
epos4-soem-control
This is a real-time EtherCAT master application to control EtherCAT slave devices(e.g. epos4, elmo)

Overview
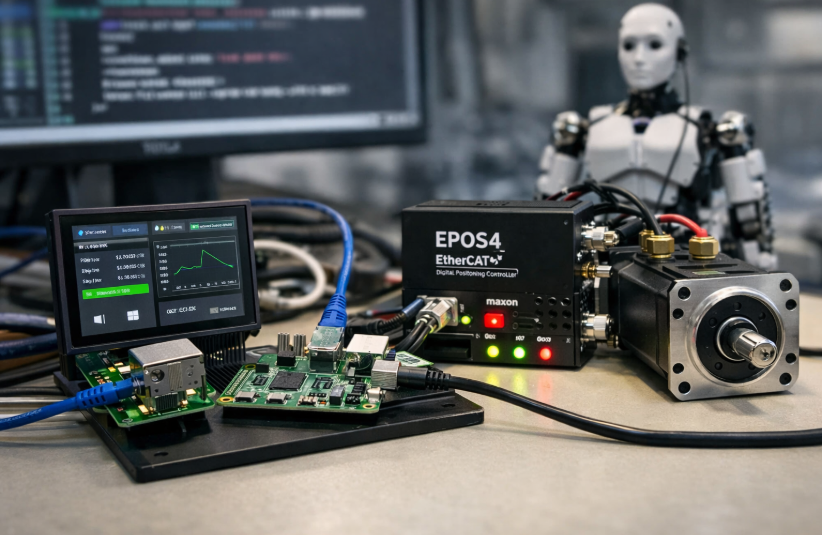
epos4-soem 프로젝트는 Raspberry Pi 4를 기반으로, PREEMPT_RT Linux와 SOEM(Simple Open EtherCAT Master)을 조합해 maxon EPOS4 EtherCAT 서보 드라이브를 제어하는 실시간 모터 제어 시스템이다. 단순한 테스트 코드 수준을 넘어, EtherCAT 마스터 초기화, PDO 매핑, Operational 상태 전환, 실시간 제어 루프, 상태 감시, 그리고 원격 명령 수신 기능까지 포함하는 구조를 갖는다.
이 프로젝트의 가장 큰 특징은 저비용 SBC 기반 실시간 EtherCAT 제어를 실제 동작 가능한 형태로 정리했다는 점이다. Raspberry Pi 4는 범용 개발 보드이지만, PREEMPT_RT 커널을 적용하면 일정 수준의 실시간성을 확보할 수 있고, SOEM을 통해 산업 현장에서 널리 사용하는 EtherCAT 슬레이브와 직접 연동할 수 있다. 여기에 EPOS4와 같은 상용 서보 드라이브를 연결하면, 정밀 위치 제어·속도 제어·상태 모니터링이 가능한 실전형 모션 제어 플랫폼을 만들 수 있다.
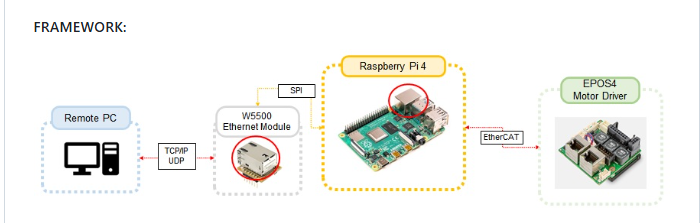
또한 이 프로젝트는 EtherCAT 통신과 별도로 원격 GUI 또는 TCP 명령 채널을 두는 구조를 채택하고 있다. 이때 WIZnet W5500 같은 SPI Ethernet 모듈을 추가하면 제어용 네트워크와 서비스용 네트워크를 분리할 수 있어, 시스템 안정성과 유지보수 편의성을 동시에 확보할 수 있다. 즉, 이 프로젝트는 단순히 “모터를 돌리는 예제”가 아니라, 실시간 제어 시스템 아키텍처를 이해하고 확장하는 데 적합한 레퍼런스라고 볼 수 있다.
Features
이 프로젝트는 EtherCAT 기반 모션 제어 시스템을 구성하는 데 필요한 핵심 기능을 비교적 잘 갖추고 있다.
1. Real-Time EtherCAT Master
SOEM을 사용해 Raspberry Pi 4를 EtherCAT 마스터로 동작시킨다. 일반적인 사용자 공간 애플리케이션과 달리, EtherCAT 슬레이브와의 주기적 데이터 교환을 전제로 설계되어 있어 실시간 제어에 적합하다.
2. EPOS4 Servo Drive Control
maxon EPOS4 EtherCAT 드라이브를 대상으로 PDO 매핑과 상태 전환을 수행하며, Operational 상태에 진입한 뒤 실제 제어 루프를 시작한다. 이를 통해 위치 기반 제어, 테스트 모션, 원격 명령 기반 제어 같은 확장이 가능하다.
3. PREEMPT_RT Linux Support
프로젝트는 PREEMPT_RT가 적용된 Raspberry Pi 4 환경을 기준으로 설계되었다. 이는 제어 주기의 안정성과 지터 감소에 직접적으로 기여하며, 실시간성이 중요한 모터 제어 애플리케이션에서 매우 중요한 요소다.
4. Multi-Threaded Architecture
시스템은 하나의 루프만으로 동작하지 않는다. EtherCAT 상태를 감시하는 스레드, 실시간 제어 루프 스레드, TCP 명령을 처리하는 스레드가 분리되어 있어, 제어 성능과 관리 기능을 동시에 확보한다.
5. Remote Command and GUI Integration
원격 GUI 또는 외부 프로그램에서 TCP 명령을 보내 제어할 수 있는 구조를 포함한다. 이는 실험실 장비, 원격 유지보수 장비, 데모 시스템, 교육용 플랫폼에 특히 유용하다.
6. Expandable Network Architecture with WIZnet
WIZnet W5500 SPI Ethernet 모듈을 추가하면 EtherCAT 전용 포트와 별개로 서비스 네트워크를 구성할 수 있다. 이를 통해 원격 UI, 데이터 로깅, 유지보수 접속 경로를 제어망과 분리할 수 있다.
System Architecture
이 프로젝트의 시스템 구조는 크게 실시간 제어 계층, 필드버스 계층, 원격 서비스 계층으로 나눌 수 있다.
1. Real-Time Control Layer
Raspberry Pi 4가 시스템의 중앙 제어기 역할을 한다. PREEMPT_RT Linux 위에서 애플리케이션이 실행되며, 내부적으로 다음 기능이 분리되어 동작한다.
- EtherCAT 초기화 및 상태 전환
- PDO 기반 입출력 데이터 매핑
- 주기적 실시간 모터 제어 루프
- 상태 감시 및 오류 복구 체크
- TCP 기반 원격 명령 처리
즉, Raspberry Pi는 단순 호스트가 아니라 EtherCAT Master + Motion Controller + Remote Gateway 역할을 동시에 수행한다.
2. EtherCAT Fieldbus Layer
Raspberry Pi의 주 네트워크 인터페이스는 EtherCAT 마스터 포트로 사용된다. 이 포트를 통해 EPOS4 드라이브와 실시간 프레임을 주고받는다. EPOS4는 여기서 슬레이브 역할을 하며, 명령값과 상태값을 PDO 형태로 교환한다.
구조는 다음과 같다.
Raspberry Pi 4 → EtherCAT Master Interface → EPOS4 Servo Drive → Motor / Encoder
이 계층은 지터와 주기 안정성이 핵심이므로, 일반적인 사용자 네트워크 트래픽과 분리해 운용하는 것이 바람직하다.
3. Service Network Layer
원격 GUI 또는 외부 PC와 통신하기 위해 추가 네트워크 경로가 필요하다. 이때 Wi-Fi를 사용할 수도 있지만, 보다 안정적인 유선 연결을 위해 WIZnet W5500 SPI Ethernet 모듈을 추가할 수 있다.
구조는 다음과 같다.
Remote PC / GUI → W5500 or Secondary Network → Raspberry Pi TCP Command Interface
이 분리 구조의 장점은 명확하다.
- EtherCAT 제어망 보호
- 원격 접속 안정성 향상
- 유지보수 및 모니터링 기능 추가
- 데이터 로깅 및 UI 연결 확장 용이
4. Functional Data Flow
전체 데이터 흐름은 아래와 같이 이해할 수 있다.
- 원격 GUI 또는 클라이언트가 TCP 명령 전송
- Raspberry Pi가 명령 수신
- 제어 스레드가 목표값 생성
- SOEM이 PDO를 통해 EPOS4로 명령 전달
- EPOS4가 모터를 구동하고 엔코더 상태를 반환
- Raspberry Pi가 상태를 수집해 다시 GUI로 전달
이 구조는 산업 장비, 테스트 벤치, 교육용 데모 시스템, 연구용 모션 플랫폼에 매우 적합하다.
Market & Application Value
이 프로젝트는 모터 제어를 넘어, 산업 자동화와 연구용 모션 제어 사이의 실용적 접점을 보여준다. 특히 Raspberry Pi 4, SOEM, EPOS4, 그리고 WIZnet 기반 보조 네트워크 구성을 결합함으로써 저비용이면서도 확장 가능한 제어 플랫폼을 구현할 수 있다.
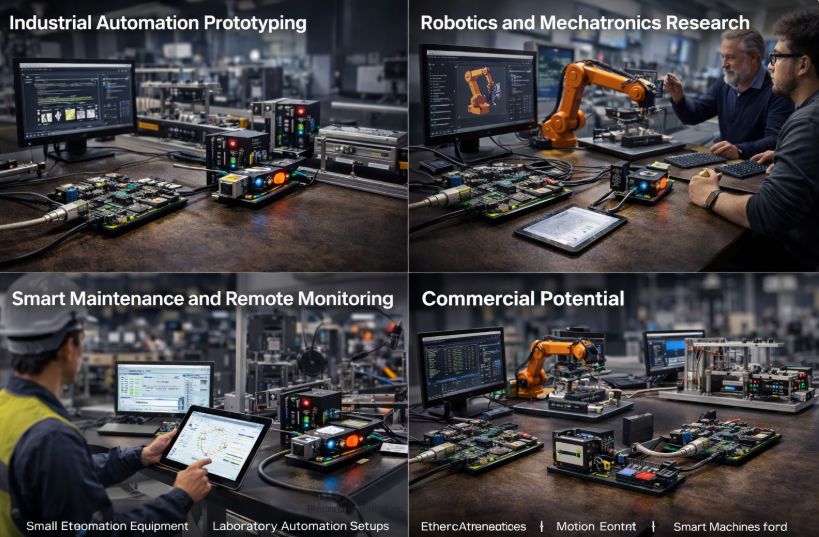
1.산업 자동화
소형 자동화 장비, 이송 장치, 검사 장비, 실험용 생산 셀에서는 EtherCAT 기반 제어가 자주 요구된다. 이 프로젝트는 고가의 산업용 IPC 없이도 EtherCAT 마스터와 서보 드라이브 제어를 시험할 수 있어, 초기 프로토타입 개발에 매우 적합하다.
2. 로봇 공학 연구
로봇 관절 제어, 소형 액추에이터 제어, 정밀 위치 제어 실험에 활용할 수 있다. 특히 연구실에서는 빠른 개발, 낮은 비용, 코드 수정 용이성이 중요하므로, 이 프로젝트 구조는 연구용 플랫폼으로 높은 가치를 가진다.
3. 교육 및 훈련
EtherCAT, PDO 매핑, 실시간 Linux, 멀티스레드 제어 구조를 한 프로젝트에서 함께 학습할 수 있다는 점에서 교육용 가치가 높다. 학생이나 엔지니어 교육 과정에서 “산업용 필드버스와 실제 제어 소프트웨어가 어떻게 연결되는가”를 보여주기에 좋다.
4. 스마트 유지보수 원격 모니터링
WIZnet W5500을 활용해 제어망과 서비스망을 분리하면, 현장 장비의 유지보수성과 원격 진단성이 높아진다. 이는 스마트 팩토리, 예지보전, 원격 장비 지원 분야에서 매우 실용적이다.
5. 상업적 잠재력
이 구조는 다음과 같은 시장에 적용 가능성이 있다.
- 소형 산업 자동화 장비
- 실험실 자동화 장치
- 교육용 EtherCAT 트레이너
- 연구용 모션 제어 플랫폼
- 원격 유지보수 가능한 스마트 머신
특히 “저비용 + 오픈소스 + 산업용 프로토콜 + 원격 관리” 조합은 스타트업, 연구실, 장비 개발 초기 단계에서 경쟁력이 높다.