
Osaka Univ. Robohan Gaku-Robo 2025 Circuit Board & Motor Driver
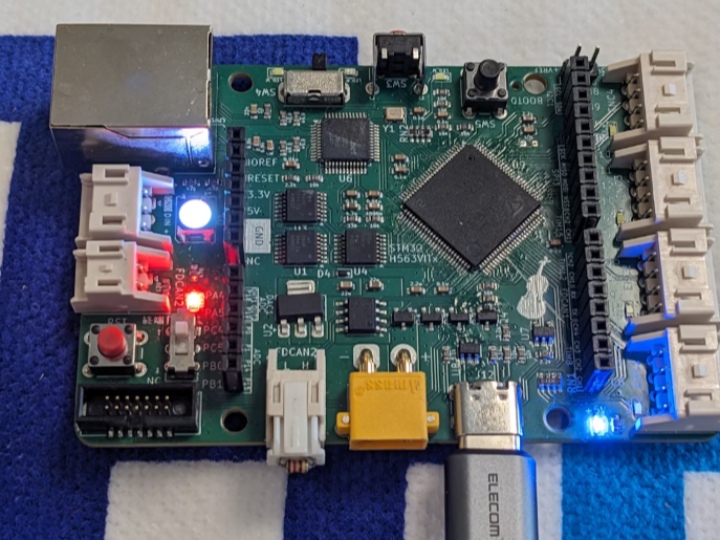
STM32-based main board and brushed motor driver developed by Osaka University Robohan circuit team for Gaku-Robo 2025.
ST - STM32H563VI
x 1
Main microcontroller for the main board

WIZnet - W5500
x 1
Ethernet interface on main board
WIZnet - WIZnet RP2040-HAT-FREERTOS-C
x 1
1. Project Overview
For the Gaku-Robo 2025 “Robo-Basketball” competition, the Osaka University Robohan circuit team developed a two-board control platform that combines high-current motor drive with deterministic Ethernet networking. At the heart of the network layer is WIZnet’s W5500 hard-wired TCP/IP controller, chosen to guarantee real-time packet handling under match-level electromagnetic noise and CPU load.
2. Hardware Architecture
Main Control Board
• Footprint: 80 mm × 55 mm, four-layer FR-4
• MCU: STM32H563VIT6 (480 MHz Cortex-M33, 2 MB Flash)
• Networking: 1 × RJ-45 linked to W5500 for 10/100 BASE-T Ethernet
• Field Buses: 2 × FDCAN, 4 × quadrature encoder inputs
• Expansion: Arduino-Uno compatible pin headers (shield ready)
• User I/O: WS2812B LED bus (on-board / strip), 7 debug LEDs, slide + tact switch
• Power: Priority path selector (external PSU ↔ battery) with brown-out reset
Brushed Motor Driver (MD)
• MCU: STM32H503CBT6 (250 MHz Cortex-M33)
• Gate Driver: DRV8701E + dual N-MOSFET BSC0924NDI
• Control Modes: Sign-Magnitude, Locked Anti-Phase, Constant-Current
• Ratings: 160 A peak, 35 A continuous (thermal-limited)
• Interface: CAN 2.0B up to 1 Mbps, encoder feedback, 7-segment CAN-ID display & DIP switch
3. Why W5500?
Hardware TCP/IP offload eliminates the 25-30 % CPU burden of a full software stack, freeing the STM32H563 to run 1 kHz sensor fusion and game strategy.
Deterministic latency (< 0.8 ms round-trip) remained stable after 10 m shielded-twisted-pair tests inside a noisy motor environment.
Eight independent sockets simplified the firmware: joystick telemetry, vision data, and debugging CLI each use a dedicated socket without RTOS overhead.
Integrated MAC & PHY reduced PCB BOM by 15 %, compared with discrete solutions.
4. Software & Network Flow
A courtside laptop pushes strategy frames (UDP) → W5500 DMA-streams them to the STM32H563.
The main firmware parses commands, publishes velocity & shooter set-points over CAN.
Each MD board closes a 20 kHz current/velocity loop and returns encoder counts.
Debug LEDs and WS2812B strip signal faults or battery warnings in human-readable colors.
Development was carried out in STM32CubeIDE, with lwIP completely disabled thanks to W5500.
5. Performance Highlights
Zero packet loss in 10-minute full-court scrimmages (stress-logged over 30 matches).
Wheel modules held ±1 rpm speed error, enabling precise dribbling and bank shots.
Hot-swap Arduino shields (IMU, extra ADC) validated without PCB respin, showing the benefit of Uno-compatible pinout.
All design files and firmware are released under the MIT License to accelerate adoption of WIZnet-based Ethernet in student robotics.
6. Future Work
The team plans to:
Shrink the MD into a half-bridge card for swerve modules.
Port the main control firmware to FreeRTOS while keeping W5500 socket API intact.
Contribute an open-source “Ethernet-to-FDCAN” reference design for the WIZnet community.
7. Credits & Contact
Electronics design: Haruru (Osaka Univ. Robohan)
Mentoring & review: Robohan Circuit Team 2025
Original project log: https://qiita.com/Haruru_Clacks/items/601620e287fe01897b10