
ESP32S3_W5500_SOES
A software EtherCAT slave built with ESP32-S3 and WIZnet W5500. No dedicated ESC chip needed — raw frames processed in software via SOES stack.

Software EtherCAT Slave Built with ESP32-S3 + W5500
An open-source project that implements a fully functional EtherCAT slave using only a general-purpose MCU and an SPI Ethernet chip — no dedicated ESC hardware required.
| Item | Details |
|---|---|
| Author | egerobotics |
| Target Technology | Software EtherCAT Slave Controller (ESC) emulation |
| Hardware | ESP32-S3 + WIZnet W5500 (SPI Ethernet) |
| EtherCAT Stack | SOES (Simple Open EtherCAT Slave, GPLv2) |
| Build Environment | ESP-IDF v5.3.x, CMake |
| Compatible Masters | TwinCAT 3 and other standard EtherCAT masters |
| GitHub | egerobotics/ESP32S3_W5500_SOES |
What Is This Project?
EtherCAT is an industrial communication protocol widely used in factory automation. Robot arms, servo motors, and I/O modules all use EtherCAT to communicate with a master controller.
The catch is that building an EtherCAT slave device normally requires a dedicated hardware chip called an ESC (EtherCAT Slave Controller). Without it, EtherCAT communication simply isn't possible — at least, not in the conventional approach.
This project replaces that dedicated chip entirely in software. By combining an ESP32-S3 microcontroller with a WIZnet W5500 Ethernet chip, it implements a fully functional EtherCAT slave — no ASIC required. The system has been verified to work with TwinCAT 3, one of the industry-standard EtherCAT master platforms, including device discovery and I/O control.
💡 In one sentence: An open-source project that implements a software EtherCAT slave using only an ESP32-S3 + W5500 — no expensive dedicated chip needed.
1. Background
EtherCAT is a real-time Ethernet protocol used in industrial automation. Devices such as servo drives, distributed I/O modules, and motion controllers that need to operate as EtherCAT slaves typically require a dedicated EtherCAT Slave Controller (ESC) ASIC — such as Beckhoff's ET1100/ET1200 or Microchip's LAN9252.
The problem is that these dedicated chips add cost and complexity even at the earliest stages of development. Validating EtherCAT slave behavior still requires an ASIC-based circuit first.
ESP32S3_W5500_SOES bypasses this assumption entirely in software. By combining the ESP32-S3, WIZnet W5500, and the SOES stack, it emulates the full EtherCAT slave controller functionality without any dedicated ESC hardware.
2. Components
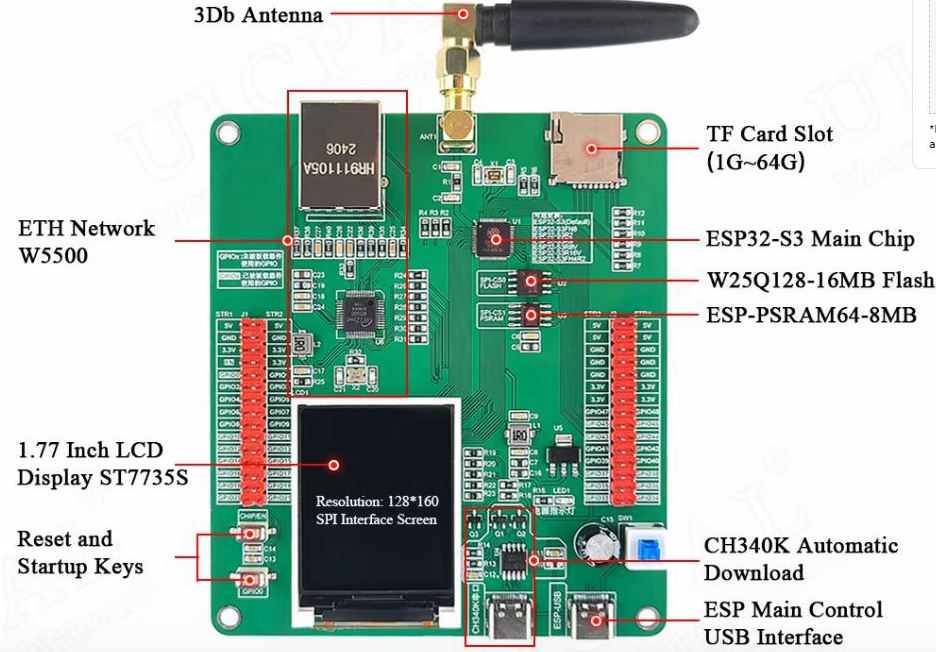
The photo above shows a commercial ESP32-S3 development board with W5500 already integrated on-board, along with a 1.77" LCD (ST7735S), TF card slot, 8MB PSRAM, 16MB Flash, and CH340K USB-UART. This kind of all-in-one board means you can get started without wiring up separate modules.
Hardware
| Component | Role |
|---|---|
| ESP32-S3 | Main MCU. Handles EtherCAT frame parsing and ESC register emulation |
| WIZnet W5500 | SPI Ethernet controller. Receives raw EtherType 0x88A4 frames at the MAC level |
| GPIO (DIN1~3) | 3-channel digital input (pull-up) |
| GPIO (DOUT1~3) | 3-channel digital output |
| UART1 | I/O status exchange interface with external devices |
Pin Assignment
| Function | GPIO |
|---|---|
| W5500 MOSI | 11 |
| W5500 MISO | 13 |
| W5500 CLK | 12 |
| W5500 CS | 10 |
| W5500 INT | 14 |
| W5500 RST | 15 |
| UART1 TX | 17 |
| UART1 RX | 18 |
| DIN1~3 | 1, 2, 4 |
| DOUT1~3 | 5, 6, 7 |
3. The Role of W5500
In this project, the W5500 is more than just an Ethernet interface — it is the physical entry point for all EtherCAT communication.
EtherCAT frames do not use TCP/IP. They are transmitted directly as raw Ethernet frames identified by EtherType 0x88A4. The W5500 receives these raw frames at the MAC level and passes them to the ESP32-S3 over SPI, completely bypassing any conventional network stack.
| Role | Details |
|---|---|
| Raw Frame Reception | Receives EtherCAT frames (EtherType 0x88A4) at the MAC level |
| SPI Interface | Connected to ESP32-S3 via SPI; built-in hardware TCP/IP stack minimizes MCU overhead |
| Response Frame Transmission | Sends processed EtherCAT responses from ESP32-S3 back to the master |
W5500 was chosen because its characteristics match this architecture well: SPI-based connectivity that works with any MCU, support for raw packet transmission and reception, and a stable, widely available supply chain.
4. How It Works
The full processing flow of the system is as follows:
EtherCAT Master (TwinCAT 3)
│ EtherType 0x88A4 raw frame
▼
W5500 (SPI Ethernet)
│ Passes raw frame via SPI
▼
ESP32-S3
├─ EtherCAT datagram parsing
│ (APRD / APWR / FPRD / FPWR / BRD / BWR / LRW)
├─ ESC register space emulation (16KB RAM)
├─ FMMU logical-to-physical address mapping
├─ EEPROM (SII) emulation
└─ SOES stack integration
├─ EtherCAT state machine handling
├─ CoE (CANopen over EtherCAT)
└─ PDO I/O
├─ TxPDO: DIN1~3 → sent to master
└─ RxPDO: DOUT1~3 ← received from master
EtherCAT Object Configuration
| Index | Name | Direction |
|---|---|---|
| 0x6000:01~03 | DIN1, DIN2, DIN3 | TxPDO (Slave → Master) |
| 0x7000:01~03 | DOUT1, DOUT2, DOUT3 | RxPDO (Master → Slave) |
TwinCAT Integration
The repository includes an ESI XML file (ESP32S3_SOES.xml). Copy it to TwinCAT's device description directory, reload device descriptions, and the device will appear as "ESP32S3_SOES_W5500" during a scan. No manual configuration required.
UART1 Interface
The UART1 interface (115200 8N1) allows external devices to simulate digital input states or monitor output status.
- Send
1/2/3→ Toggle DIN1~3 - When TwinCAT changes DOUT values → Receive
DO:xyzformat
5. Tech Stack Summary
| Category | Details |
|---|---|
| Main MCU | ESP32-S3 |
| Ethernet Chip | WIZnet W5500 (SPI, hardware TCP/IP stack built-in) |
| EtherCAT Stack | SOES (Simple Open EtherCAT Slave, GPLv2) |
| Build System | ESP-IDF v5.3.x, CMake |
| ESC Implementation | Software emulation (no dedicated ASIC required) |
| Supported Datagrams | APRD, APWR, FPRD, FPWR, BRD, BWR, LRW |
| CoE Support | Yes (CANopen over EtherCAT) |
| Compatible EtherCAT Masters | TwinCAT 3 and standard EtherCAT masters |
| I/O Configuration | 3x DI, 3x DO + UART1 |
| Language | C (97%), CMake (3%) |
| License | SOES: GPLv2 / Application code: as-is |
6. Expandability
This implementation provides a working EtherCAT slave environment using only an ESP32-S3 and W5500. The ability to validate EtherCAT slave behavior without a dedicated ESC ASIC makes it a practical reference structure for the early stages of developing industrial IoT devices or compact I/O modules.
PDO mappings and CoE objects in the SOES stack can be extended to fit specific project requirements, and the W5500 + MCU combination is straightforward to port to a custom PCB. The minimal part count and stable supply chain also make it well-suited for repeated application across designs.
FAQ
Q. Does it actually communicate with TwinCAT 3 without a dedicated EtherCAT slave chip?
Yes. The repository includes the ESI XML file, and per the README, the device is recognized after a device scan in TwinCAT 3.
Q. Can W5500 be replaced with a different Ethernet chip?
The current codebase is built around W5500's raw packet reception capabilities. Porting to another chip that supports raw frame handling is possible, but would require modifications at the driver level.
Q. Can this architecture be used in a real product?
Software ESC emulation has inherent limitations in real-time performance compared to dedicated ASICs. That said, it is a practical structure for prototyping, education, and non-real-time I/O control applications.
GitHub: https://github.com/egerobotics/ESP32S3_W5500_SOES
https://hackaday.io/project/205376-esp32s3-w5500-ethercat-soes