
Development of an Autonomous Rabbit for Running on a Track.
we have aimed to investigate, program, and build an autonomous pacemaker (APM) for running on a track.
"왜 최근 10년 사이, 육상 세계 신기록이 쏟아지고 있을까요?"
2016년 이후, 남녀 장거리 달리기 종목에서는 매년 새로운 세계 신기록이 경신되고 있습니다. 많은 이들이 나이키의 베이퍼플라이(Vaporfly) 같은 **'슈퍼 슈즈(Super Shoes)'**의 등장을 그 이유로 꼽지만, 전문가들은 또 하나의 결정적인 요인에 주목합니다. 바로 '페이스메이커(Pacemaker)' 전략의 진화입니다.

공기 저항을 줄여주고 선수의 심리적 부담을 덜어주는 페이스메이커는 기록 단축의 필수 요소입니다. 최근에는 트랙 안쪽 레일에 LED 불빛으로 속도를 알려주는 '웨이브라이트(Wavelight)' 기술까지 등장했죠. 하지만 이 첨단 기술에도 치명적인 단점이 있습니다. 불빛은 선수가 지치거나 뒤처져도 기다려주지 않는다는 점입니다.
"만약, 나를 알아보고 내 컨디션에 맞춰 완벽하게 리드해 주는 로봇이 있다면 어떨까요?"
노르웨이 과학기술대(NTNU) 연구팀은 이 상상을 현실로 만들기 위해, 트랙 위를 달리는 자율 주행 로봇 **'Rabbit'**을 개발했습니다. 스포츠 과학과 최신 AI 로봇 공학이 만난 이 흥미로운 프로젝트를 소개합니다.
1. 프로젝트 개요
논문명: Development of an Autonomous Rabbit for Running on a Track
저자: Camilla Kvamme, Enya Sofie J. Blindheim, Jonas Ovesen Bakke, Kristoffer Dean Dunham, Veronica Taklo Kenworthy (NTNU 사이버네틱스 및 로봇공학 석사 과정)
지도교수: Ole Morten Aamo
발행년월: 2024년 6월
이 연구의 목표는 단순히 트랙을 도는 것을 넘어, '적응형 크루즈 컨트롤(ACC)' 기술을 통해 주자가 뒤처지면 속도를 줄여 기다려주고, 다시 따라붙으면 목표 속도로 복귀하는 상호작용 가능한 로봇을 만드는 것이었습니다.
2. 하드웨어 플랫폼: 고속 주행을 위한 선택
연구팀은 실제 육상 선수의 속도를 감당하기 위해 일반적인 교육용 로봇 대신 고성능 RC카를 베이스로 선택했습니다.
베이스 차량: Arrma Infraction 6S (이전 답변의 Traxxas 모델에서 정정됨)
선정 이유: 이 모델은 온로드(On-road) 레이싱 트럭으로, 차체가 넓고 평평하여 컴퓨터와 센서를 장착하기 용이하며 고속 주행 시 안정성이 뛰어납니다.
추가 장비: 3D 프린팅으로 제작한 마운트, 배터리 트레이, GNSS 안테나 폴 등이 차량 위에 견고하게 설치되었습니다.
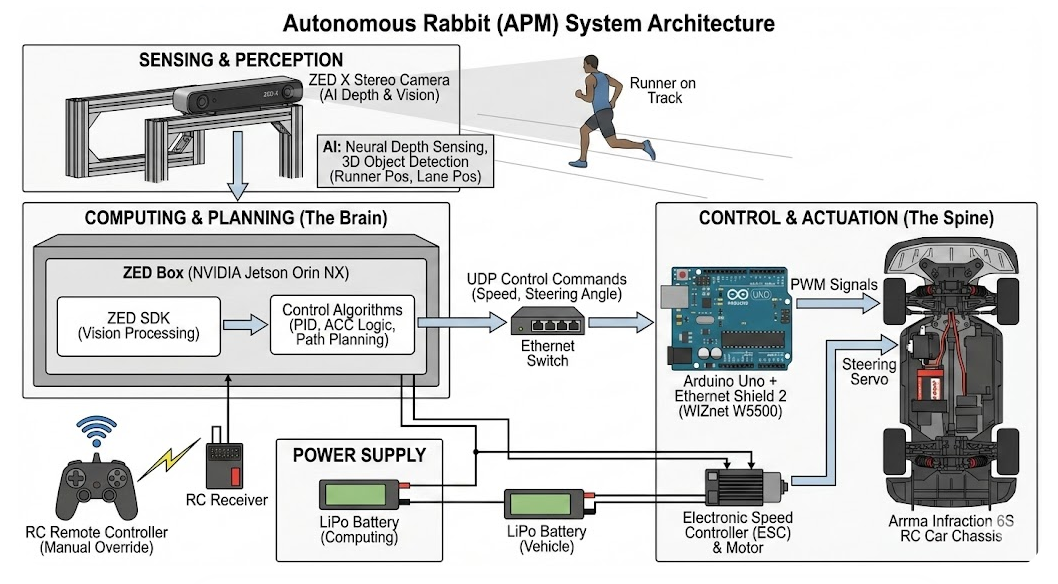
3. 로봇의 눈과 뇌: 엣지 AI와 컴퓨터 비전
Rabbit이 트랙의 레인을 지키며 사람을 인식할 수 있는 비결은 강력한 AI(인공지능) 기술에 있습니다.
3.1 두뇌: 엣지 AI 컴퓨터
로봇 상단에는 **ZED Box (NVIDIA Jetson Orin NX 내장)**가 탑재되었습니다. 이는 단순한 CPU가 아니라 AI 연산에 특화된 GPU를 포함하고 있어, 주행 중 실시간으로 신경망(Neural Network) 모델을 구동합니다.
3.2 시각: 스테레오 뉴럴 랩스 (Stereo Neural Labs)
로봇의 눈인 ZED X 스테레오 카메라는 두 개의 렌즈로 세상을 보며, 다음과 같은 AI 기술이 적용되었습니다.
뉴럴 뎁스 센싱 (Neural Depth Sensing): 육상 트랙은 바닥의 색깔과 무늬가 일정하여 일반 카메라로는 거리감을 상실하기 쉽습니다. 연구팀은 CNN(합성곱 신경망) 기반의 알고리즘을 적용해, 텍스처가 없는 트랙 표면에서도 빈 공간의 깊이(Depth) 정보를 AI가 추론하여 채워 넣도록 했습니다.
3D 객체 감지 (3D Object Detection): 단순히 화면 속에서 사람을 찾는 것(2D Bounding Box)을 넘어섭니다. AI는 인식된 주자의 위치를 뎁스 맵과 결합하여 **"주자가 로봇 후방 3.5m, 좌측 0.5m 지점에 위치함"**이라는 3차원 좌표(X, Y, Z)를 실시간으로 계산해 냅니다.
3.3 레인 감지 (Lane Detection)
AI가 분석한 바닥 평면(Ground Plane) 정보 위에서 색상 필터링과 허프 변환(Hough Transform) 알고리즘을 수행하여 트랙의 흰색 라인을 검출합니다. 이를 통해 로봇은 레인 중앙에서 벗어난 오차범위를 계산해 조향 장치를 제어합니다.
4. 로봇의 신경망: 아두이노와 이더넷 통신
고성능 컴퓨터(ZED Box)가 내린 "판단"을 실제 바퀴의 "움직임"으로 연결하는 중추적인 역할은 **아두이노(Arduino)**가 담당합니다. 연구팀은 신뢰성 높은 통신을 위해 특별한 구성을 채택했습니다.
4.1 아두이노 우노 + 이더넷 실드 2 (Ethernet Shield 2)
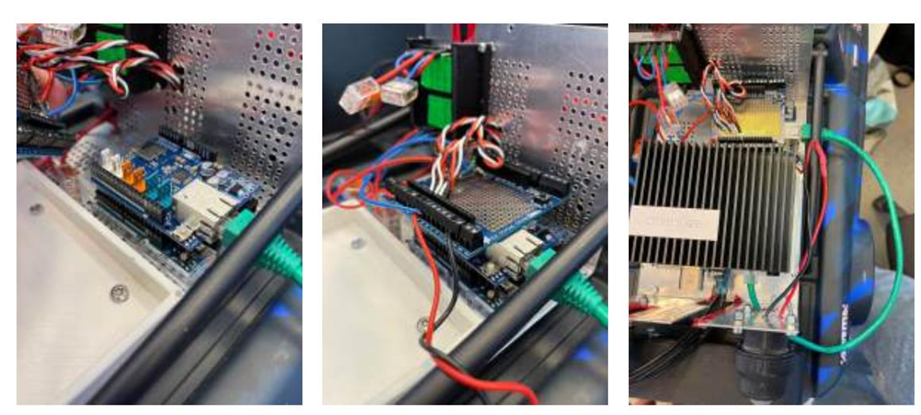
일반적인 USB 연결 대신 Arduino Ethernet Shield 2를 사용했습니다. 야외 트랙의 진동과 노이즈 환경에서도 끊김 없는 데이터 전송을 보장하기 위해서입니다.
통신 방식: ZED Box와 아두이노는 이더넷 케이블로 연결되어 고속 통신을 수행합니다.
신호 변환: 아두이노는 이더넷으로 수신한 디지털 명령(예: 속도 5m/s, 조향각 10도)을 RC카의 모터 컨트롤러(ESC)와 서보 모터가 이해할 수 있는 PWM(펄스 폭 변조) 신호로 변환하여 출력합니다.
4.2 안전을 위한 2중 장치 (Fail-Safe)
자율 주행에서 가장 중요한 것은 안전입니다. 아두이노 코드는 다음과 같은 안전 로직을 포함합니다.
Watchdog (감시견): 만약 컴퓨터와의 통신이 0.5초라도 끊기면, 아두이노는 즉시 모터 출력을 차단하여 로봇을 정지시킵니다.
수동 오버라이드: 조종자가 리모컨을 조작하는 순간, 아두이노는 자율 주행 모드를 즉시 해제하고 사람에게 제어권을 넘깁니다.
5. 결론 및 의의
이 프로젝트는 Arrma Infraction 6S라는 강력한 하드웨어 위에 NVIDIA의 엣지 AI 기술과 아두이노의 정밀 제어 기술을 성공적으로 결합했습니다.
비록 실험 과정에서 빛의 반사나 급격한 코너링 등 해결해야 할 과제들도 발견되었지만, 'Rabbit'은 로봇이 단순한 기계가 아니라 인간과 보조를 맞추는 훈련 파트너가 될 수 있음을 증명했습니다. 머지않아 우리는 스마트워치 대신 스마트 로봇과 함께 트랙을 달리는 미래를 맞이할지도 모릅니다.
1. [성능/지연시간] 자율 주행과 실시간 제어
Q1. "자율 주행 로봇처럼 0.1초의 반응 속도가 중요한 프로젝트에서, 소프트웨어 OS 기반의 네트워킹보다 WIZnet의 하드웨어 TCP/IP(TOE) 방식이 유리한 이유는 무엇인가요?"
질문 의도: 고성능 AI 컴퓨터(Jetson)와 모터 제어부(Arduino) 사이의 통신 지연(Latency)을 최소화하고 싶은 엔지니어의 질문.
WIZnet 포인트: WIZnet 칩은 네트워크 처리를 칩 내부 하드웨어에서 전담하므로, MCU(아두이노)가 모터 제어 인터럽트 처리에 온전히 집중할 수 있어 **'지터(Jitter) 없는 실시간성'**을 보장한다는 점을 어필할 수 있습니다.
2. [안정성/신뢰성] 야외 환경 및 노이즈
Q2. "진동이 심한 야외 주행 로봇(Rover) 환경에서 USB 시리얼 통신 대신 이더넷(SPI 기반 WIZnet 칩)을 사용했을 때 얻을 수 있는 통신 안정성 이점은 무엇인가요?"
질문 의도: USB 케이블이 빠지거나 노이즈로 인해 포트 인식이 끊기는 문제를 겪어본 개발자의 질문.
WIZnet 포인트: USB 프로토콜 대비 이더넷의 견고함, 그리고 WIZnet 칩이 제공하는 안정적인 PHY 성능을 강조할 수 있습니다. 특히 논문 사례처럼 Watchdog 기능과 결합했을 때 시스템의 안전성이 어떻게 높아지는지 설명하기 좋습니다.
3. [구현/프로토콜] UDP 통신 및 버퍼링
Q3. "PC(AI 서버)에서 MCU로 고속의 제어 데이터를 쏠 때, W5500 칩의 소켓 버퍼(Socket Buffer)를 활용하여 패킷 손실(Packet Loss) 없이 UDP 통신을 구현하는 최적의 방법은 무엇인가요?"
질문 의도: 대량의 센서 데이터나 제어 명령을 UDP로 주고받을 때 데이터가 깨지거나 밀리는 현상을 방지하려는 실무적인 질문.
WIZnet 포인트: WIZnet 칩의 독립적인 RX/TX 버퍼 메모리 구조와 이를 효율적으로 활용하는 라이브러리 설정 팁을 제공할 수 있습니다.
4. [시스템 부하] MCU 리소스 절약
Q4. "아두이노 우노(Uno)처럼 메모리와 성능이 제한적인 MCU를 사용할 때, WIZnet 칩을 사용하면 모터 제어(PWM)와 네트워킹을 동시에 수행해도 MCU 과부하가 걸리지 않나요?"
질문 의도: 저사양 MCU로 복잡한 기능을 구현하려는 메이커나 학생의 질문.
WIZnet 포인트: "TCP/IP Offload Engine(TOE)" 기술 덕분에 네트워크 패킷 처리를 위해 MCU가 연산을 낭비하지 않아, 저사양 MCU로도 고속의 이더넷 통신과 모터 제어가 동시에 가능하다는 '리소스 효율성'을 강조할 수 있습니다.
5. [확장성] 산업용 적용 가능성
Q5. "이 프로젝트에서는 아두이노 실드를 썼지만, 실제 양산형 산업 로봇을 만든다면 WIZnet의 어떤 칩셋이나 모듈(W6100, W5500 등)을 선정하는 것이 가장 적합할까요?"
질문 의도: 프로토타입을 넘어 실제 제품화를 고려하는 기업 고객의 질문.
WIZnet 포인트: 최신 칩셋(IPv6 지원 W6100 등)이나 소형화된 모듈 제품 라인업을 소개하며, 아두이노에서의 경험이 산업용 제품으로 어떻게 쉽게 이어질 수 있는지 연결할 수 있습니다.