
EME-CRTL-KGK-001
EME Rotator Controller
프로젝트 개요 (KR)
EME-CRTL-KGK-001은
EME(Earth-Moon-Earth) 무선 통신을 위해 대형 파라볼라 안테나의 방위각(Azimuth)과 고각(Elevation)을
정밀하게 제어하는 오픈소스 로테이터 컨트롤러입니다.
*EME : 인공위성 없이 가능한 가장 긴 거리의 무선 통신
- 지상에서 구현 가능한 가장 극한의 무선 통신 조건을 인위적으로 만들어내고,
안테나·RF·신호처리·제어·운용 기술이 실제 환경에서도 통합적으로 동작함을 검증하는 시스템 공학 실험이다.
- EME 통신은 안테나 방향 오차가 0.1°만 나도 통신 품질이 급격히 저하
- 따라서 정밀한 위치 인식 + 안정적인 모터 제어 + 원격 제어가 필수
달의 위치를 자동으로 추적하여 안테나를 정확히 조향할 수 있도록 설계되었으며,
Arduino Mega와 W5500 Ethernet 모듈을 기반으로
원격 제어, 자동 추적, 안전 제어 기능을 모두 통합한 실사용 목적의 시스템입니다.
하드웨어 구성 (KR)
- MCU: Arduino Mega 2560
- 엔코더: SSI Absolute Encoder (HH-12, 12bit)
- 안테나의 실제 방위각과 고각을 전원 상태와 무관하게 절대값으로 제공하는 위치 센서
- 모터: NEMA23 스테퍼 모터
- 드라이버: TB6600
- 네트워크: W5500 Ethernet Module
- 안전 장치: 리미트 스위치, 수동 버튼
시스템 아키텍처 (KR)
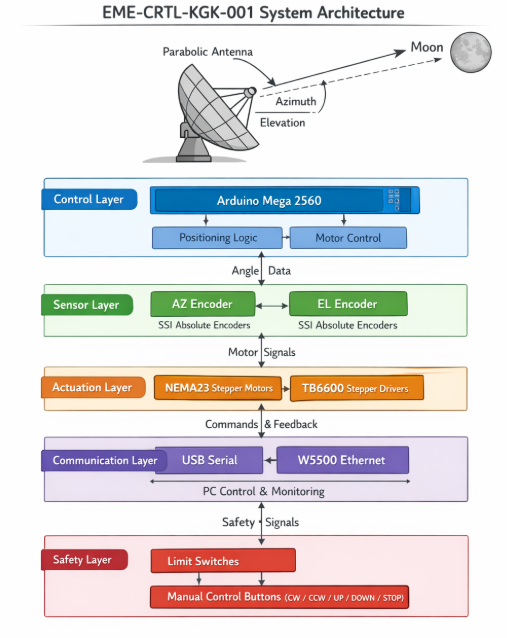
제어 계층
- Arduino Mega 2560
- 위치 계산 및 모터 제어 로직 수행
센서 계층
- SSI Absolute Encoder (Azimuth / Elevation)
- 실시간 안테나 각도 피드백
구동 계층
- NEMA23 스테퍼 모터
- TB6600 스테퍼 드라이버
통신 계층
- USB Serial
- Ethernet (W5500, Easycom Protocol)
안전 계층
- 리미트 스위치
- 수동 제어 버튼
통신 및 제어 방식 (KR)
본 시스템은 Easycom 프로토콜을 사용하여
PC 기반 안테나 제어 소프트웨어와 연동됩니다.
- TCP/IP 기반 Ethernet 제어 (Port 4533)
- USB Serial 직접 제어 지원
- 원격에서 달 추적 소프트웨어가 각도 명령 전송
- 컨트롤러는 실시간 각도 피드백 제공
프로젝트 차별점 (KR)
- EME 통신 환경에 맞춘 고정밀 각도 제어
- Absolute Encoder(SSI) 사용으로 전원 재시작 후에도 위치 유지
- Easycom 프로토콜 지원 → 상용 로테이터 소프트웨어와 호환
- Ethernet(W5500) 기반 원격 제어 안정성
- 아마추어 무선 환경에서도 상용 장비 수준의 구조를 오픈소스로 구현
프로젝트 의의 (KR)
본 프로젝트는
고가의 상용 EME 로테이터 컨트롤러에서만 가능했던 기능을
아마추어 무선 사용자도 직접 구현할 수 있도록 공개한 사례입니다.
정밀 제어, 안정성, 확장성을 모두 고려한 구조로
실제 운용을 목표로 한 실전형 오픈소스 프로젝트입니다.
Project Overview (EN)
EME-CRTL-KGK-001 is an open-source antenna rotator controller designed for
Earth-Moon-Earth (EME) radio communication.
The system precisely controls azimuth and elevation of a large parabolic antenna,
enabling automatic lunar tracking.
Built on Arduino Mega and W5500 Ethernet, the project integrates
remote control, automated tracking, and safety mechanisms for real-world operation.
Key Differentiators (EN)
- High-precision angle control tailored for EME communication
- SSI absolute encoders ensure position retention after power cycles
- Easycom protocol compatibility with common rotator software
- Stable Ethernet-based remote control using W5500
- Open-source implementation approaching commercial-grade rotator systems
System Architecture (EN)
The system is structured into the following layers:
Control Layer
- Arduino Mega 2560
- Executes positioning and motor control logic
Sensor Layer
- SSI absolute encoders for azimuth and elevation
- Real-time angle feedback
Actuation Layer
- NEMA23 stepper motors
- TB6600 stepper drivers
Communication Layer
- USB Serial
- Ethernet (W5500 with Easycom protocol)
Safety Layer
- Limit switches
- Manual control buttons
Hardware Components (EN)
- MCU: Arduino Mega 2560
- Encoders: SSI Absolute Encoder (HH-12, 12-bit)
- Motors: NEMA23 Stepper Motors
- Drivers: TB6600
- Networking: W5500 Ethernet Module
- Safety Devices: Limit switches, manual buttons
Communication & Control (EN)
The controller communicates using the Easycom protocol,
allowing integration with PC-based antenna control software.
- TCP/IP Ethernet control (Port 4533)
- Direct USB Serial control
- PC software sends tracking commands
- Controller returns real-time position feedback
Significance of the Project (EN)
This project demonstrates that
features traditionally limited to expensive commercial EME rotator controllers
can be implemented by amateur radio operators using open-source hardware and software.
It is a practical, real-world system designed with precision, reliability, and scalability in mind.