
Lie Group-based Shape Sensing and Optimal String Sensor Placement Analysis for Continuum Robots
Lie Group Formulation and Sensitivity Analysis for Shape Sensing of Variable Curvature Continuum Robots with General String Encoder Routing
[Author Information]
The authors are affiliated with research institutions in the United States (USA).
Vanderbilt University: Nashville, Tennessee
Carnegie Mellon University: Pittsburgh, Pennsylvania
1. Overview
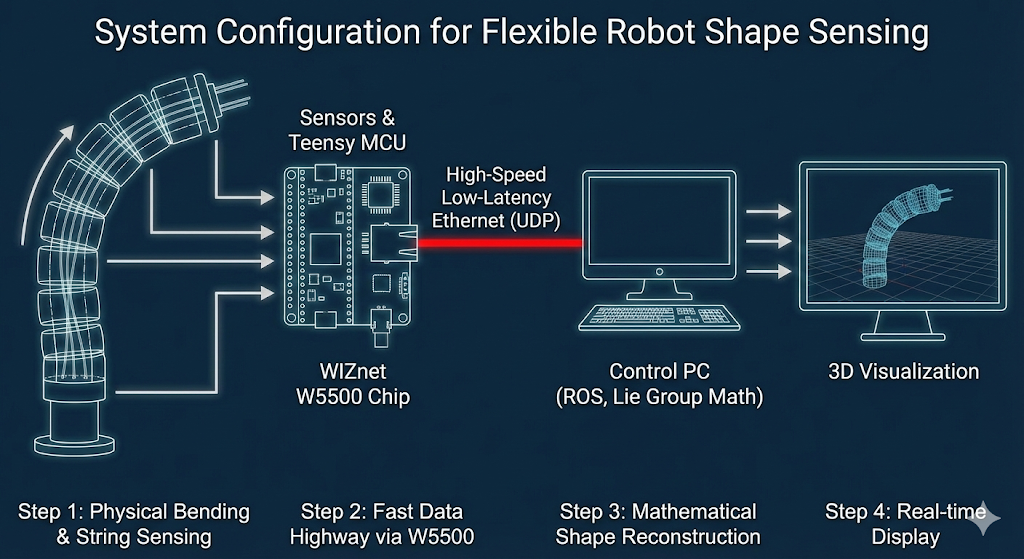
This project involves a shape sensing system for Continuum Robots, which feature flexible, backbone-like structures. Instead of using expensive external cameras, the system utilizes internal string encoders to measure the robot's curvature and shape in real-time. WIZnet's Ethernet solution is used to transmit this precise sensor data to the main control system (ROS) via UDP without latency.
In short, this paper researches and develops a complete technological solution—spanning from complex mathematical calculation models to high-speed data transmission hardware—that allows a flexible, bone-less robot (soft robot), like an octopus arm, to determine its exact 3D shape in real-time using only the measurement of internal string tension, without needing cumbersome external cameras.
1.1 Core Hardware Specs
WIZnet Chip: W5500 (utilized via the WIZ850io Ethernet module)
MCU: Teensy 4.1 (NXP i.MX RT1062)
2. Core Technology & Environment
The system operates in a specialized environment requiring high-speed data acquisition and processing for robotic control.
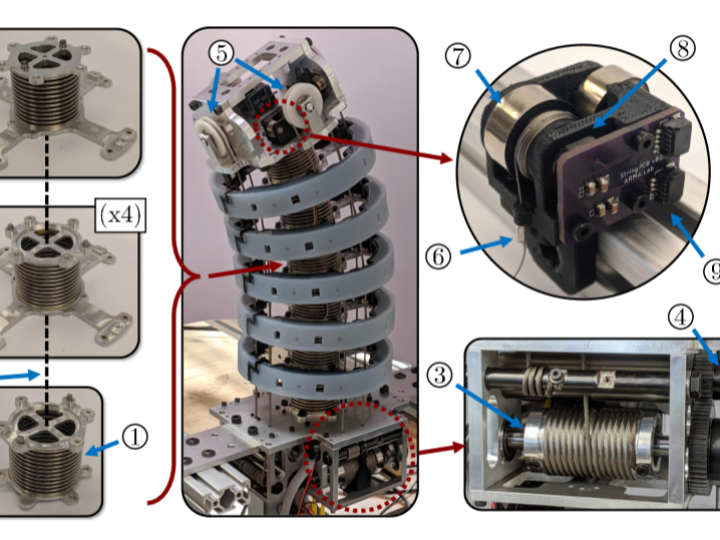
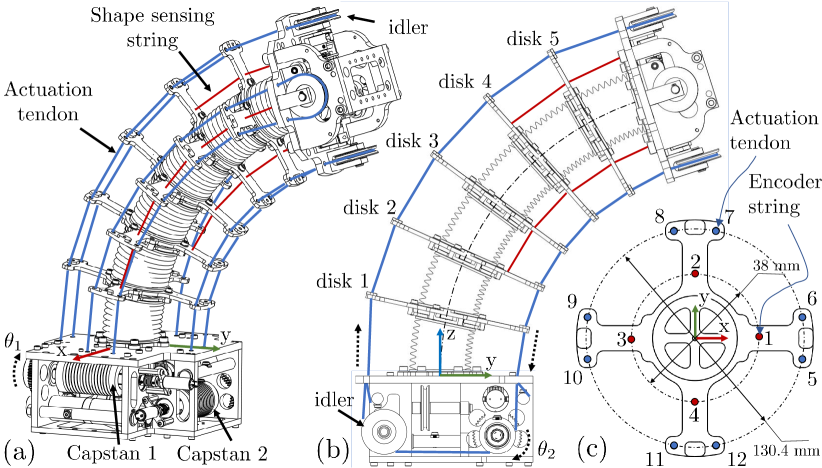
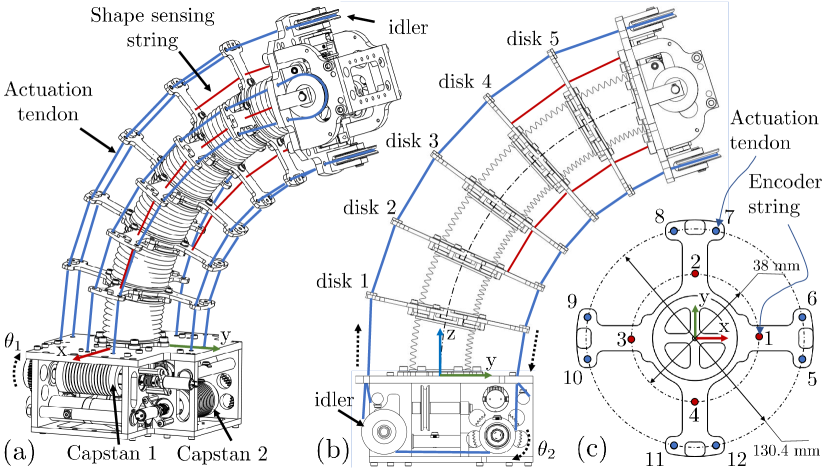
String Encoder-based Sensing: The robot uses multiple strings running through its body. As the robot bends or twists, the length of these strings changes. Magnetic encoders measure these minute changes to calculate the robot's shape.
Real-time UDP Communication: The sensor data, read at approximately 150 Hz by the microcontroller, must be transmitted to the Robot Operating System (ROS) node instantaneously. The WIZ850io (W5500) handles this via UDP, ensuring that the high-frequency position data is delivered with minimal delay.
Lie Group Formulation: A mathematical approach used to model the complex curvature and kinematics of the soft robot based on the string length data.
Rigid Robots vs. Continuum Robots: Why Do We Need Complex Formulas?
Rigid Robots (Hinge Style): These consist of stiff segments moving around fixed joints (motors). Since we know the exact motor angles, calculating the robot's position is as simple as basic trigonometry.
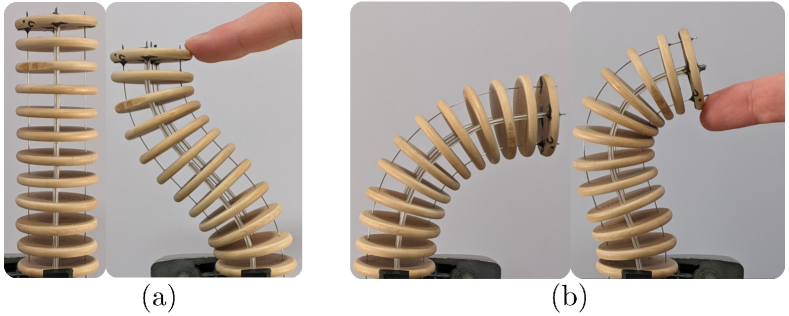
Continuum Robots (Garden Hose Style): These have no rigid bones; every part of the body can bend continuously. Because they have "infinite joints," it is impossible to tell if the robot is bent in a simple C-shape or a complex S-shape just by knowing how much the internal strings were pulled.
Role of the Mathematical Formula: A sophisticated equation is essential to "infer" the exact 3D curve (like a 3rd or 4th-degree S-shape) from minute changes in string length. Without this formula, the robot remains a blind mass, unable to perceive its own form.
WIZnet’s Key Contribution
To process these complex mathematical inferences in real-time, data transmission must have zero margin for error or lag. The WIZnet W5500 serves as a "high-speed neural network," transmitting string displacement data with zero delay. This allows the computer to calculate and display the robot's intricate movements on a 3D screen the very instant they happen.
3. Development Details (Calibration)
The research paper highlights a meticulous calibration process. To ensure the accuracy of the string encoders, the team used a 3-DoF Cartesian robot to extend and release the strings in precise 0.2 mm increments. This rigorous testing ensured that the extension measurement error was kept below 0.1 mm, proving the reliability of the physical data that the WIZnet chip would later transmit.
4. Core Purpose & WIZnet's Contribution
The primary goal of this project was to achieve accurate intrinsic shape sensing for soft robots—meaning the robot knows its own shape without needing external sensors (like cameras) watching it.
WIZnet's Contribution: In robotic feedback loops, latency is critical. The Teensy 4.1 reads the encoder data via I2C, but this data is useless if it stays on the chip. The W5500 acts as the high-speed bridge, offloading the network stack processing and enabling the system to broadcast sensor packets via UDP at 150 Hz to the ROS-based PC. This stability allows the main computer to reconstruct the robot's shape in real-time for precise control.
5. Deep Dive: How It Works
"Measuring Shape with Strings and Speed"
Imagine a flexible tube that can bend in any direction. If you run a string through the inside of the curve, the string has a shorter path than if it ran along the outside. By measuring exactly how much string is pulled in or out, you can mathematically calculate how the tube is bending.
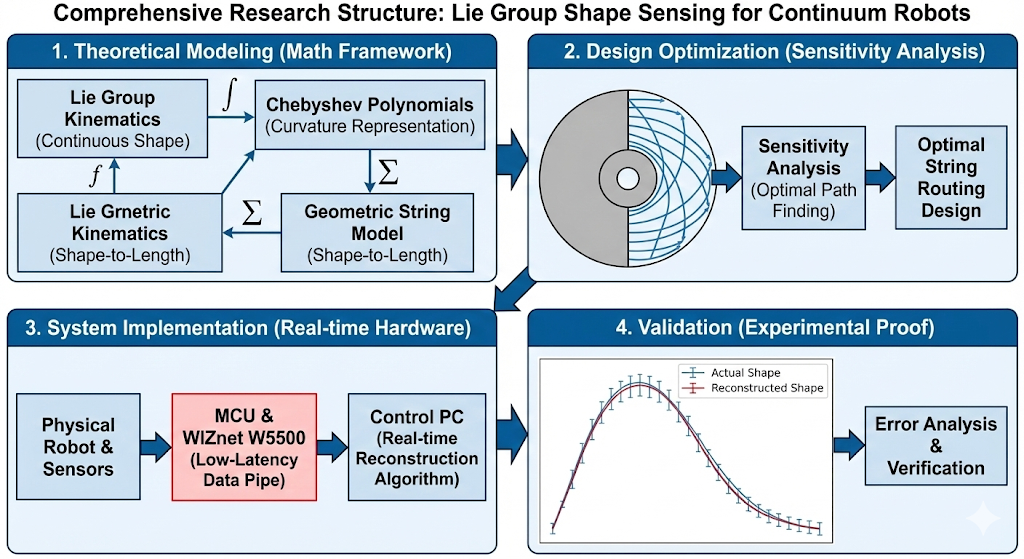
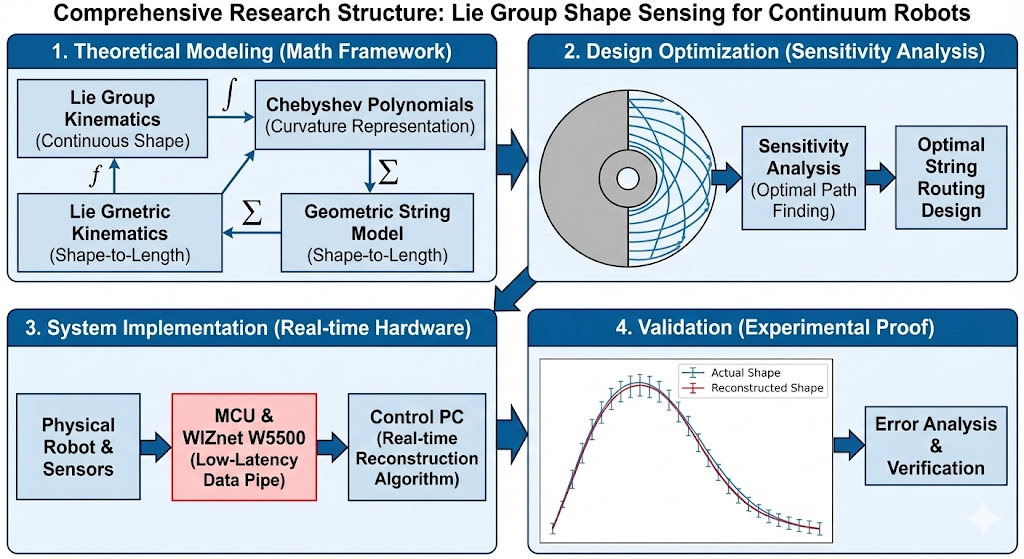
Ladies and gentlemen, the diagram before you is not just a flowchart. It is the comprehensive blueprint of a journey—taking complex, abstract mathematical theory and turning it into a tangible, high-precision robotic reality.
Let me walk you through the four critical stages of this remarkable project, highlighting how theory transforms into action.
Stage 1: Theoretical Modeling (Top Left) – Designing the Mathematical "Brain" It all begins in the abstract. How do you define the shape of a robot that has no bones or joints, like an elephant's trunk? The researchers combined advanced Lie Group Kinematics with efficient mathematical tools called Chebyshev Polynomials. This creates the "mathematical brain" capable of translating simple string pulls into complex, continuous 3D shapes.
Stage 2: Design Optimization (Top Right) – Finding the Perfect "Nervous System" Before building the hardware, they had to optimize the design. Where exactly should the sensor strings be placed inside the robot body for maximum sensitivity? Using their math model, they performed a rigorous Sensitivity Analysis. This simulation determined the Optimal String Routing, ensuring the physical hardware would be as accurate as possible from the start.
Stage 3: System Implementation (Bottom Left) – The High-Speed Data Bridge This is where theory meets reality. They built the physical robot and sensors, but a critical challenge remained: getting massive amounts of raw sensor data to the control PC instantly. Look at the red highlighted box. This is where the WIZnet W5500 plays its vital role. It acts as a low-latency hardware data pipe. It ensures that the complex algorithms running on the PC receive the sensor "feelings" in real-time, without any lag that would crash the system.
Stage 4: Validation (Bottom Right) – The Proof of Success Finally, does it actually work? The results speak for themselves. The graph shows the robot's Actual Shape (in blue) and the mathematically Reconstructed Shape (in red) overlapping almost perfectly. This proves that the combination of rigorous theory, optimized design, and stable WIZnet connectivity successfully delivered high-precision real-time sensing.
In summary, this diagram illustrates a complete success story: transforming difficult mathematical concepts into practical technology. And crucially, it highlights how WIZnet's reliable networking technology serves as the essential bridge that makes this real-time implementation possible.
6. Strategic Value & Scalability
This technology is highly applicable to fields where "soft" interaction is necessary, such as:
As industries advance, the focus is shifting from simple data logging to processing massive volumes of information in real-time.
Modern continuum robots require a sophisticated mathematical brain to sense their intricate shapes without cameras, relying solely on minute changes in internal string length. For this "brain" to function in the real world, sensor data must be transmitted instantly without even a millisecond of lag. WIZnet’s W5500 provides this essential high-speed neural network, ensuring the real-time synchronization required for complex control. In this high-tech era, Ethernet is evolving into the critical infrastructure that brings advanced algorithms to life..
연속체 로봇을 위한 리 군(Lie Group) 기반 형상 감지 및 최적 스트링 센서 배치 분석
[저자 정보]
저자들은 **미국(USA)**의 연구 기관에 소속
밴더빌트 대학교 (Vanderbilt University): 테네시주 내슈빌
카네기 멜런 대학교 (Carnegie Mellon University): 펜실베이니아주 피츠버그
1. 개요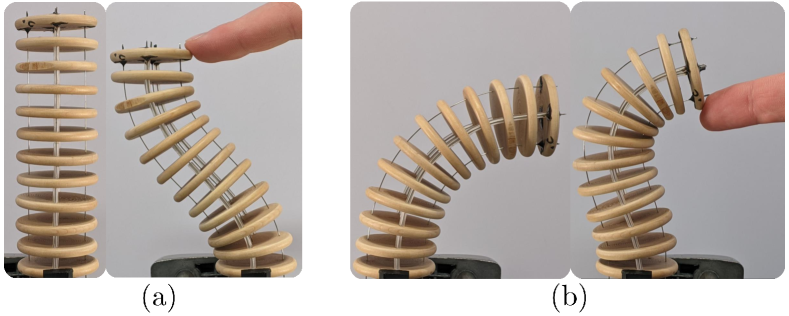
이 프로젝트는 유연한 척추 구조를 가진 **연속체 로봇(소프트 로봇)**의 형상을 실시간으로 추적하는 시스템입니다. 고가의 외부 카메라 장비 대신, 로봇 내부에 장착된 **스트링 인코더(String Encoder)**를 통해 로봇의 굽힘과 모양을 계산합니다. 위즈네트의 이더넷 솔루션은 이렇게 수집된 정밀 센서 데이터를 지연 없이 메인 제어 시스템(ROS)으로 전송하는 데 사용되었습니다.
문어 다리처럼 뼈대 없는 유연한 로봇(소프트 로봇)이 거추장스러운 외부 카메라 없이도 몸속에 설치된 줄(String)의 당김 정도만 측정하여 자신의 정확한 3D 모양을 실시간으로 알아낼 수 있도록 만드는 '전체적인 기술 솔루션(복잡한 수학적 계산 모델부터 고속 데이터 전송 하드웨어까지)'을 연구하고 개발한 것입니다.
1.1 핵심 HW 칩에 대한 설명
사용된 Wiznet 칩: W5500 (WIZ850io 이더넷 모듈 탑재)
MCU: Teensy 4.1 (NXP i.MX RT1062)
OS : ROS
2. 핵심 기술 및 환경
일반 로봇 vs. 연속체 로봇: 왜 복잡한 공식이 필요할까?
일반 로봇 (문 경첩 방식): 딱딱한 마디가 정해진 관절(모터)을 중심으로 움직입니다. 모터가 돌아간 각도만 알면 삼각함수 수준의 단순한 계산으로도 위치를 바로 알 수 있습니다.
이 논문의 로봇 (정원 호스 방식): 뼈대 없이 몸체 모든 부분이 구부러지는 '무한 관절' 구조입니다. 단순히 내부 줄이 당겨진 길이만으로는 로봇이 C자로 굽었는지 S자로 꼬였는지 알 수 없습니다.
수학 공식의 역할: 줄이 당겨진 미세한 차이를 분석해 "지금 로봇은 몇 차 함수 모양인 S자로 휘어 있다"라고 모양을 추론해내는 복잡한 수식이 필수적입니다. 이 공식이 없으면 로봇은 자신의 형태를 전혀 알 수 없는 무용지물이 됩니다.
핵심 기술 구성
이 시스템은 로봇 제어를 위해 고속 데이터 수집과 처리가 필수적인 환경에서 운영됩니다.
스트링 인코더 기반 감지 (String Encoder-based Sensing): 로봇 내부에 여러 개의 줄(String)을 배치하여, 로봇이 구부러지거나 비틀릴 때 줄의 길이가 변하는 것을 측정합니다. 마그네틱 인코더가 이 미세한 길이 변화를 감지하여 로봇의 형상을 역추적합니다.
실시간 UDP 통신: 마이크로컨트롤러(Teensy)가 약 150Hz의 속도로 읽어 들인 센서 데이터는 즉시 로봇 운영 체제(ROS) 노드로 전송되어야 합니다. WIZ850io(W5500)는 이 데이터를 UDP 프로토콜을 통해 PC로 전송하며, 데이터 손실이나 지연을 최소화하여 실시간성을 보장합니다.초당 약 150회에서 200회(150Hz ~ 200Hz)의 데이터를 주고받습니다.
리 군(Lie Group) 수식화: 스트링 길이 데이터를 바탕으로 소프트 로봇의 복잡한 곡률과 운동학을 모델링하기 위해 사용된 수학적 접근 방식입니다.
위즈네트(WIZnet)의 핵심 기여
이 정교한 수식을 실시간으로 처리하려면 데이터 전송에 1ms의 오차도 없어야 합니다. WIZnet W5500은 줄의 길이 변화 데이터를 지연 없이(Zero-delay) 컴퓨터로 쏴주는 '초고속 신경망' 역할을 수행하여, 로봇의 복잡한 움직임을 실시간 3D 화면으로 구현할 수 있게 했습니다.
3. 개발 스토리 (보정 과정)
논문에서는 센서의 정확도를 높이기 위한 치밀한 보정(Calibration) 과정을 언급하고 있습니다. 개발팀은 3축 직교 로봇(Cartesian robot)을 이용해 스트링을 0.2mm 단위로 정밀하게 당기고 놓는 테스트를 수행했습니다. 이러한 과정을 통해 인코더의 측정 오차를 0.1mm 미만으로 줄였으며, 이는 위즈네트 칩이 전송하게 될 데이터가 물리적으로 매우 신뢰할 수 있는 정보임을 보장하는 기반이 되었습니다.
4. 핵심 목적
이 프로젝트의 핵심 목표는 외부 관측 장비 없이 로봇 스스로 자신의 모양을 파악하는 **'내재적 형상 감지(Intrinsic Shape Sensing)'**를 구현하는 것입니다.
위즈네트의 기여: 로봇의 피드백 제어 루프에서 통신 지연(Latency)은 치명적일 수 있습니다. Teensy 4.1 MCU가 I2C 통신으로 인코더 값을 읽어들이지만, 이 데이터를 PC로 빠르게 보내지 못하면 의미가 없습니다. W5500은 하드웨어적으로 네트워크 프로토콜을 처리하여, MCU의 부하를 줄이면서도 150Hz의 빠른 속도로 센서 패킷을 안정적으로 송출하는 '고속 브리지' 역할을 수행했습니다. 덕분에 메인 컴퓨터는 로봇의 현재 모양을 실시간으로 재구성하고 제어할 수 있었습니다.
5. 핵심 기술 파헤치기
"줄(String)과 속도로 그려내는 로봇의 형상"
자유자재로 휘어지는 튜브를 상상해 보세요. 튜브가 오른쪽으로 굽어지면, 안쪽을 지나가는 줄은 바깥쪽을 지나가는 줄보다 경로가 짧아집니다. 이 줄이 얼마나 당겨지고 풀리는지를 정확히 측정하면, 수학적으로 튜브가 어떻게 휘어있는지 계산할 수 있습니다.
이 놀라운 프로젝트가 이론에서 실체로 변화하는 4단계의 여정을 안내해 드리겠습니다.
1단계: 이론적 모델링 (왼쪽 상단) – 수학적 "두뇌" 설계 모든 것은 추상적인 영역에서 시작됩니다. 코끼리 코처럼 뼈대나 관절이 없는 로봇의 3차원 모양을 어떻게 정의할 수 있을까요? 연구진은 고난도의 'Lie Group 기구학' 이론과 효율적인 수학 도구인 **'체비쇼프 다항식'**을 결합했습니다. 이것이 바로 단순한 줄(String)의 당김을 복잡한 연속적인 3D 형태로 변환해내는 '수학적 두뇌'가 됩니다.
2단계: 설계 최적화 (오른쪽 상단) – 최적의 "신경망" 탐색 하드웨어를 만들기 전에 설계 최적화가 필요했습니다. 최고의 민감도를 위해 센서 줄을 로봇 내부 어디에 배치해야 할까요? 그들은 앞서 만든 수학 모델을 사용하여 철저한 **'민감도 분석'**을 수행했습니다. 이 시뮬레이션을 통해 하드웨어의 정확도를 극대화할 수 있는 **'최적의 스트링 경로(Optimal String Routing)'**를 결정했습니다.
3단계: 시스템 구현 (왼쪽 하단) – 초고속 데이터 브리지 이곳이 이론이 현실을 만나는 지점입니다. 물리적 로봇과 센서를 만들었지만, 결정적인 과제가 남았습니다. 어떻게 대량의 센서 데이터를 제어 PC로 '즉시' 전송할 것인가? 붉은색으로 강조된 박스를 보십시오. 여기가 바로 WIZnet W5500이 핵심 역할을 수행하는 곳입니다. W5500은 '저지연 하드웨어 데이터 파이프라인' 역할을 수행하여, PC에서 돌아가는 복잡한 알고리즘이 시스템을 멈추게 하는 지연(lag) 없이 실시간으로 센서 데이터를 받아 처리할 수 있도록 보장합니다.
4단계: 검증 (오른쪽 하단) – 성공의 증명 마지막으로, 이 시스템이 실제로 작동할까요? 결과가 말해줍니다.로봇의 **'실제 형상(파란색)'**과 수학적으로 **'재구성된 형상(빨간색)'**을 비교합니다.. 이는 철저한 이론, 최적화된 설계, 그리고 안정적인 WIZnet 연결의 결합이 고정밀 실시간 센싱을 성공적으로 구현했음을 증명합니다.
요약하자면, 이 다이어그램은 난해한 수학적 개념이 실용적인 기술로 변모하는 성공적인 전체 스토리를 보여줍니다. 그리고 결정적으로, 이 실시간 구현을 가능하게 만드는 필수적인 가교로서 WIZnet의 신뢰성 높은 네트워킹 기술이 어떤 역할을 했는지 강조하고 있습니다.
6. 가치 제안 및 확장성
이 기술은 '부드러운' 상호작용이 필요한 분야에서 높은 가치를 지닙니다:
산업이 고도화될수록 과거처럼 단순한 데이터 기록에 머무는 것이 아니라, 방대한 양의 정보를 실시간으로 처리하는 능력이 핵심 경쟁력이 되고 있습니다.
특히 정교하게 움직이는 유연한 로봇들은 카메라가 없는 환경에서도 줄의 미세한 길이 변화를 분석해 자신의 모양을 스스로 알아내는 고난도의 수학적 두뇌가 필수적입니다. 이 똑똑한 두뇌가 현실에서 실시간으로 작동하기 위해서는 수많은 센서 데이터를 찰나의 지연도 없이 전송해야 하는데, 위즈네트의 W5500은 이를 완벽하게 수행하는 초고속 신경망 역할을 합니다. 결국 데이터의 양과 속도가 기술의 성패를 가르는 미래 산업에서, 안정적인 이더넷 통신은 복잡한 알고리즘을 생생하게 구현해내는 가장 중요한 인프라가 될 것입니다.