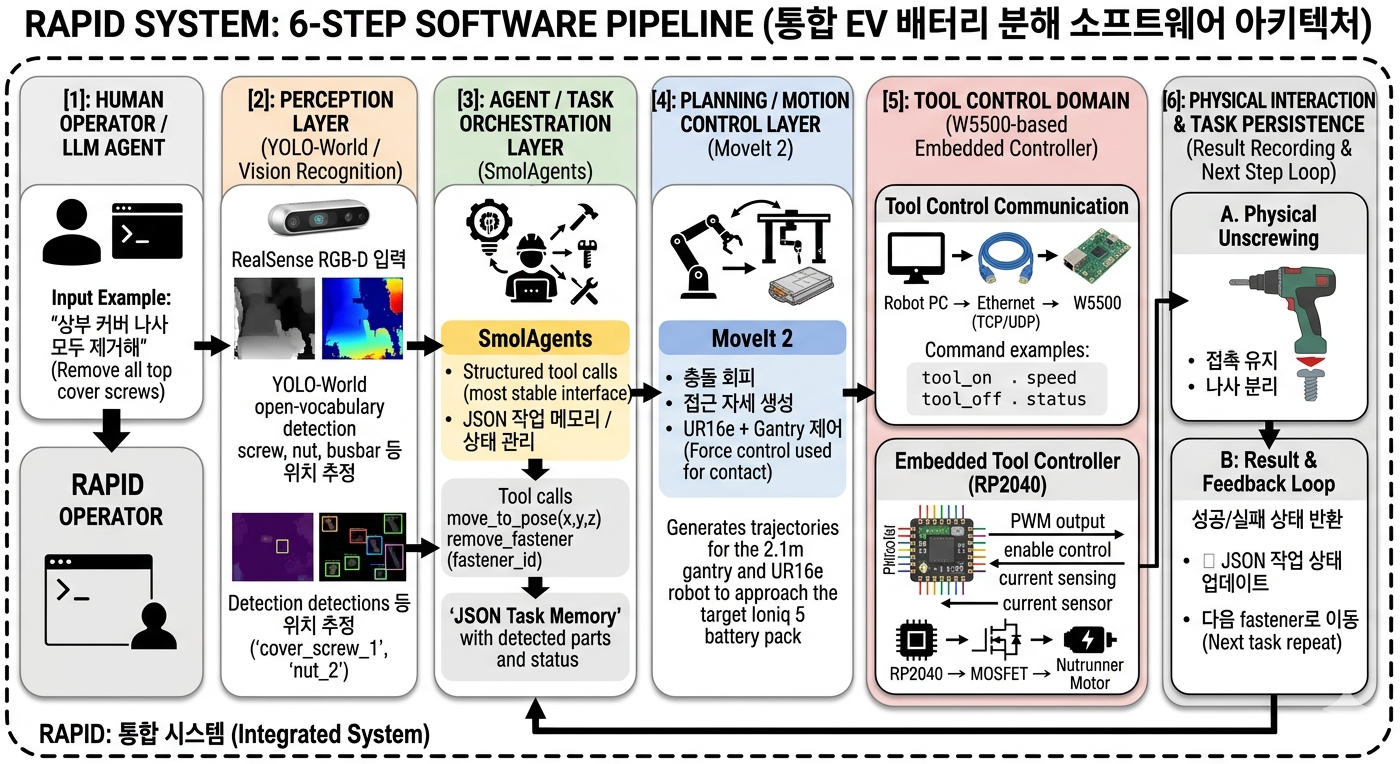
YOLO-World 기반 open-vocabulary detection은 “screw”, “nut”, “busbar”, “orange cover” 같은 텍스트 라벨로 부품을 찾는다. 이 방식은 고정된 클래스 ID 대신 텍스트 기반 식별자를 사용하므로, 에이전트 AI와의 연결성이 높다. 논문에서는 이 파이프라인이 mAP50 0.9757을 달성했다고 보고했다.
D. Agent Stack
SmolAgents는 로봇 기능을 직접 생성하는 것이 아니라, 정의된 tool을 호출한다. 논문 결과에 따르면 명시적 tool wrapper 방식이 자동 MCP 서비스 탐색보다 신뢰성이 높았다. 따라서 실제 시스템 설계 시에도 move_to_pose, remove_fastener, query_parts, update_part_status 같은 명확한 API를 먼저 설계하는 것이 바람직하다.
6) Conclusion
RAPID는 단순한 로봇 팔 데모가 아니라, 대형 EV 배터리 분해라는 매우 현실적인 산업 문제를 겨냥한 통합 연구 플랫폼이다. 이 시스템은 갠트리 기반 로봇, RGB-D 비전, MoveIt 2 계획, 오픈월드 객체 인식, 그리고 LLM 에이전트를 하나의 작업 셀로 결합했다. 그 안에서 W5500 기반 Ethernet 공구 제어는 말단 액추에이터를 네트워크화하고 상위 로봇 제어와 안정적으로 연결하는 중요한 역할을 수행한다.
논문 결과는 세 가지 메시지를 명확히 보여준다. 첫째, 반복적인 fastener removal은 이미 상당 수준 자동화가 가능하다. 둘째, 비전과 시각 서보는 taught-in 방식 대비 더 유연하지만 아직 정확도와 속도의 trade-off가 있다. 셋째, LLM을 로봇에 연결할 때는 “똑똑한 모델”보다 “명확한 tool API”가 더 중요하다.
maker.wiznet.io 관점에서 이 프로젝트의 핵심 포인트는 분명하다. W5500은 로봇 말단 공구를 Ethernet 기반 스마트 디바이스로 바꾸는 실전형 인터페이스 칩이며, 산업용 자동화, 분산 제어, 원격 공구 관리, AI 연동 장비 설계에 매우 강력한 기반이 된다. EV 재활용, 스마트 팩토리, 협업 로봇 툴링을 고민하는 개발자라면, 이 논문은 W5500이 단순 IoT를 넘어 실제 산업 로봇 시스템에서도 충분히 유효하다는 좋은 사례가 된다.
1. W5500은 EV 배터리 분해 로봇에서 어떤 역할을 하나요?
W5500은 EV 배터리 분해 로봇의 전동 공구를 Ethernet으로 제어하는 핵심 통신 칩입니다.
이 프로젝트에서는 RP2040과 W5500을 조합해 너트러너의 PWM 제어, enable 신호, 전류 모니터링을 네트워크 기반으로 처리합니다. 그 결과 로봇 PC는 공구를 안정적으로 원격 제어할 수 있고, USB보다 긴 배선과 산업 환경에 더 적합한 유선 통신 구조를 구현할 수 있습니다.
2. EV 배터리 분해 자동화에 W5500 기반 Ethernet 제어가 중요한 이유는 무엇인가요?
W5500 기반 Ethernet 제어는 안정성, 확장성, 산업 적용성 면에서 유리하기 때문입니다.
EV 배터리 분해 작업은 고전압과 대형 구조물 때문에 신뢰성 높은 통신이 필요합니다. W5500은 하드웨어 TCP/IP 오프로딩을 제공해 MCU 부담을 줄이고, 공구 제어부를 상위 로봇 제어 시스템과 분리해 설계할 수 있게 해줍니다. 이 방식은 분산형 공구 제어, 유지보수, 셀 확장에도 적합합니다.
3. RAPID 플랫폼은 EV 배터리 재활용 공정에 어떤 가능성을 보여주나요?
RAPID 플랫폼은 EV 배터리 재활용 공정이 로봇과 AI로 자동화될 수 있음을 보여줍니다.
이 시스템은 ROS 2, MoveIt 2, RGB-D 비전, 너트러너, 그리고 LLM 에이전트를 결합해 배터리 팩의 나사 제거와 분해 작업을 수행합니다. 특히 반복적인 fastener removal 공정을 자동화함으로써 작업자 안전을 높이고, 재활용 가치가 높은 부품을 더 정밀하게 분리할 수 있는 가능성을 제시합니다.