
Home Cleaning Rover System
A small rover which would help in cleaning of the house by
attaching a small brush under the rover.

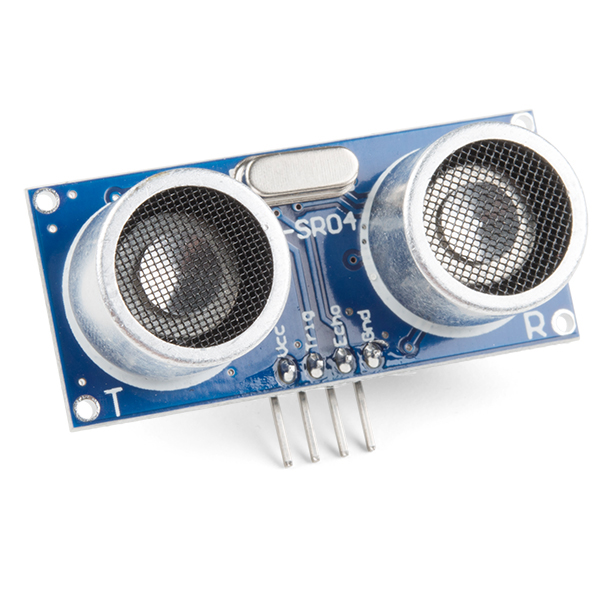
sparkfun - Ultrasonic Sensor - HC-SR04
x 2
For obstacle detection
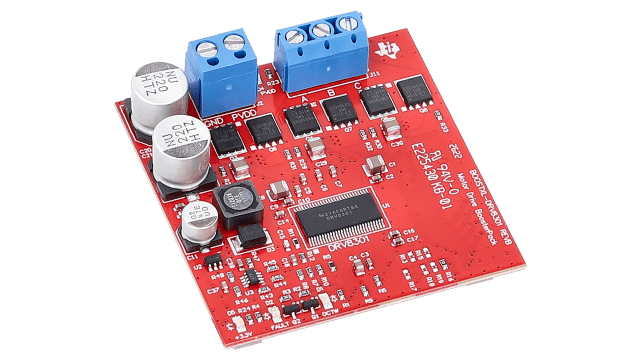
texasinstruments - BOOSTXL-DRV8301 DRV8301 3-phase brushless DC Motor Drive BoosterPack
x 1
plus 2 DC Motors

Arduino - Arduino IDE
x 1
We propose to make a small rover which would help in cleaning of the house by attaching a small brush under the rover. This rover can be controlled by the users phone with the help of wifi a module. The rover can be controlled by the user on the mobile phone using the wifi module.The rover can go in all directions. If the ultrasonic sensor detects any object in front of it, the rover will stop. Similarly for the sides of the vehicle the IR sensor will indicate if there is any object in the way and it will correct its track accordingly.
This project is a multi purpose project which can be used for various scenarios. Different accessories can be attached according to the users needs. For example this same rover can be used for home cleaning , gardening purposes, large scale farming purposes, etc.
To help the cleaning purpose the camera will detect a place which is very dirty and clean that place multiple times till that place is clean.
How it works :-
Once the rover and the mobile are connected to the same wifi network, the webpage can be loaded using the ip address of the microcontroller. The page is hosted in port 80 on the microcontroller. Once the page is loaded, you can see two buttons namely START and STOP. To start the rover press the start button, the rover will start. It will move forward and once it detects something it will slow down and if the object doesn't move then it will stop and start moving backward. It will keep moving back until there is sufficient space at front. But if it detects something at the back it will stop and wait for objects at both end to clear out. If the front object clears out first, it will start moving ahead. If the back object clears out first it will move back until there is sufficient space at front.
-
Home Cleaning Rover System

