
ESPRTK ESP32 F9P Radio Base Station RTK
ESPRTK ESP32 F9P Radio Base Station RTK


1.INTRODUCTION
정밀 농업(Precision Agriculture)은 GNSS 기반 RTK(Real-Time Kinematic) 기술을 활용하여 센티미터 수준의 위치 정확도를 확보합니다. 이러한 기술은 자동 농기계, 드론 관개 시스템, 스마트 농업 자동화 등에 널리 사용됩니다.
기존에는 NTRIP 서비스를 통해 인터넷 기반으로 RTK 보정 데이터를 받아야 했지만 다음과 같은 문제점이 있습니다.
인터넷 연결 의존성
서비스 비용 발생
복잡한 연결 구조
이 프로젝트에서는 ESP32 기반 ESPrtk 플랫폼과 u-blox ZED-F9P GNSS 모듈을 활용하여 인터넷 없이 동작하는 독립형 RTK Base Station을 구축합니다.
RTCM 보정 데이터를 생성하여 UHF Radio를 통해 농업 트랙터 및 드론 장비로 전송하는 구조입니다.
2.Required Components
| Component | Description |
|---|---|
| ESP32 DevKit C | RTK 데이터 처리 및 통신 제어 |
| u-blox ZED-F9P GNSS | RTK Base GNSS Receiver |
| W5500 Ethernet Module | 안정적인 네트워크 연결 |
| UHF Radio Transmitter | RTK 보정 데이터 송신 |
| GNSS RTK Antenna | 고정밀 GNSS 신호 수신 |
| OLED Display (SSD1306) | 시스템 상태 표시 |
| UART to RS232 Converter | 장비 인터페이스 변환 |
| Power Supply 5V | 시스템 전원 |
| Buzzer | 오류 알림 |
ESP32는 GNSS 데이터 처리와 네트워크 통신을 담당하는 핵심 컨트롤러입니다.
3. Hardware Setup
시스템 구조는 다음과 같습니다.
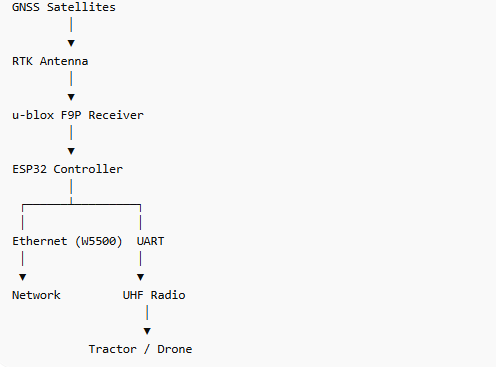
ESP32는 GNSS 수신기에서 생성된 RTCM 데이터를 처리하고 이를 외부 장치로 전달하는 데이터 브리지 역할을 수행합니다.

이 장비는 다음 기능을 합니다.
- 트랙터 위치 표시
- 자동 주행 경로 표시
- 농작업 라인 안내
3️⃣ 작업 라인 (빨간 선)
화면에 보이는 빨간 선은 농기계가 따라야 할 **작업 경로(가이드 라인)**입니다.
이 라인을 따라가면
씨앗 파종
비료 살포
농약 살포
를 겹치지 않고 정확하게 할 수 있습니다.
4. Testing Steps
RTK Base Station 테스트 절차
GNSS 안테나 설치
GNSS Receiver Base Mode 설정
ESP32 시스템 실행
RTCM 데이터 생성 확인
UHF Radio 송신 확인
수신 장치 연결
정상적으로 작동할 경우 수신 장치에서 RTK FIX 상태가 표시됩니다.
5. Troubleshooting
RTK FIX가 되지 않을 경우 다음을 확인해야 합니다.
가능한 원인
GNSS 설정 오류
RTCM 메시지 부족
무선 통신 오류
해결 방법
RTCM 메시지 구성 확인
GNSS 안테나 위치 점검
UART 통신 속도 확인
6. Use Cases & Market Potential
이 시스템은 다음 분야에서 활용 가능합니다.
Precision Agriculture
자동 농기계
농업용 드론
스마트 농업 시스템
Survey & Mapping
토지 측량
건설 현장 측정
Autonomous Systems
자율주행 로봇
위치 기반 자동화 시스템
저비용 RTK 시스템은 농업 자동화 시장에서 매우 높은 잠재력을 가지고 있습니다.
7. Conclusion
이 프로젝트는 ESP32와 u-blox F9P GNSS 모듈을 활용하여 저비용 RTK Base Station을 구축하는 방법을 설명합니다.
핵심 특징
인터넷 없이 동작하는 RTK 시스템
농업용 트랙터 및 드론 지원
UHF Radio 기반 RTCM 데이터 송신
ESP32 기반 확장 가능 구조
이와 같은 접근 방식은 정밀 농업 및 자율 시스템 분야에서 비용 효율적인 고정밀 위치 시스템을 구축하는 데 매우 효과적인 솔루션입니다.
Q1. GNSS란 무엇인가?
**GNSS(Global Navigation Satellite System)**는 위성 신호를 이용해 지구상의 위치를 계산하는 시스템이다.
GPS뿐만 아니라 여러 위성 시스템을 포함하는 개념이다.
대표적인 GNSS 시스템:
GPS (미국)
GLONASS (러시아)
Galileo (유럽)
BeiDou (중국)
QZSS (일본)
GNSS 수신기는 여러 위성 신호를 동시에 사용하여 위치를 계산한다.
Q2. RTK란 무엇인가?
**RTK(Real-Time Kinematic)**는 GNSS 위치 오차를 실시간으로 보정하여 센티미터 수준 위치 정확도를 제공하는 기술이다.
RTK는 두 장치를 사용한다.
Base Station : 기준 위치에서 오차 계산
Rover : 이동하며 위치 측정
Base station이 계산한 보정 데이터를 rover로 보내면 위치 정확도가 크게 향상된다.
일반 GPS 정확도: 약 3~10m
RTK 정확도: 약 1~2cm
Q3. RTCM이란 무엇인가?
**RTCM(Radio Technical Commission for Maritime Services)**은 RTK에서 사용하는 위치 보정 데이터 형식이다.
RTK 기준국(Base station)이 위성 오차를 계산해 RTCM 메시지를 생성하고 이를 rover로 전송한다.
대표 메시지 예:
RTCM 1005
RTCM 1077
RTCM 1087
이 데이터에는 위성 오차 정보와 기준국 위치 정보가 포함된다.
Q4. NTRIP이란 무엇인가?
**NTRIP(Networked Transport of RTCM via Internet Protocol)**은 RTCM 데이터를 인터넷을 통해 전달하는 프로토콜이다.
NTRIP 구조는 다음과 같다.
NTRIP Server : RTCM 데이터 생성
NTRIP Caster : 데이터 중계 서버
NTRIP Client : 보정 데이터 수신 장치
이 방식은 인터넷만 있으면 어디서든 RTK 보정 데이터를 받을 수 있다는 장점이 있다.
Q5. UHF Radio는 무엇인가?
**UHF Radio(Ultra High Frequency Radio)**는 RTCM 보정 데이터를 무선으로 전송하는 장치이다.
일반적으로 400~470 MHz 대역을 사용한다.
특징
인터넷 없이 사용 가능
약 5~20 km 통신 가능
농업 및 측량 RTK 시스템에서 많이 사용됨
Q6. u-blox ZED-F9P는 무엇인가?
u-blox ZED-F9P는 RTK 기능을 지원하는 고정밀 GNSS 수신기 모듈이다.
특징
센티미터 수준 위치 정확도
Multi-GNSS 지원
Dual-band GNSS
지원 위성 시스템
GPS
GLONASS
Galileo
BeiDou
주로 드론, 로봇, 자율주행, 정밀 농업 등에 사용된다.