
Positional Pneumatic Actuator Development for a Coordinate Mechanism with Long-Stroke Movements...
Positional Pneumatic Actuator Development for a Coordinate Mechanism with Long-Stroke Movements and Improved Operational Characteristics
공압 액추에이터는 압축공기의 에너지로 직선운동이나 회전운동을 만드는 구동장치입니다. 가장 흔한 형태는 실린더형으로, 공기를 넣어 피스톤을 밀어 왕복 운동을 만들고, 그 힘으로 물체를 밀기·당기기·고정하기·이송합니다. 공압은 구조가 비교적 단순하고, 빠르게 동작하며, 전기 스파크 위험이 낮고, 청정 환경에 맞추기 쉬워 자동화 현장에서 널리 쓰입니다.
주로 쓰이는 산업은 다음과 같습니다. 제조 자동화 라인에서는 픽앤플레이스, 클램핑, 프레스, 이송에 많이 쓰이고, 포장 설비에서는 제품 밀기, 정렬, 봉합 보조, 밸브 자동화에서는 공정 밸브 개폐, 로봇·머티리얼 핸들링에서는 그리퍼와 보조 축 구동에 자주 사용됩니다. 이런 적용이 많은 이유는 공압이 비교적 저렴하고, 반복 동작에 강하며, 유지보수가 단순한 편이기 때문입니다.
다만 공압 액추에이터는 원래 정밀 위치제어에는 불리한 편입니다. 이유는 공기의 압축성, 실린더 내부 압력 동특성, 밸브 유량 변화, 마찰, 낮은 강성, 응답 지연 같은 비선형 요소가 겹치기 때문입니다. 그래서 “빨리 움직이는 것”은 잘하지만, “아주 정확하게 멈추는 것”은 전기 서보보다 어려운 경우가 많습니다. 이 점은 공압 서보 위치제어 관련 리뷰들에서도 반복해서 지적됩니다.
질문하신 논문의 핵심도 바로 여기입니다. 저자들은 복잡한 전자장치를 많이 쓰지 않고도, 로드리스 실린더, 제트 제어 시스템, 외부 브레이크를 조합해 장거리 좌표 운동용 위치 제어형 공압 액추에이터를 만들었다고 설명합니다. 논문이 제시한 성능은 최대 스트로크 6 m, 위치 정확도 200 μm, 이산 스텝 2 mm, 평균 속도 0.15 m/s입니다. 또한 수학 모델과 실험 장치 결과의 차이는 18% 이하였다고 보고합니다.
기존 대비 얼마나 개선됐는지를 논문 표현대로 말하면, 저자들은 이 설계가 전기기계식 드라이브(electromechanical drives) 대비 기술적·경제적·운용적 성능이 약 2배(two-fold) 향상됐다고 주장합니다. 또 초록 말미에서는 전기기계식 유사 시스템 대비 기술·경제 지표가 2배 개선됐다고 다시 적고 있습니다. 즉, 논문 저자들의 공식 주장 자체는 “대략 2배 개선”입니다.
다만 여기서 중요한 점이 하나 있습니다. 이 논문 초록 공개 정보만으로는 무엇이 정확히 2배인지 세부 항목별 분해표는 보이지 않습니다. 예를 들어 “정확도가 2배”, “비용이 2배 절감”, “속도가 2배”처럼 각각 따로 수치화한 표는 초록에 없고, 저자들은 이를 종합적인 technical, economic, operational performance 개선으로 표현합니다. 그래서 현재 확인 가능한 범위에서 가장 정확한 해석은 이렇습니다:
개별 성능 항목 하나가 정확히 2배 좋아졌다고 단정하기보다는, 전체 시스템 지표를 종합 평가했을 때 전기기계식 대안보다 약 2배 우수하다고 저자들이 평가했다는 뜻입니다.
쉽게 풀면, 이 논문은 기존 공압의 약점인 “정밀 정지 어려움”을 전자식 복잡 제어를 크게 늘리지 않고,
- 긴 거리 이동은 로드리스 실린더가 맡고
- 동작 제어는 제트 제어 시스템이 보완하고
- 목표 위치 고정은 외부 브레이크가 담당하는 식으로 역할 분담해서 해결하려고 한 것입니다.
즉, “공압은 장거리 이동에 유리하지만 정밀 위치제어가 어렵다”는 기존 인식을, 구조적 조합으로 상당 부분 극복했다는 점이 포인트입니다.
한 줄로 정리하면 이렇습니다.
공압 액추에이터는 압축공기로 움직이는 산업용 구동장치이고, 주로 자동화·포장·이송·밸브 제어에 쓰입니다. 이 논문은 장거리 좌표 운동에서 공압의 정밀도 한계를 줄인 새 구조를 제안했고, 저자 주장 기준으로는 기존 전기기계식 대안 대비 종합 성능이 약 2배 개선되었습니다.
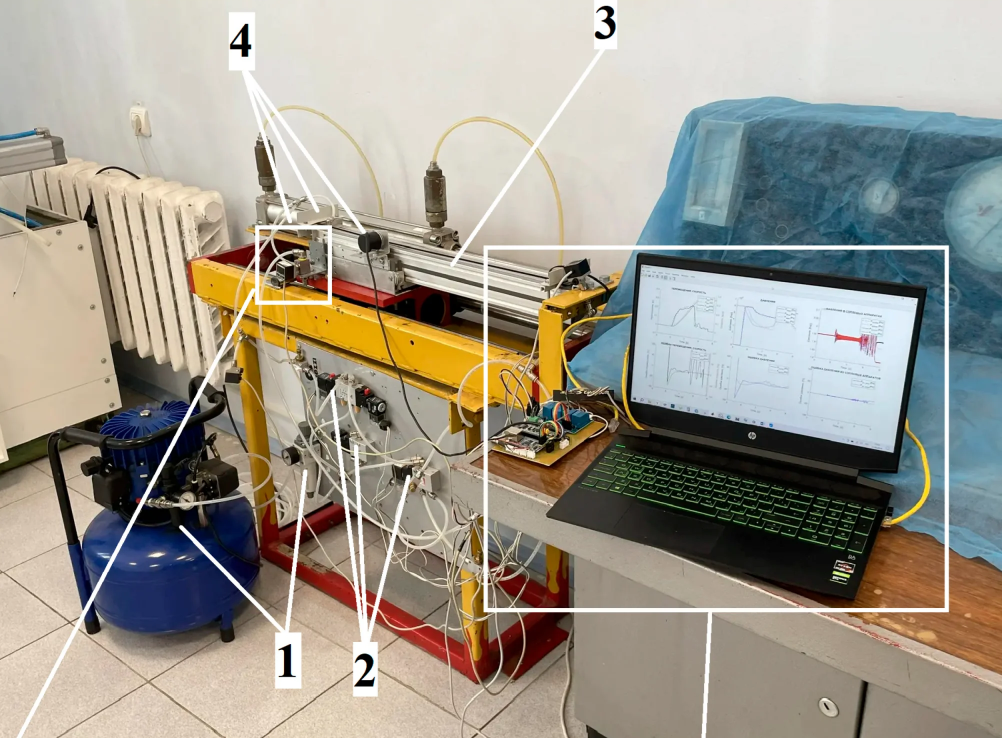
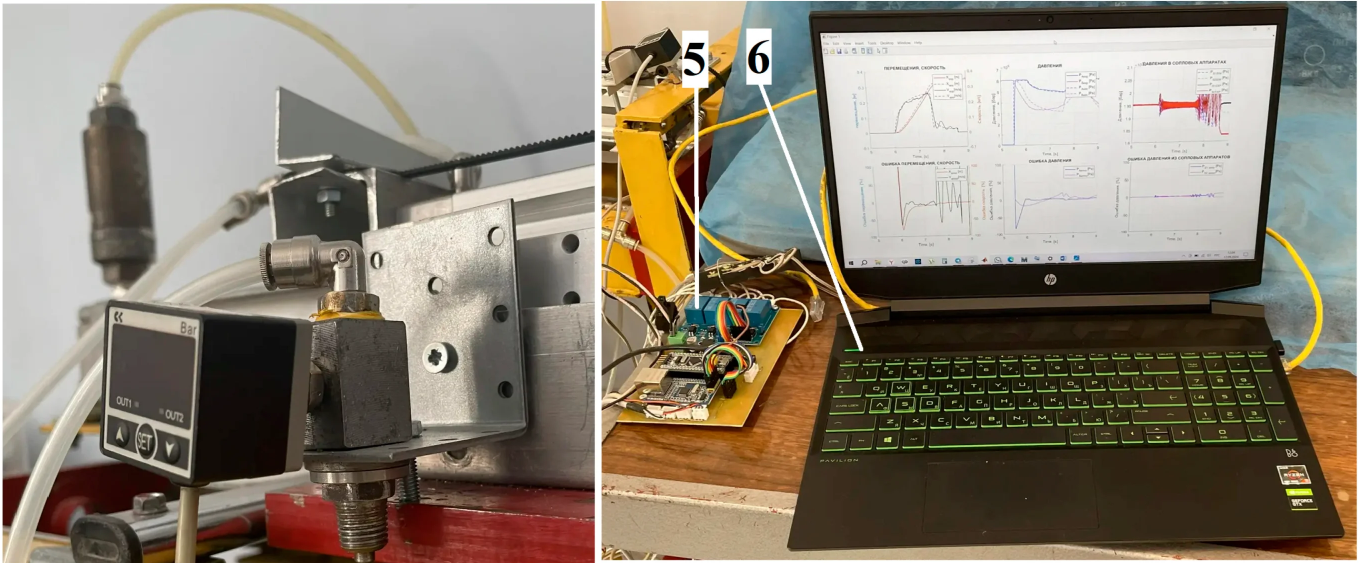
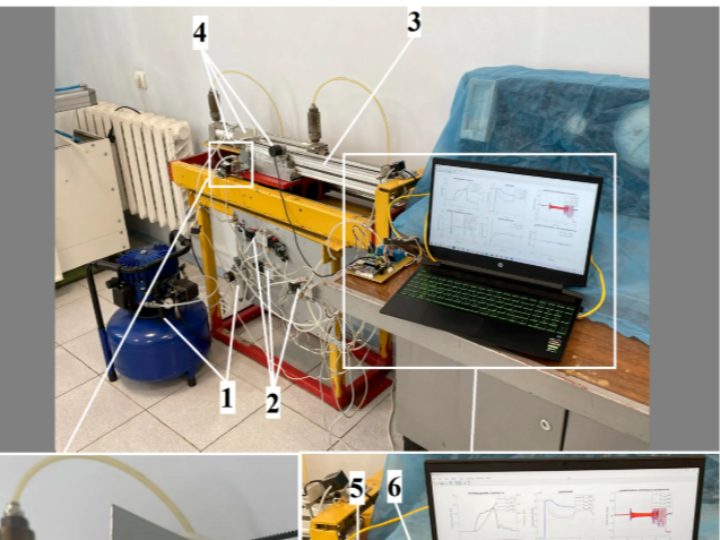
1—에너지 하위 시스템; 2—구동 제어 장치; 3—로더의 장거리 이동을 위한 주 공압 실린더; 4—제트 센서 및 외부 제동 장치 형태의 제어 시스템; 5—전기 하위 시스템; 6—개인용 컴퓨터.
1) Introduction
공압 시스템은 긴 이동 거리, 비교적 단순한 기계 구조, 높은 내환경성이라는 장점이 있지만, 정밀 위치 제어에서는 전기 서보 시스템보다 불리하다고 여겨지는 경우가 많습니다. 특히 장행정 좌표 메커니즘에서는 리드스크루나 벨트, 랙앤피니언 기반 전기기계식 시스템이 자주 쓰이지만, 비용 증가와 구조 대형화, 긴 이동거리에서의 설계 부담이 뒤따릅니다.
이 논문은 바로 이 지점에 주목합니다. 연구진은 장행정 환경에서도 충분한 위치 정밀도와 반복성을 확보할 수 있는 새로운 공압식 위치결정 액추에이터 구조를 제안했습니다. 핵심은 공압 구동의 단순성과 장행정 적합성을 유지하면서도, 위치결정에 필요한 정밀 제어를 위해 별도의 제어 및 제동 요소를 결합하는 것입니다. 논문에 따르면 이 시스템은 로드리스 실린더, 제트 제어 시스템, 외부 브레이크의 조합을 통해 긴 스트로크에서도 높은 성능을 확보하도록 설계되었습니다.
또한 연구진은 SimInTech 기반 수학 모델을 구성했고, 자체 제작한 실험 장치를 통해 계산 결과와 실험 결과를 비교했습니다. 그 결과, 계산값과 실험값의 오차는 18% 이하였으며, 하중 및 운동학적 조건이 위치 정확도에 미치는 영향도 정리했습니다. 이는 실제 설계 단계에서 구동기 사양을 빠르게 추정하는 데 유용한 근거가 됩니다.
2) Required Components
논문은 상용 메이커 부품 BOM보다는 산업용 메카트로닉 모듈 관점의 구성요소를 다룹니다. 공개된 초록 기준으로 필요한 핵심 구성은 다음과 같습니다.
Core Mechanical and Pneumatic Components
- Rodless Pneumatic Cylinder
장행정 이동을 담당하는 핵심 구동부입니다. 로드가 외부로 길게 돌출되지 않기 때문에 긴 스트로크에 유리합니다. - Jet Control System
공기 흐름을 이용해 구동 상태를 제어하는 핵심 제어부입니다. 전통적인 전기 서보 제어와는 다른 공압식 제어 특성을 가집니다. - External Braking Device
위치를 고정하고 정지 정확도를 높이기 위한 외부 브레이크입니다. - Pneumatic Sensors
위치결정과 상태 인식을 위한 센서 계열입니다. 논문 키워드에도 pneumatic sensor가 포함됩니다. - Compressed Air Supply Unit
레귤레이터, 필터, 밸브, 배관을 포함하는 공기 공급 계통입니다. - Coordinate Mechanism Frame
장행정 이송 구조를 지지하는 프레임 또는 가이드 시스템입니다. - Experimental Test Stand
연구 검증을 위한 전용 시험 장치입니다.
Optional Digital Control Extensions for Maker-Level Reproduction
논문 초록에는 MCU나 Ethernet 제어 보드는 직접 언급되지 않지만, maker 프로젝트로 확장한다면 다음 요소를 추가할 수 있습니다.
- MCU 또는 PLC
- 솔레노이드 밸브 드라이버
- 압력 센서 및 리니어 포지션 센서
- 원격 모니터링용 Ethernet/Wi-Fi 모듈
- 데이터 로깅용 PC 또는 산업 HMI
즉, 원 논문은 순수 공압 구동 구조와 모델 검증이 중심이며, 디지털 네트워크 제어는 확장 가능한 응용 영역으로 보는 것이 정확합니다.
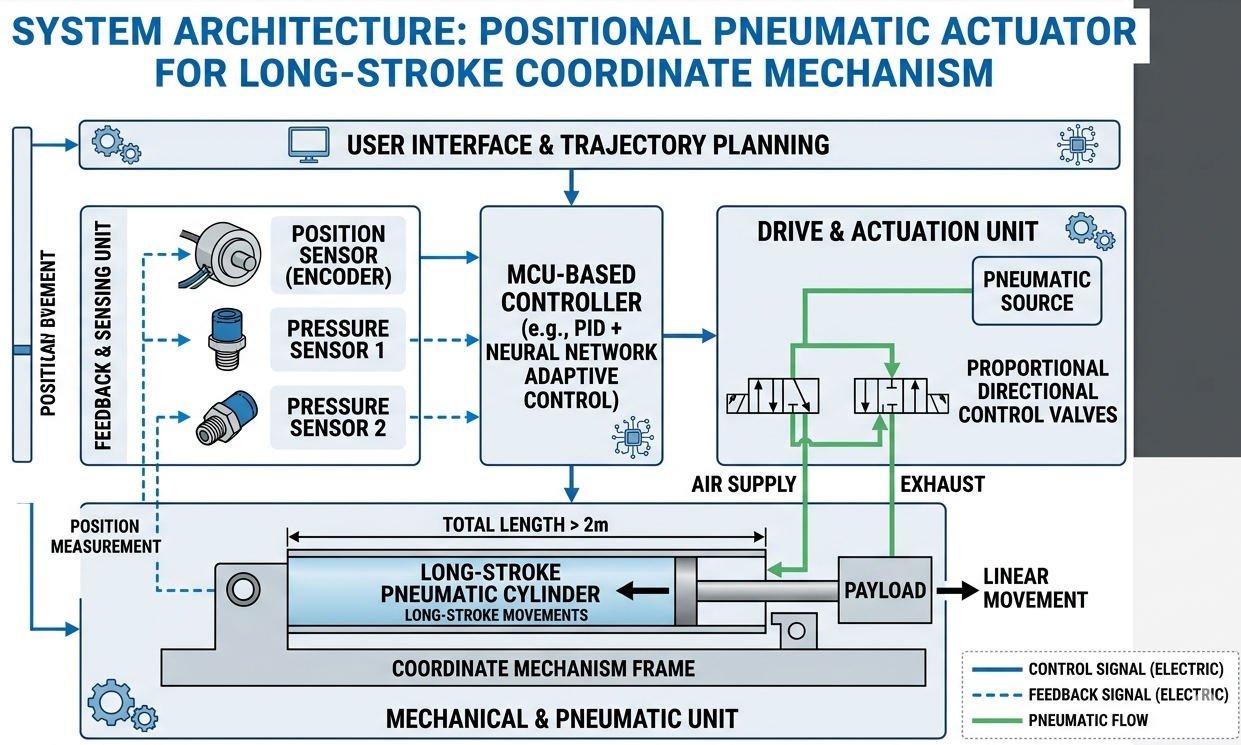
3) Hardware Setup
하드웨어 구성은 세 개의 핵심 블록으로 나눠 이해할 수 있습니다.
A. Motion Generation Block
로드리스 공압 실린더가 실제 장행정 이동을 만듭니다. 일반적인 로드형 실린더보다 설치 공간 효율이 좋고, 긴 거리 이송에 적합합니다. 좌표 메커니즘의 캐리지 또는 슬라이더가 이 실린더에 연결되어 움직입니다.
B. Pneumatic Control Block
제트 제어 시스템은 공기 흐름 기반의 제어를 담당합니다. 이 부분은 전자식 모터 드라이브의 PWM 제어처럼 직접 전류를 다루는 개념이 아니라, 공압 흐름 특성과 압력 변화, 밸브 또는 노즐 특성을 활용한 제어 영역입니다. 논문의 핵심 기여 중 하나가 바로 이 제트 제어 구조를 장행정 위치결정 시스템에 통합했다는 점입니다.
C. Position Holding Block
외부 브레이크는 목표 위치에 도달한 뒤 슬라이더를 안정적으로 고정하는 역할을 합니다. 공압 액추에이터는 정지 후 미세한 진동이나 외란에 영향을 받을 수 있는데, 외부 브레이크는 이러한 문제를 보완해 정지 정확도와 반복성을 높입니다.
D. Sensing and Validation Block
논문 키워드상 pneumatic sensor가 포함되며, 실험 스탠드에서 성능 검증이 수행되었습니다. 따라서 실제 시스템은 압력, 위치, 하중 상태를 계측하는 센서 및 데이터 취득 체계를 포함하는 것으로 해석할 수 있습니다.
4) Interface Explanation
이 프로젝트는 SPI, UART, I2C 같은 전자 인터페이스보다 공압 인터페이스와 메카트로닉 인터페이스가 더 중요합니다. maker.wiznet.io 형식에 맞춰 인터페이스를 재정리하면 다음과 같습니다.
Pneumatic Interface
- 압축 공기 입력
- 레귤레이터를 통한 압력 조절
- 제트 제어 시스템으로의 분기
- 실린더 챔버로의 공급/배기 제어
- 브레이크 장치 제어용 공압 라인
Mechanical Interface
- 로드리스 실린더와 이동 캐리지 연결
- 가이드 레일 또는 프레임 고정
- 외부 브레이크와 슬라이더 접점 정렬
- 하중 장착 포인트
Sensor Interface
- 위치 검출 센서
- 압력 센서
- 브레이크 상태 센서
- 시험용 데이터 취득 인터페이스
Digital Interface (Optional Extension)
논문 초록에는 명시되지 않았지만, 실제 자동화 시스템으로 구현하려면 다음과 같이 확장할 수 있습니다.
- MCU ↔ 밸브 드라이버: GPIO / PWM
- MCU ↔ 압력 센서: ADC / I2C
- MCU ↔ 위치 센서: ADC / Encoder interface
- MCU ↔ Ethernet module: SPI
- PLC/HMI ↔ supervisory system: Ethernet/Modbus/TCP
즉, 논문의 본질은 전자 인터페이스가 아니라 공압 흐름 제어와 기계적 제동을 결합한 위치결정 인터페이스 설계에 있습니다.
5) Use Cases & Market Potential
이 연구는 단순한 학술 시연보다 실제 산업 시스템에 가까운 성격을 가집니다.
Potential Use Cases
- 장행정 좌표 이송 시스템
- 자동 창고 및 이송 설비
- 산업용 포지셔닝 장치
- 대형 가공기 주변 보조 이송 모듈
- 환경 내성이 필요한 자동화 라인
- 비용 민감형 장행정 자동화 설비
Why the Market Cares
논문이 강조하는 핵심은 공압식 구조를 통해 장행정 환경에서 전기기계식 대안 대비 기술적·경제적·운용적 지표를 2배 수준으로 개선했다는 점입니다. 이런 주장이 실제 산업 현장에서 그대로 재현되려면 추가 검증이 필요하지만, 적어도 연구 단계에서는 장거리 이송 + 정밀 정지 + 비교적 단순한 구조라는 조합이 충분히 매력적인 제안입니다.
또한 전동 서보 축이 부담스러운 길이, 비용, 유지보수 환경에서는 공압 위치결정 시스템이 다시 주목받을 수 있습니다. 특히 먼지, 진동, 유지관리 단순성, 설비 단가가 중요한 산업 현장에서는 공압 구동이 여전히 강점을 가집니다.
6) Module/Chip Technical Overview
이 항목은 일반적인 maker 프로젝트라면 MCU나 Ethernet 칩셋 설명이 들어가지만, 본 논문은 그러한 전자 모듈보다 공압 메카트로닉 모듈이 핵심입니다.
Rodless Pneumatic Cylinder
장행정 구동의 핵심입니다. 일반 로드형 실린더 대비 구조적으로 긴 거리 이송에 유리하며, 설치 공간 활용성이 좋습니다.
Jet Control System
논문의 핵심 차별점입니다. 공기 흐름 제어를 통해 위치결정 성능을 보완하는 장치로 해석할 수 있습니다. 전기 서보 제어와 달리 공압 특유의 비선형성과 압력 응답을 다루는 것이 중요합니다.
External Braking Device
정지 후 위치 유지를 담당합니다. 장행정 시스템에서 이동 자체보다 최종 정지 안정성이 더 어려울 수 있는데, 외부 브레이크는 그 부분을 해결하는 역할을 합니다.
Pneumatic Sensors
압력 상태, 동작 단계, 위치 결정 보조 정보를 제공하는 센서 계열입니다. 논문 키워드에 포함된 만큼, 단순 구동이 아니라 측정 가능한 메카트로닉 시스템이라는 점이 중요합니다.
SimInTech Mathematical Model
연구진은 이 시스템의 거동을 설명하는 수학 모델을 구축했고, 이를 실험 결과와 비교했습니다. 이 모델 기반 접근은 실제 설비 설계 시간을 줄이는 데 도움을 줄 수 있다고 논문은 설명합니다.
7) Conclusion
이 논문은 장행정 좌표 메커니즘을 위한 새로운 공압 위치결정 액추에이터 구조를 제안하고, 모델링과 실험을 통해 그 가능성을 검증했습니다. 핵심 아이디어는 단순한 공압 실린더 사용이 아니라, 로드리스 실린더 + 제트 제어 + 외부 브레이크를 하나의 위치결정 시스템으로 통합한 점입니다. 공개된 메타데이터 기준으로 이 시스템은 200 μm 정확도, 2 mm 스텝, 0.15 m/s 평균 속도, 6 m 스트로크를 달성했으며, 기존 전기기계식 대안 대비 성능 지표에서 약 2배 개선을 보고했습니다.
maker 관점에서 보면 이 프로젝트는 즉시 복제 가능한 DIY 회로 프로젝트라기보다는, 산업용 공압 자동화 시스템을 연구·개발 관점에서 이해하고 확장하는 참고 설계에 가깝습니다. 그러나 바로 그 점이 이 논문의 가치이기도 합니다. 일반적으로 정밀 위치 제어는 전동 서보의 전유물처럼 여겨지지만, 이 연구는 공압 시스템도 구조 설계와 제동 메커니즘을 적절히 결합하면 충분히 경쟁력 있는 대안이 될 수 있음을 보여줍니다. 장행정, 비용 효율, 구조 단순화가 중요한 자동화 설비를 고민하는 엔지니어라면 한 번쯤 주목할 만한 접근입니다.
1. 공압 액추에이터란 무엇인가요?
공압 액추에이터는 압축공기의 힘으로 직선 또는 회전 운동을 만들어내는 구동장치입니다. 주로 자동화 설비, 포장기계, 산업용 이송장치, 밸브 제어 시스템에서 사용됩니다. 이 논문에서는 장거리 좌표 운동에 적합하도록 로드리스 실린더, 제트 제어 시스템, 외부 브레이크를 결합한 위치 제어형 공압 액추에이터를 제안합니다.
2. 이 논문에서 제안한 공압 액추에이터의 핵심 특징은 무엇인가요?
이 논문의 핵심은 복잡한 전자 장치를 최소화하면서도 장거리 이동과 정밀 위치 제어를 동시에 달성했다는 점입니다. 제안된 시스템은 최대 6m 스트로크, 200μm 위치 정확도, 2mm 스텝 이동, 평균 속도 0.15m/s 성능을 목표로 설계되었으며, 장행정 좌표 메커니즘에 적합한 구조를 제공합니다.
3. 기존 방식 대비 얼마나 개선되었나요?
논문에 따르면 제안된 위치 제어형 공압 액추에이터는 기존 전기기계식 드라이브와 비교했을 때 기술적, 경제적, 운용적 지표에서 약 2배 향상된 성능을 보였습니다. 즉, 공압 시스템이 가진 압축성 및 열역학적 한계를 구조적 설계와 제어 방식으로 보완해 장거리 위치 제어에서 더 경쟁력 있는 대안이 될 수 있음을 보여줍니다.