
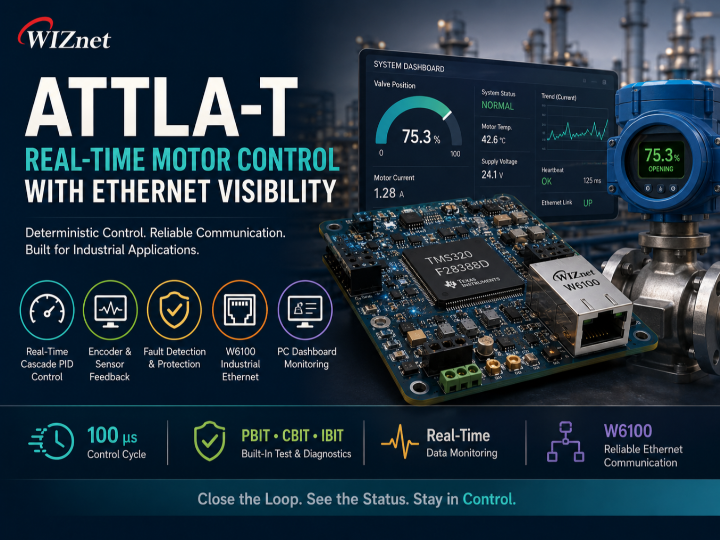
ATTLA_T
A high-performance actuator control platform combining TI C2000 and W6100 to deliver 100 μs real-time positioning, fault diagnostics, and Ethernet connectivity.
WIZnet - W6100
x 1
Why Systems Like This Matter
Imagine a system that must automatically rotate toward a target direction and lock precisely at the commanded position.
Examples include:
- Antenna positioning systems
- Automated tracking platforms
- Electro-mechanical actuators
- Precision pointing mechanisms
- High-reliability motion-control equipment
In these systems, simply spinning a motor is not enough.
The controller must know exactly where the mechanism is positioned, verify that movement occurred correctly, detect abnormal conditions, and maintain communication with operators or supervisory systems.
A positioning error of only a few degrees may be unacceptable.
This is the type of challenge ATTLA-T is designed to solve.
What the Project Does
ATTLA-T is a real-time actuator control platform built around a TI TMS320F28388D and a WIZnet W6100 Ethernet controller.
The platform combines:
- Position control
- Speed control
- Current control
- Absolute encoder feedback
- Brake control
- Current and voltage monitoring
- Fault detection
- Ethernet telemetry
- Built-In Test (BIT) diagnostics
Together, these subsystems create a controller capable of moving, monitoring, protecting, and reporting the state of a positioning mechanism.
How a Positioning and Locking System Works
A simplified operating sequence looks like this:
Target Position Command
↓
Position Controller
↓
Motor Movement
↓
Absolute Encoder Feedback
↓
Position Verification
↓
Brake Engagement
↓
Status Reporting via EthernetThe controller continuously verifies that commanded movement matches actual movement.
If excessive current, abnormal temperature, encoder faults, or communication issues occur, the system can detect and report them immediately.
Why W6100 Matters
The W6100 is not simply providing Ethernet access.
Its role is to isolate network communication from the real-time control system.
The TMS320F28388D focuses on:
- Control-loop execution
- Sensor acquisition
- Encoder processing
- Fault monitoring
while the W6100 manages:
- UDP communication
- Ethernet packet handling
- Heartbeat messaging
- Retry and recovery functions
- Network status monitoring
This separation helps preserve deterministic control timing even when network traffic is active.
For high-reliability motion systems, that architectural separation is often more important than raw network throughput.
The Technical Highlight: 100 μs Real-Time Control
Most embedded networking projects measure performance in packets or bandwidth.
ATTLA-T measures performance in control timing.
The controller executes a deterministic 100 μs loop that performs:
- ADC acquisition
- Encoder processing
- Driver monitoring
- Fault checks
- PID calculations
- Output updates
This timing requirement places the project far beyond the complexity of typical monitoring or dashboard-oriented IoT systems.
Cascade PID Control Architecture
The motion-control subsystem uses a three-stage cascade PID structure.
Position PID
↓
Speed PID
↓
Current PID
↓
PWM Output
↓
MotorThis architecture allows the controller to maintain accurate positioning while controlling speed transitions and current delivery.
It is a design commonly found in professional motion-control equipment, servo systems, and actuator controllers.
Reliability Features
The project incorporates several reliability-oriented design patterns:
- Power-On Built-In Test (PBIT)
- Continuous Built-In Test (CBIT)
- Initiated Built-In Test (IBIT)
- Over-current protection
- Over-voltage monitoring
- Temperature monitoring
- Motor stall detection
- Encoder fault detection
- Heartbeat communication
- ACK/NACK validation
- Automatic retry and recovery
These features demonstrate an emphasis on system integrity and operational safety.
Difficulty Level
Difficulty: Advanced / Expert
This is not a beginner-level Ethernet project.
Successfully developing a system like ATTLA-T requires expertise in:
- Real-time embedded systems
- TI C2000 development
- Motion-control engineering
- Cascade PID tuning
- Encoder integration
- Industrial communications
- Fault-management architecture
Compared with a typical STM32 or ESP32 networking project, the implementation complexity is significantly higher because control accuracy and timing consistency are critical requirements.
Similar Projects on WIZnet Maker
| Project | Focus Area | Difference from ATTLA-T |
|---|---|---|
| Industrial Modbus TCP Communication with STM32 and W5500 | Industrial Communication | Focuses on networking and protocol implementation rather than real-time motion control. |
| Unified IIoT Monitoring Platform | Industrial Monitoring | Aggregates industrial data but does not perform deterministic actuator control. |
| Smart Factory Monitoring System using IoT | Monitoring and Visualization | Emphasizes dashboards and telemetry, while ATTLA-T directly controls physical motion systems. |
FAQ
What is ATTLA-T designed for?
It is designed for high-reliability positioning and locking systems that require precise motion control, fault monitoring, and Ethernet connectivity.
Why use W6100 in this project?
The W6100 separates Ethernet communication from the real-time control firmware, helping maintain deterministic control timing.
What makes this different from a typical motor project?
The project combines 100 μs control loops, cascade PID control, encoder feedback, fault diagnostics, and Ethernet communication within a single architecture.
Is this an IoT monitoring platform?
No. Monitoring is only one part of the system. The primary function is real-time actuator control.
Is this a difficult project to build?
Yes. The combination of real-time control, motion-control algorithms, encoder feedback, fault handling, and Ethernet networking places it in the advanced embedded-systems category.
Source
Original Repository: ATTLA-T Industrial Real-Time Motor & Power Monitoring Platform with WIZnet W6100
Tags
#W6100 #ActuatorControl #MotionControl #PositionControl #CascadePID #TIC2000 #IndustrialEthernet #RealTimeControl #EmbeddedSystems #ServoControl