
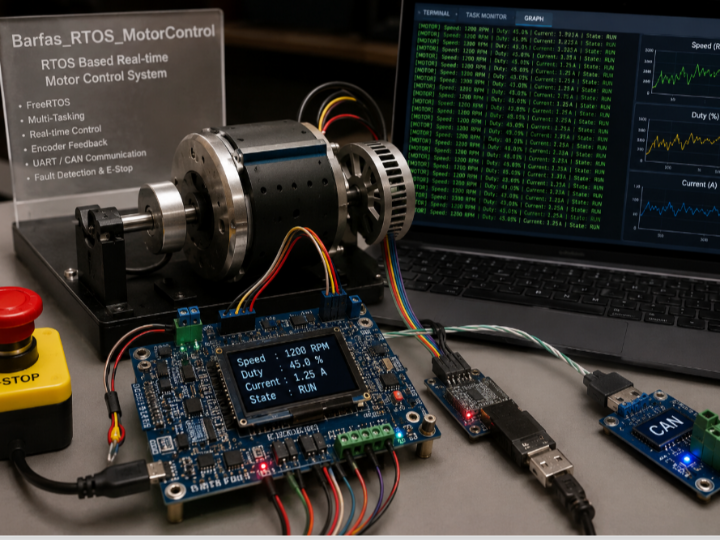
Barfas_RTOS_MotorControl
STM32 tabanlı, FreeRTOS destekli gömülü sistem projesi. W5500 Ethernet modülü üzerinden TCP istemci (Client) mimarisiyle haberleşerek L298N motor sürücüsünü ve
Barfas_RTOS_MotorControl
STM32와 FreeRTOS 기반의 실시간 모터 제어 시스템입니다.
WIZnet W5500 Ethernet 모듈을 활용하여 네트워크 통신 기능까지 통합한 산업형 임베디드 프로젝트입니다.
프로젝트 소개
모터 제어 시스템은 단순 PWM 출력만으로 동작하지 않습니다.
실제 산업 환경에서는 다음 기능들이 동시에 처리되어야 합니다.
- 실시간 속도 제어
- 센서 데이터 처리
- Ethernet 통신
- 인터럽트 기반 이벤트 처리
- 상태 모니터링
- Fault Detection
- 원격 제어
기존의 super-loop 기반 firmware에서는 polling 증가, ISR 과부하, timing jitter, task dependency 문제 등으로 인해 시스템 복잡도가 빠르게 증가합니다.
이 프로젝트는 이러한 문제를 해결하기 위해 FreeRTOS 기반 멀티태스킹 구조를 적용한 실시간 모터 제어 아키텍처를 구현합니다.
또한 WIZnet W5500 Ethernet 칩을 통해 네트워크 기능까지 통합하여, 단순 standalone controller를 넘어 산업용 Embedded Controller 구조를 학습할 수 있도록 설계되었습니다.
프로젝트 목표
본 프로젝트의 핵심 목표는 다음과 같습니다.
- FreeRTOS 기반 멀티태스킹 구조 설계
- 실시간 모터 제어 구현
- Ethernet 기반 네트워크 통신 연동
- ISR 기반 이벤트 처리 구조 학습
- Embedded firmware architecture 이해
- 산업용 제어 시스템 구조 학습
단순 loop 기반 firmware가 아닌,
실제 산업용 embedded motor-control firmware 구조 구현을 목표로 합니다.
W5500 Ethernet 활용
W5500 Ethernet 모듈을 통해 다음 기능을 확장할 수 있습니다.
- 모터 상태 원격 모니터링
- 실시간 측정값 전송
- PC 기반 제어 인터페이스 연동
- 산업용 IoT 시스템 연결
이를 통해 standalone motor controller가 아닌,
네트워크 기반 Industrial Embedded Controller 구조를 구현할 수 있습니다.
주요 특징
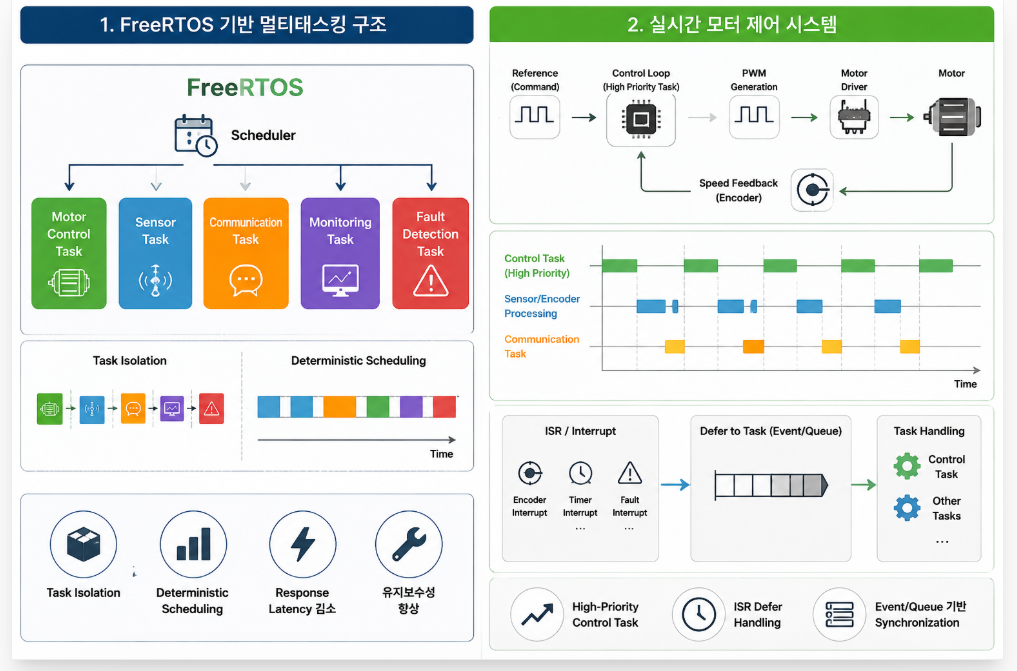
1. FreeRTOS 기반 멀티태스킹 구조
FreeRTOS는 task 기반 구조를 제공하여 여러 기능을 동시에 안정적으로 처리할 수 있도록 합니다.
본 프로젝트는 일반적으로 다음과 같은 구조를 기반으로 동작합니다.
- Motor Control Task
- Sensor Task
- Communication Task
- Monitoring Task
- Fault Detection Task
기존 polling 기반 구조와 달리:
- 기능별 Task 분리 구조
- 안정적이고 예측 가능한 스케줄링
- 빠른 이벤트 응답 성능
- 유지보수 및 확장성 향상
등의 장점을 얻을 수 있습니다.
2. 실시간 모터 제어 시스템
모터 제어는 timing precision이 매우 중요한 분야입니다.
특히:
3. Interrupt 기반 이벤트 처리
임베디드 제어 시스템에서는 다음과 같은 이벤트가 반복적으로 발생합니다.
- encoder pulse
- timer interrupt
- UART RX/TX
- Ethernet event
- fault interrupt
모든 처리를 ISR 내부에서 수행할 경우:
- latency 증가
- scheduling 불안정
- interrupt nesting 문제
등이 발생할 수 있습니다.
FreeRTOS에서는 deferred interrupt handling 구조를 통해 ISR 내부 작업을 최소화하고 task 기반 후처리를 수행할 수 있습니다.
이를 통해:
- ISR execution time 감소
- system responsiveness 향상
- 안정적인 scheduling
구현이 가능합니다.
시스템 구조
프로젝트는 일반적으로 다음과 같은 흐름으로 구성됩니다.
Sensor Input
↓
Interrupt / ISR
↓
RTOS Queue / Event
↓
Motor Control Task
↓
PWM Output
↓
Motor Driver
↓
Ethernet Monitoring
↓
Remote PC / Server이 구조는:
- CPU 효율 향상
- ISR 최소화
- task 분리
- 실시간성 확보
- 원격 모니터링 지원
에 유리합니다.
활용 가능 분야
본 프로젝트 구조는 다음 분야로 확장 가능합니다.
- Industrial Automation
- Smart Factory
- AGV / AMR
- Robot Drive System
- BLDC Controller
- IoT Edge Controller
- Ethernet 기반 산업 장비
특히 WIZnet Ethernet 칩을 활용하면
산업용 네트워크 환경과 연동되는 embedded controller 설계가 가능합니다.