
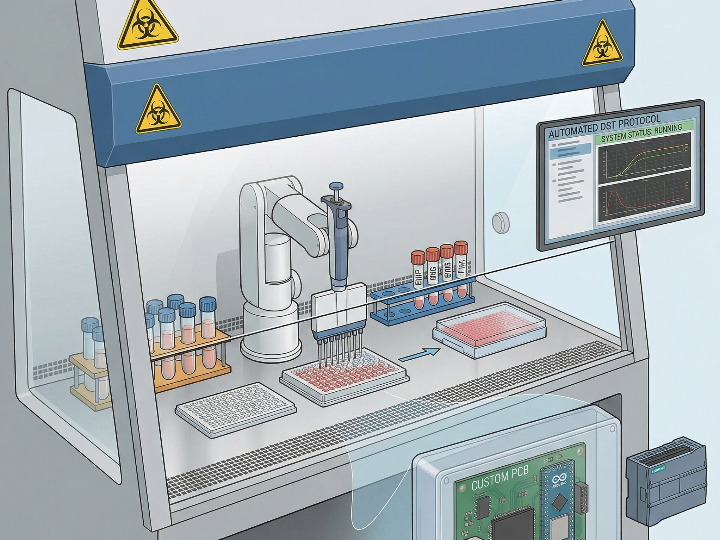
Robotic System for Sample Manipulation and Pipetting in Tuberculosis Testing
Custom PCBs integrate W5500/ENC28J60 to enable industrial Ethernet communication between the PLC and slave controllers for robotic pipetting.
01 — 이 프로젝트는 무엇인가?
결핵(TB)은 전 세계적으로 여전히 심각한 공중보건 문제입니다. 2022년 한 해에만 1,060만 명이 결핵 진단을 받았고, 그 중 41만 명이 다제내성 결핵(TB-MDR)으로 발전했습니다. 페루는 아메리카 대륙에서 TB-MDR 발생률이 가장 높은 나라 중 하나입니다.
이 결핵균이 어떤 항생제에 반응하는지 알아내려면 약물 감수성 실험을 해야 합니다. 살아 있는 결핵균 샘플을 배지에 직접 심는 작업입니다. 공기 중으로 퍼지는 균의 특성상 이 작업을 하는 실험실 기술자는 항상 감염 위험에 노출됩니다.
이 논문은 그 위험한 반복 작업을 로봇 팔 + 자동 피페팅 스테이션으로 대체하는 메카트로닉스 시스템을 설계합니다. 페루 가톨릭대학교(PUCP) 메카트로닉스 공학과 졸업논문으로, 2026년 2월 제출되었습니다.
02 — 시스템은 어떻게 동작하나?
[사용자]
튜브 샘플 + 페트리 접시 투입
↓ 입력 서랍
[바이오안전 캐비닛 Class II 내부]
├─ 선형 레일 위의 Dobot MG400 로봇 팔
│ ↓ 샘플 튜브 이동
├─ 샘플 개봉 스테이션
│ ↓ 튜브 뚜껑 열기
├─ D-ONE Assist Plus 자동 피페팅 스테이션
│ ↓ 배지로 샘플 이식
└─ 출력 스테이션
완성된 페트리 접시 배출
[PLC S7-1200 + HMI KTP400]
전체 공정 제어 및 모니터링작업 흐름은 3단계입니다.
1단계 — 샘플 이동: 로봇 팔이 입력 서랍에서 결핵균 희석액이 담긴 샘플 튜브를 집어 개봉 스테이션으로 이동합니다. 전용 그리퍼가 튜브 뚜껑을 3회전 이상(약 1080°) 돌려 엽니다.
2단계 — 피페팅: 자동 피페팅 스테이션이 샘플을 흡입해 항생제가 준비된 페트리 접시에 정확히 이식합니다. 10분 균질화 대기 후 뚜껑을 닫습니다.
3단계 — 출력: 완성된 페트리 접시가 출력 스테이션에 배치됩니다. 사용한 튜브는 폐기 처리됩니다.
03 — 왜 W5500인가?
🔷 PLC ↔ 마이크로컨트롤러 간 이더넷 통신이 필요하다
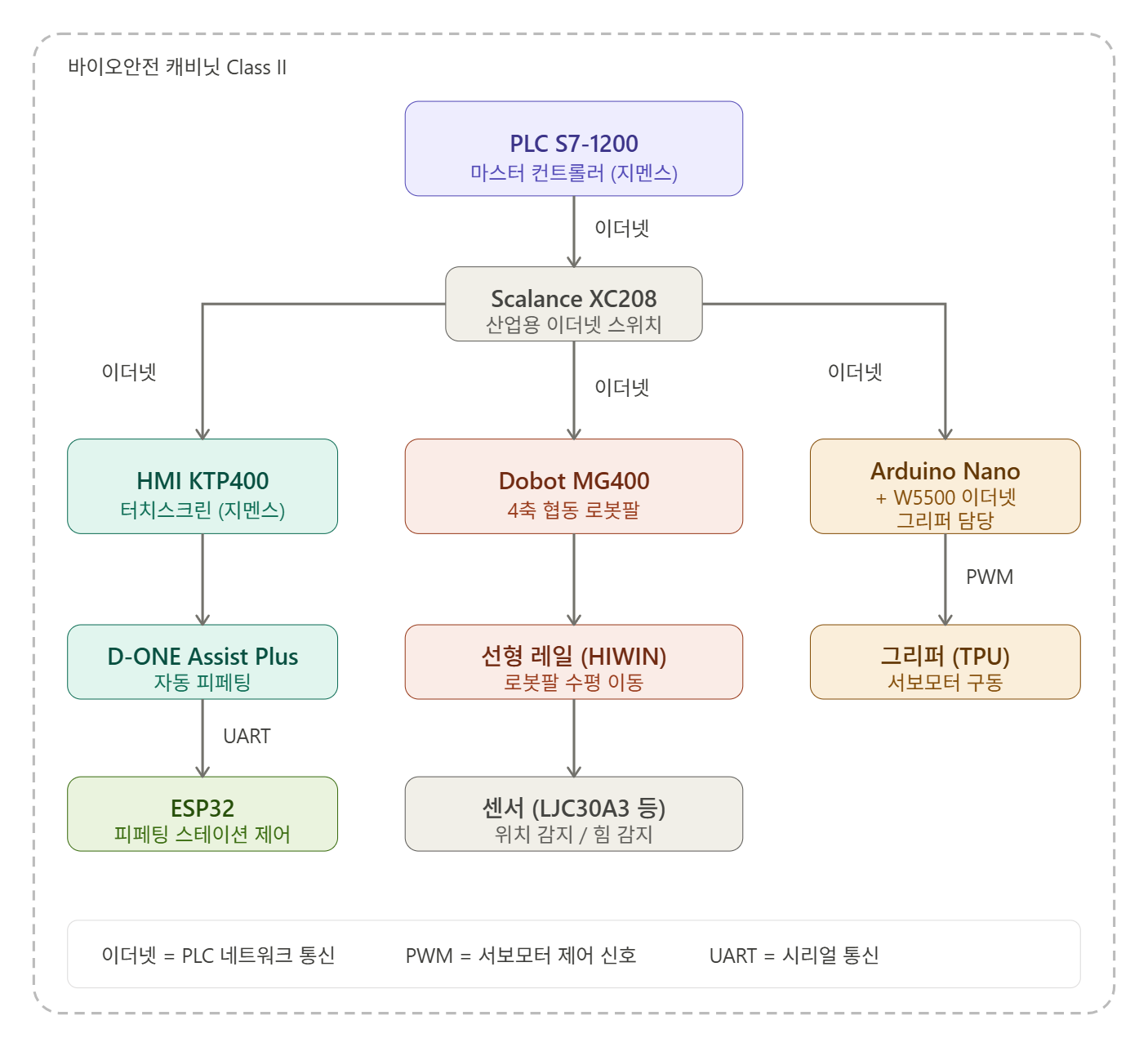
이 시스템은 계층적 제어 구조를 가집니다. Siemens S7-1200 PLC가 마스터 컨트롤러로 전체 공정을 제어하고, Arduino Nano와 ESP32가 각 서브시스템(그리퍼, 피페팅 스테이션)을 담당하는 슬레이브로 동작합니다.
이 마스터-슬레이브 구조에서 통신의 안정성이 핵심입니다. 바이오안전 캐비닛 내부의 금속 구조물과 전기 모터에서 발생하는 EMI(전자기 간섭) 환경에서 WiFi 무선 통신은 불안정할 수 있습니다.
W5500 기반 이더넷 모듈(W550 Lite)이 Arduino Nano의 유선 이더넷 통신을 담당합니다. PLC의 이더넷 포트, Siemens Scalance XC208 산업용 스위치, W5500 모듈이 하나의 산업용 이더넷 네트워크로 연결되어 안정적인 제어 통신을 구성합니다.
| WiFi | W5500 유선 | |
|---|---|---|
| EMI 환경 | 간섭 영향 받음 | 영향 없음 |
| PLC 연동 | 비표준 | Ethernet 표준 |
| 실시간 제어 신뢰성 | 낮음 | 높음 |
04 — 핵심 구성 요소
🦾 Dobot MG400 — 4축 협동 로봇 팔
컴팩트한 데스크탑 협동 로봇입니다. 최대 도달 거리 440mm, 최대 적재 하중 750g으로 샘플 튜브와 페트리 접시를 정밀하게 핸들링합니다. PLC와 이더넷으로 직접 통신하며 PLC가 TCP 좌표 명령을 전송하고 로봇이 위치 상태를 반환합니다.
🖇️ 전용 그리퍼 — TPU 소재, 서보모터 구동
논문에서 직접 설계한 2핑거 그리퍼입니다. 90mm 페트리 접시와 17mm 샘플 튜브를 모두 잡을 수 있도록 설계되었습니다. 소재는 열가소성 폴리우레탄(TPU) — 충분한 마찰력과 유연성으로 유리 용기를 안전하게 잡습니다. TowerPro MG946R 서보모터가 그리퍼 개폐와 튜브 뚜껑 회전을 담당합니다. FEM(유한요소해석)으로 구조 강도를 검증했습니다.
🔬 D-ONE Assist Plus — 자동 피페팅 스테이션
INTEGRA Biosciences의 전자 피페팅 자동화 장치입니다. 전동 피페트를 XYZ 포지셔너 위에 장착해 마이크로리터 단위의 정밀 피페팅을 자동으로 수행합니다. 배지 위에 균일하게 샘플을 이식해 실험 재현성을 보장합니다.
🏗️ 선형 레일 시스템 — HIWIN 가이드
Dobot MG400이 고정된 채로는 캐비닛 전체 구간을 커버하기 어렵습니다. HIWIN 선형 가이드 레일 위에서 로봇 팔 전체가 수평 이동합니다. Easy Servo Motor + 볼 스크류 구동, PID 제어. 시뮬레이션 결과: 정착 시간 5.61초, 오버슈트 0%.
🖥️ Siemens S7-1200 PLC + KTP400 HMI
산업 표준 PLC가 전체 공정 시퀀스를 제어합니다. TIA Portal에서 프로그래밍되며 Profinet/Ethernet으로 로봇, HMI, 마이크로컨트롤러와 통신합니다. KTP400 Basic HMI로 공정 시작/정지, 완료 수량, 피펫 잔량, 공정 상태(정상/오류)를 표시합니다.
🔌 Arduino Nano + W5500 (W550 Lite)
그리퍼 서브시스템 제어를 담당하는 슬레이브 컨트롤러입니다. W5500 기반 이더넷 모듈로 PLC 네트워크에 연결되어 명령을 수신하고 센서 데이터를 반환합니다. 전용 PCB로 설계되어 바이오안전 캐비닛 내 전자부품 케이스에 수납됩니다.
🏠 바이오안전 캐비닛 Class II — NU-543-500E
모든 구성 요소가 이 캐비닛 안에 들어갑니다. HEPA 필터로 공기 중 결핵균 입자를 99.97% 차단합니다. NSF Standard 49 / EN-12469 규격을 준수합니다. 캐비닛 크기: 1700×800×1600mm.
05 — 응용 시나리오
01. 결핵 전문 연구소 — 대량 감수성 실험 자동화
수동으로는 하루에 처리할 수 있는 샘플 수가 기술자의 체력과 집중력에 달려 있습니다. 이 시스템은 24시간 가동이 가능해 처리량을 대폭 늘릴 수 있습니다. 페루처럼 TB-MDR 발생률이 높은 국가의 공중보건 연구소에 특히 적합합니다. #결핵연구 #공중보건 #대량처리
02. BSL-3 실험실 — 기술자 감염 위험 제거
결핵균 샘플을 직접 다루는 작업에서 인간 기술자를 완전히 분리합니다. 로봇이 모든 샘플 접촉 단계를 수행하고 기술자는 캐비닛 외부에서 HMI로만 조작합니다. 장기 노출로 인한 직업병 위험을 근본적으로 줄입니다. #바이오안전 #직업안전 #BSL3
03. 신약 개발 — 새로운 항생제 후보 스크리닝
TB-MDR과 TB-XDR에 대한 새로운 치료제를 개발하려면 수백 가지 항생제 조합을 테스트해야 합니다. 이 시스템의 반복 작업 자동화 능력은 고처리량 스크리닝(HTS)에 직접 활용될 수 있습니다. #신약개발 #HTS #항생제스크리닝
04. 의과대학 — 안전한 실험 교육 플랫폼
학생들이 실제 병원성 균을 다루지 않고도 감수성 실험 절차를 학습할 수 있는 플랫폼으로 활용할 수 있습니다. HMI를 통한 직관적인 조작으로 진입 장벽을 낮춥니다. #의학교육 #실험실교육 #안전교육
05. 플랫폼 확장 — 다른 병원성 세균으로 확장
설계 자체는 결핵균에 특화되어 있지만, 샘플 크기와 프로토콜이 유사한 다른 세균(살모넬라, MRSA 등)의 감수성 실험에도 같은 시스템 구조를 적용할 수 있습니다. #MRSA #세균감수성 #플랫폼확장
06 — 비용
| 항목 | 페루 솔 (S/.) | 한화 (약) |
|---|---|---|
| 기계 부품 | S/. 965 | 약 39만 원 |
| 전자 부품 | S/. 41,189 | 약 1,648만 원 |
| 제작 비용 | S/. 4,820 | 약 193만 원 |
| 총 비용 | S/. 46,974 | 약 1,879만 원 |
전자 부품 비용의 대부분은 바이오안전 캐비닛(S/. 22,764, 약 911만 원)과 Dobot MG400 로봇 팔(S/. 10,964, 약 439만 원)이 차지합니다. 상용 자동화 실험 시스템(AUTOPLAK 등)의 가격이 120,000 USD(약 1억 7천만 원)인 것과 비교하면 현저히 낮은 비용입니다.
07 — 한계와 향후 과제
| 항목 | 현재 상태 | 향후 과제 |
|---|---|---|
| 검증 방식 | 시뮬레이션만 | 실물 프로토타입 제작 및 실험 검증 |
| 공정 커버리지 | 핵심 3단계만 | 전체 실험 라인 자동화 |
| 제어 정밀도 | PID 시뮬레이션 | 실제 플랜트 데이터로 튜닝 |
| 재현성 검증 | 미실시 | 반복 피페팅 정확도 측정 |
| 인증 | 미취득 | 의료/실험실 기기 인증 |
결론
기술자가 결핵균에 노출되는 반복 작업 — 로봇이 대신한다.
결핵 약물 감수성 실험은 전 세계 수십만 명의 생명과 직결된 작업입니다. 그리고 그 작업을 하는 실험실 기술자는 항상 감염 위험을 감수해야 했습니다. 이 논문이 설계한 시스템은 그 위험을 제거하는 첫 번째 시도입니다.
W5500 기반 이더넷 모듈이 PLC 산업 네트워크에 Arduino 마이크로컨트롤러를 연결해 안정적인 마스터-슬레이브 제어 구조를 완성합니다. 금속 캐비닛 내부의 EMI 환경에서도 유선 이더넷은 흔들리지 않습니다.
아직 시뮬레이션 단계이지만, 설계의 방향성은 명확합니다. 사람이 해야 했던 위험한 작업을 기계가 대신할 수 있다는 것.
- ✅ BSL-3 바이오안전 캐비닛 내 완전 밀폐 자동화
- ✅ Dobot MG400 + 전용 TPU 그리퍼로 샘플 정밀 핸들링
- ✅ D-ONE Assist Plus 자동 피페팅 스테이션
- ✅ PLC S7-1200 마스터 + Arduino/ESP32 슬레이브 계층 제어
- ✅ W5500 유선 이더넷으로 EMI 환경에서 안정적인 통신
- ✅ FEM 시뮬레이션으로 구조 강도 검증
- ✅ 상용 시스템 대비 1/10 이하 비용
Q&A
Q. 결핵균 약물 감수성 실험이란 무엇인가요? 결핵균이 특정 항생제에 반응하는지 알아보는 실험입니다. 항생제가 포함된 배지(아가)가 든 페트리 접시에 결핵균 샘플을 심고, 균이 자라는지 관찰합니다. 자라지 않으면 그 항생제에 감수성이 있다는 뜻입니다. 다제내성 결핵(TB-MDR) 치료제 선택에 필수적인 검사입니다.
Q. 왜 이 실험을 자동화해야 하나요? 결핵균은 공기 중으로 퍼지는 특성이 있어 샘플을 직접 다루는 실험실 기술자의 감염 위험이 높습니다. 또한 피페팅 같은 반복 작업은 피로로 인한 오류가 생기기 쉽습니다. 자동화는 기술자의 감염 위험 제거와 실험 재현성 향상을 동시에 달성합니다.
Q. 바이오안전 캐비닛 Class II란 무엇인가요? 위험한 생물학적 물질을 다루는 밀폐 작업 공간입니다. HEPA 필터가 공기 중 병원균 입자를 99.97% 이상 차단하고, 음압 구조로 내부 공기가 외부로 나가지 않도록 합니다. 결핵균처럼 공기 전파 위험이 있는 병원체를 다루는 BSL-3 실험에 필수입니다.
Q. 왜 PLC와 마이크로컨트롤러를 함께 사용하나요? PLC는 신뢰성과 실시간 제어에 강하지만 소형 서보모터나 센서를 세밀하게 다루기에는 과사양입니다. Arduino Nano와 ESP32 같은 마이크로컨트롤러가 각 서브시스템을 담당하고, PLC가 전체 공정 시퀀스를 조율하는 마스터-슬레이브 구조가 비용과 성능 면에서 최적입니다.
Q. W5500이 이 시스템에서 어떤 역할을 하나요? Arduino Nano 마이크로컨트롤러를 PLC의 산업용 이더넷 네트워크에 연결합니다. W5500 하드웨어 TCP/IP 스택이 마이크로컨트롤러의 CPU 부담 없이 안정적인 이더넷 통신을 처리합니다. 바이오안전 캐비닛 내부의 전기 모터와 금속 구조물로 인한 EMI 환경에서 유선 이더넷의 안정성이 중요합니다.
Q. 이 시스템의 총 비용은 얼마인가요? 설계 기준 총 비용은 페루 솔 S/. 46,974로 한화 약 1,879만 원입니다. 비용의 대부분은 바이오안전 캐비닛(약 911만 원)과 Dobot MG400 로봇 팔(약 439만 원)입니다. 상용 통합 자동화 시스템이 1억 원 이상인 것에 비해 현저히 낮습니다.
Q. 현재 실제로 작동하는 시스템이 있나요? 아직 없습니다. 이 논문은 설계 단계입니다. 3D 모델링(Inventor), FEM 시뮬레이션(ANSYS), 제어 시뮬레이션(MATLAB Simulink)으로 설계를 검증했습니다. 다음 단계는 실물 프로토타입 제작 및 실험 검증입니다.