
Wood Pressing Robotic End-Effector
.
Overview

이 프로젝트는 산업용 로봇(KUKA)에 장착 가능한 커스텀 End-Effector를 설계 및 제작하여, 목재를 자동으로 성형(pressing & bending)하는 시스템을 구현한 사례입니다.
일반적으로 로봇 팔은 물체를 집거나 이동시키는 용도로 많이 사용되지만,
이 프로젝트에서는 로봇을 단순한 “이송 장치”가 아니라
👉 “재료를 직접 가공하는 제조 도구”로 확장했다는 점이 핵심입니다.
특히 얇은 목재 패널을 대상으로
- 특정 곡률(curvature)을 가진 형태로
- 반복적으로
- 일정한 품질로
성형할 수 있도록 설계되었습니다.
이러한 접근은 건축, 가구 디자인, 디지털 제작(Fabrication) 분야에서
👉 “복잡한 곡면 구조를 자동으로 생산”할 수 있는 가능성을 보여줍니다.
Project Motivation
목재를 곡선 형태로 만드는 작업은 전통적으로 다음과 같은 방식으로 진행됩니다:
- 수작업 bending
- 금형 사용
- 증기 처리(steam bending)
하지만 이런 방식은
- 반복성이 낮고
- 작업 시간이 길며
- 정밀도가 일정하지 않다는 한계가 있습니다
이 프로젝트는 이러한 문제를 해결하기 위해
👉 로봇 + 커스텀 툴 + 디지털 설계
를 결합하여 자동화된 제작 방식을 제안합니다.
Key Features
1. Custom Wood Pressing End-Effector
가장 핵심적인 부분은 바로 End-Effector 설계입니다.
이 장치는 단순히 물체를 잡는 그리퍼가 아니라
다음 기능을 수행합니다:
- 목재를 특정 위치에서 고정
- 일정한 압력으로 눌러 변형
- 곡면 형상을 따라 성형
즉,
👉 “잡는 도구” → ❌
👉 “가공 도구” → ✅
로 역할이 완전히 바뀝니다.
2. Industrial Robot Integration (KUKA)
KUKA 산업용 로봇을 활용하여
End-Effector를 3D 공간에서 정밀하게 제어합니다.
- 다축 제어 (multi-axis movement)
- 반복 위치 정확도 (high repeatability)
- 곡선 경로 이동
이를 통해
👉 사람이 하기 어려운 정밀한 곡면 작업을 자동화
할 수 있습니다.
3. Arduino-Based Actuation Control
End-Effector 내부의 동작은
Arduino를 통해 제어됩니다.
역할은 다음과 같습니다:
- 압력 제어
- 액추에이터 동작 제어
- 타이밍 및 시퀀스 관리
👉 로봇은 “위치”를 담당하고
👉 Arduino는 “동작”을 담당하는 구조
4. Ethernet Connectivity with W5500
이 시스템에는 WIZnet W5500 Ethernet 모듈이 함께 사용되어
Arduino에 네트워크 기능을 추가합니다.
W5500은 하드웨어 TCP/IP 스택을 내장하고 있어
👉 MCU의 부하 없이 안정적인 Ethernet 통신을 지원합니다.
이 모듈을 통해:
- 외부 시스템과의 통신 가능
- 원격 제어 및 트리거링
- 상태 모니터링 및 데이터 전송
👉 즉, 시스템을 Standalone → Network-enabled 시스템으로 확장
5. Digital Fabrication Workflow
이 프로젝트는 단순한 기계 제작이 아니라
디지털 제작 프로세스 전체를 포함합니다.
흐름은 다음과 같습니다:
- 곡선 형태 설계 (CAD / parametric design)
- 로봇 경로 생성
- End-Effector 동작 정의
- 자동 성형 실행
👉 설계 → 제작 → 결과물까지 완전 연결
6. Repeatable Manufacturing
이 시스템의 가장 큰 장점은
👉 “같은 결과를 반복적으로 생산 가능”
하다는 점입니다.
- 동일한 곡률
- 동일한 압력
- 동일한 결과
→ 산업 적용 가능성 ↑
Hardware Components
 주요 구성 요소
주요 구성 요소
- KUKA Industrial Robot
- Custom End-Effector
- Arduino UNO (controller)
- WIZnet W5500 Ethernet Module
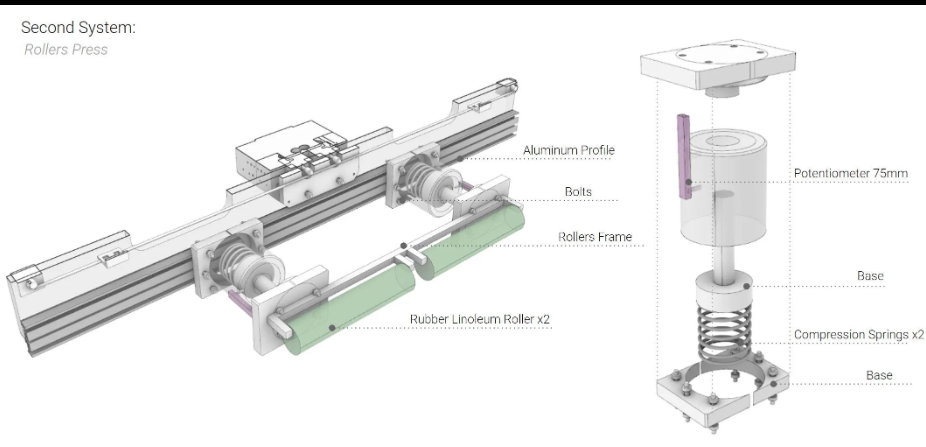
- Actuators (linear / pressing mechanism)
- Wood panels (thin, flexible)
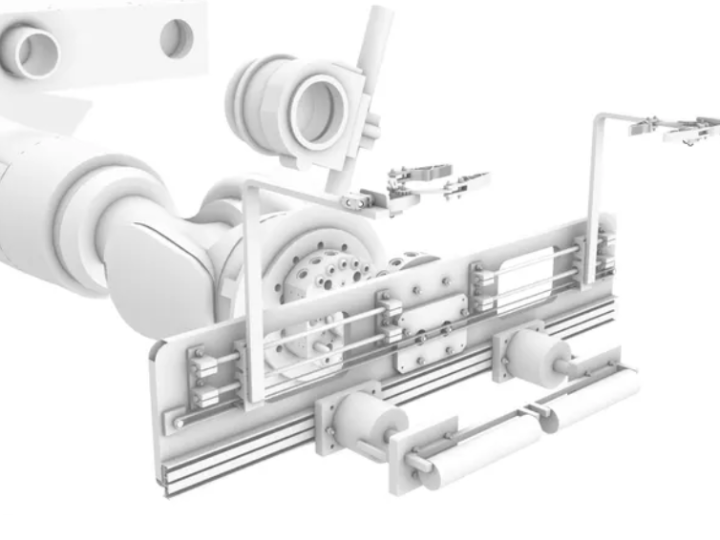
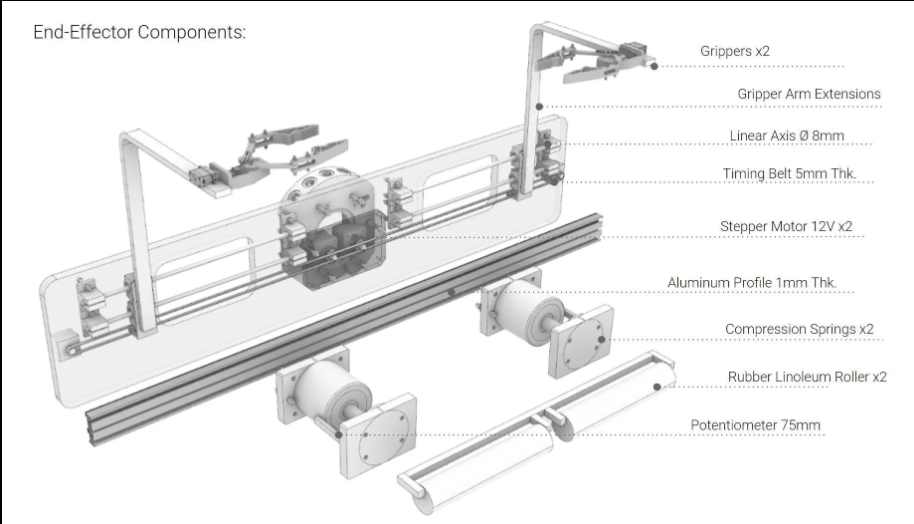
End-Effector 구조
End-Effector는 다음과 같은 구조로 구성됩니다:
- 프레임 (구조 지지)
- 압착판 (pressing plate)
- 가이드 곡면 (shape guide)
- 액추에이터
이 구조를 통해
👉 목재가 자연스럽게 곡면을 따라 변형됩니다
System Architecture
전체 시스템 흐름
- Design Phase
- 곡선 형태 설계
- 목재 변형 시뮬레이션
- Programming Phase
- 로봇 경로 생성
- Arduino 제어 코드 작성
- Execution Phase
- 로봇 이동
- End-Effector 압착 수행
- Output
- 성형된 목재 구조 생성
데이터 & 제어 흐름
- CAD → Robot Path
- Robot → 위치 이동
- Arduino → 압력 및 동작 제어
👉 이중 제어 구조 (Motion + Action 분리)
Fabrication Process (제작 과정)
Step 1. 설계
- 원하는 곡면 구조를 CAD로 설계
- 곡률 및 변형 범위 계산
Step 2. End-Effector 제작
- 프레임 제작 (3D printing / CNC)
- 압착 구조 설계
- 액추에이터 장착
Step 3. 제어 시스템 구성
- Arduino 코드 작성
- 액추에이터 테스트
- 압력 조절 실험
Step 4. 로봇 프로그래밍
- KUKA 로봇 경로 설정
- 작업 위치 정의
Step 5. 테스트 및 튜닝
- 목재 변형 테스트
- 압력 및 속도 조정
- 반복 실험
Step 6. 최종 결과
- 원하는 곡면 형태의 목재 생성
- 반복 생산 가능
Key Insight
이 프로젝트에서 가장 중요한 포인트는 다음입니다:
1. End-Effector = 로봇의 “기능”
로봇 자체는 동일하지만
👉 End-Effector가 바뀌면
👉 로봇의 역할이 완전히 달라집니다
2. Digital → Physical Transformation
디지털 설계 데이터를
👉 물리적 구조로 변환
하는 완전한 파이프라인 구현
3. Automation in Craft
전통적인 목공 작업을
👉 자동화 + 정밀화
한 사례
4. Network-Enabled Fabrication
Arduino UNO와 W5500의 결합을 통해
👉 단순한 로컬 자동화 시스템이 아니라
👉 네트워크 기반 제조 시스템으로 확장 가능
Applications
이 기술은 다양한 분야에 적용 가능합니다:
- 건축 구조 제작
- 곡면 패널 생산
- 가구 디자인
- 전시/아트 설치
- 맞춤형 제작 (custom fabrication)
Limitations & Improvements
현재 한계
- 목재 재질에 따른 변형 한계
- 균열(crack) 발생 가능성
- 압력 제어 정밀도 필요
개선 방향
- 센서 기반 압력 피드백
- 실시간 제어 시스템
- 다양한 재료 적용 (플라스틱, 복합재 등)
Summary
이 프로젝트는
- KUKA 로봇 + Arduino + 커스텀 End-Effector를 활용하여
- 목재를 자동으로 성형하는 시스템을 구현하고
- 디지털 설계부터 실제 제작까지 연결된
👉 완전한 디지털 제조 파이프라인을 보여줍니다
특히
👉 “로봇 = 단순 작업 장치”가 아니라
👉 “제조 도구”로 확장될 수 있다는 점
에서 매우 의미 있는 프로젝트입니다.
FAQ
Q1. 왜 End-Effector가 중요한가요?
→ 로봇의 실제 기능은 End-Effector에 의해 결정됩니다.
Q2. Arduino는 왜 사용되나요?
→ End-Effector의 세밀한 제어(압력, 타이밍)를 위해 필요합니다.
Q3. 목재가 깨지지 않나요?
→ 재질, 두께, 압력 조절에 따라 달라지며 테스트가 중요합니다.
Q4. 산업 적용이 가능한가요?
→ 반복 생산이 가능하기 때문에 충분히 가능성이 있습니다.
Q5. 확장 가능성은?
- 금속 성형
- 자동화 제작 시스템
- 스마트 팩토리
Q6. W5500은 어떤 역할을 하나요?
→ Arduino에 Ethernet 기능을 추가하여
원격 제어 및 모니터링을 가능하게 합니다.