
Tesla Swarm Controller with WIZnet W5500
Raspberry Pi Pico 2–based Tesla coil swarm controller. WIZnet W5500/W6100 enable UDP network slaves; MicroPython→C migration ensures performance.
Project Overview
Inspired by drone swarms, this project aims to synchronize and control multiple Tesla coils through a master/slave architecture. The baseline hardware combines Pico 2, I2CEncoder, SPI OLED, SD, and SPI Ethernet (WIZnet). WIZnet was the natural choice; since the W6100 lacked MicroPython support, the prototype used W5500 + MicroPython, while the high-performance slave target was W6100 + C.
Key Features
WIZnet Ethernet: Provides low-latency and reliable UDP frame reception. Implemented in MicroPython (W5500) and C (W6100).
Flexible UI: Built on the MicroPython uMenu library (class-based, modular).
Scalable Slave System: Configuration stored in flash with group/offset addressing for individual or grouped slave control.
Hardware Setup
Pico 2 ↔ WIZnet(W5x00): SPI (SCK/MOSI/MISO), CS, RST. Follow board-specific power/ground guidelines.
Input/UI: I2CEncoders share interrupt lines; use mutex + asyncio to avoid race conditions.
Output: Hardware PWM is preferred. For noise, apply low-pass filter + resistor.
Software Implementation
Core Functionality (MicroPython, W5500 Example)
MicroPython → C Migration
When moving to W6100, implement UDP listener + PWM updates in C with Pico SDK and WIZnet libraries for higher performance and flash persistence.
Network Architecture
Master: Generates control frames (interrupter, MIDI, etc.) and transmits via UDP.
Slaves: Receive UDP packets and update PWM outputs. Addressing supports both individual and group commands.
Performance Results
MIDI Handling: MicroPython on a single core struggled; dual-core execution required.
Output Quality: Hardware PWM proved most stable; spikes/pops reduced with low-pass filters and resistors.
Language Comparison: CircuitPython too slow, MicroPython (W5500) worked for prototypes, C (W6100) offered best scalability.
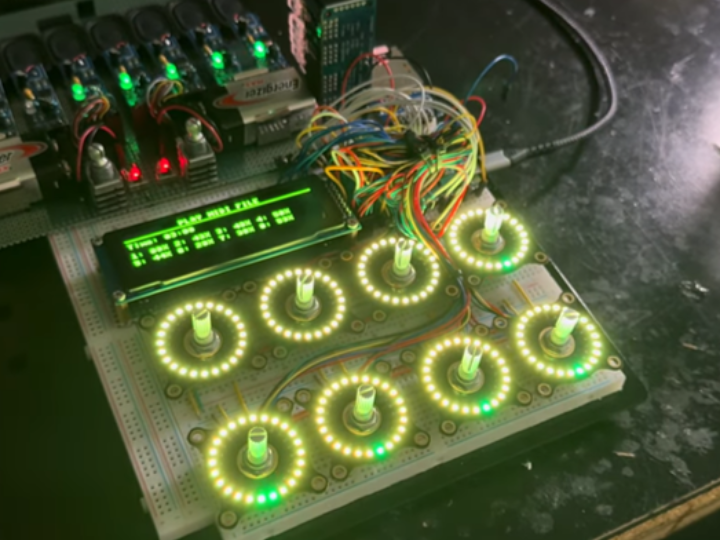
Demo: 8-channel controller successfully played “Footloose”, with RGB ring LEDs functioning as VU meters.
Lessons Learned
Multi-I2C devices require mutexes and lightweight interrupt callbacks (heavy work deferred to asyncio tasks).
Wired UDP + WIZnet delivered the required low latency and reliability for swarm control.
Future Improvements
Full transition to W6100-based slaves; possible MicroPython integration if support matures.
Standardized multicast/group control protocol, explore time synchronization (NTP/PTP), and add OTA firmware updates/logging.
Improve EMI/ESD hardening near high-voltage Tesla coils with shielding, grounding, and filtering.
Challenges & Solutions
I2CEncoder concurrency issues → solved with mutex + asynchronous design.
Performance/language trade-offs → W5500+MicroPython succeeded initially; C on W6100 required for higher performance.
Output spikes → mitigated with filter/resistors; further refinement planned in future updates.
DOCUMENTS
Code
Name: uMenu (MicroPython menu library)
Link: https://github.com/plugowski/umenu
Comment: Class-based UI library used for the project.
Others
Name: Project Article – Part 2
Link: https://teslauniverse.com/tesla-universe-news/tesla-swarm-controller-part-2-getting-net-work
Comment: Detailed description of networking, slaves, and language choices.
Others
Name: Tesla Swarm Controller – Gallery
Link: https://teslauniverse.com/tesla-news/galleries/tesla-swarm-controller
Comment: Photos of development and testing.