
RTI-ZONE : Observatory dome controller
Observatory dome controller
WIZnet Success Stories: ESP32-based Observatory Dome Control System
ESP32-based Observatory Dome Control System
Overview
This project demonstrates an ESP32-based observatory dome control system designed to automate dome rotation and shutter operation for astronomical observation environments.
The system was developed to control an observatory dome more reliably and conveniently by combining motor control, sensor input, network communication, and firmware-based calibration features. By using ESP32 as the main controller, the system can manage dome movement, communicate with external software, and support remote control functions through a compact embedded platform.
The main objective of the project was to build a practical dome automation controller that can be used in real observatory environments, where stable operation, accurate positioning, and safe shutdown behavior are important.
Background
In astronomical observation, the dome must be aligned with the telescope’s direction so that the telescope has a clear view of the sky. Traditionally, dome movement may require manual operation, but this becomes inconvenient and inefficient for long observation sessions, remote observatories, or automated imaging systems.
A dome control system needs to support several key functions:
- Rotation control for aligning the dome opening with the telescope
- Shutter control for opening and closing the observation slit
- Sensor input for home position, limit detection, and safety events
- Motor driver control for stepper motors or servo systems
- Network or serial communication with observatory control software
- Calibration and homing procedures for different dome sizes
- Reliable operation in outdoor or semi-outdoor environments
For this reason, an embedded controller based on ESP32 was selected to build a compact and flexible dome automation system.
Solution
The dome controller was implemented using ESP32 as the main control unit. The ESP32 manages motor control signals, sensor inputs, communication interfaces, and firmware logic for calibration and homing.
The controller can be connected to a motor driver that accepts standard control signals such as Enable, Direction, and Step. This allows the system to drive a stepper motor or compatible motor driver for dome rotation.
For shutter operation, the system can be expanded with a separate shutter controller or additional motor driver outputs depending on the dome structure. The ESP32-based controller can also process sensor inputs such as home position detection, open/close status, rain detection, or other weather-related safety signals.
Through firmware configuration, the controller can be adapted to different dome sizes, motor drivers, gear ratios, and installation environments.
System Architecture
The system is composed of the following major blocks:
1. ESP32 Main Controller
The ESP32 handles the main firmware operation, including motor control, input monitoring, communication, and dome position management.
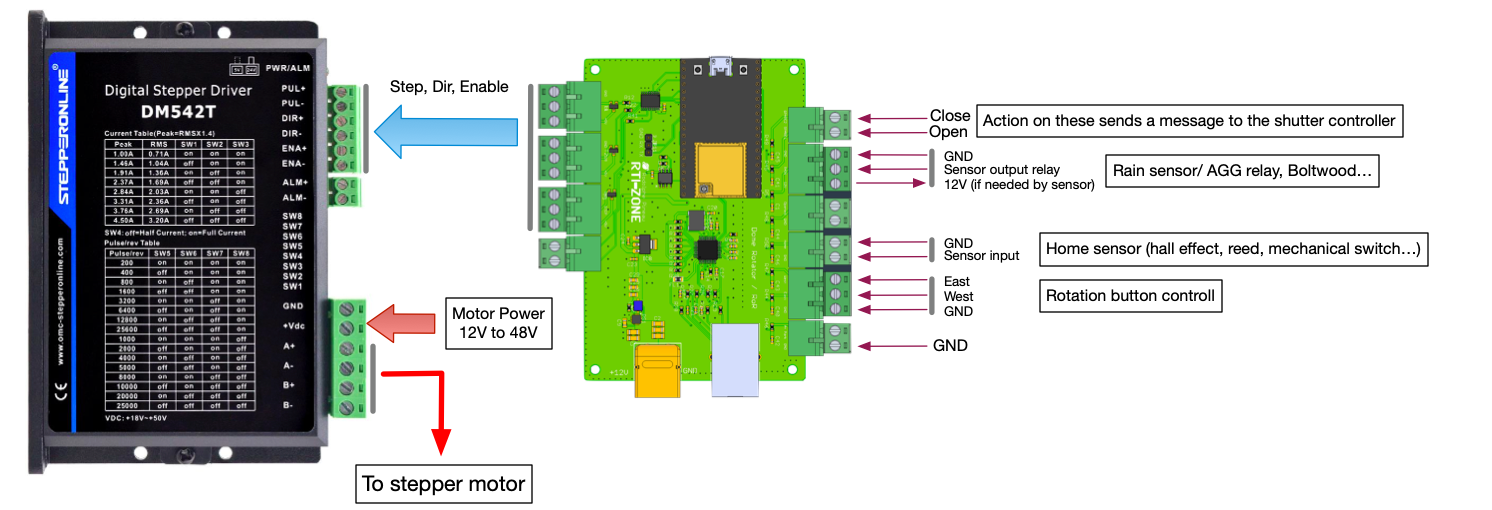
2. Motor Driver Interface
The controller outputs standard motor control signals such as Enable, Direction, and Step. These signals are connected to a stepper motor driver or compatible servo driver.
3. Dome Rotation Mechanism
The motor and gear mechanism rotate the observatory dome. The system can be calibrated according to the dome size, gear ratio, and mechanical structure.
4. Sensor Inputs
The controller receives input from sensors such as:
- Home position sensor
- Limit switches
- Open/close detection sensors
- Rain or weather event sensors
- Manual control buttons
These inputs help the controller perform homing, calibration, and safety-related operations.
5. Network or Serial Communication
The ESP32 can communicate with external software through network or serial communication. This allows the dome controller to receive commands from observatory control software or a remote monitoring system.
6. Firmware Configuration
The firmware includes configuration options for motor direction, enable signal level, calibration values, communication settings, and safety behavior.
Key Features
Dome Rotation Control
The controller can rotate the dome using a stepper motor or compatible motor driver. The firmware generates control signals for accurate movement and positioning.
Shutter Control Support
The system can support shutter open and close control through additional driver outputs or a dedicated shutter controller. This allows the dome slit to be controlled together with the rotation system.
Calibration and Homing
The controller includes calibration and homing functions to adapt the system to different dome sizes and mechanical structures. The home sensor allows the dome to return to a known reference position.
Sensor-based Safety Operation
Sensor inputs can be used to detect weather events, limit positions, or abnormal operating conditions. For example, a rain sensor input can be used to trigger automatic shutdown behavior.
Network Control
Using ESP32’s communication capability, the controller can be connected to a network-based control environment. This enables remote operation and integration with observatory software.
Firmware Upgrade and Configuration
The firmware can be updated and configured according to the user’s installation. Motor driver settings, sensor behavior, and communication options can be adjusted for each observatory environment.
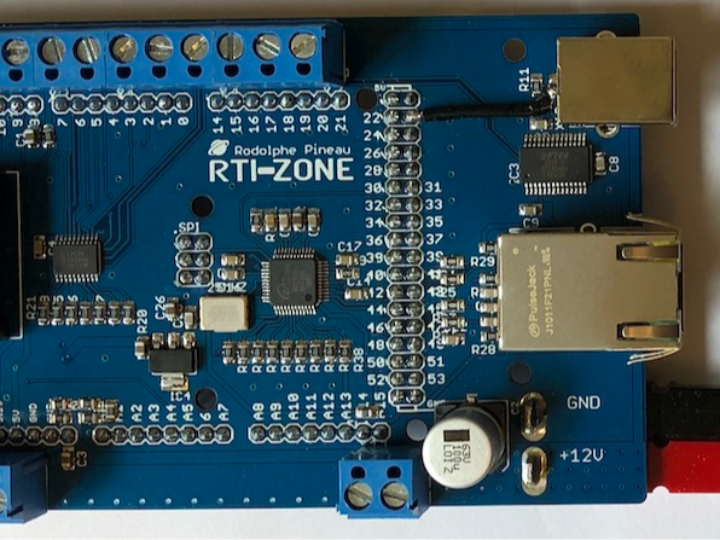
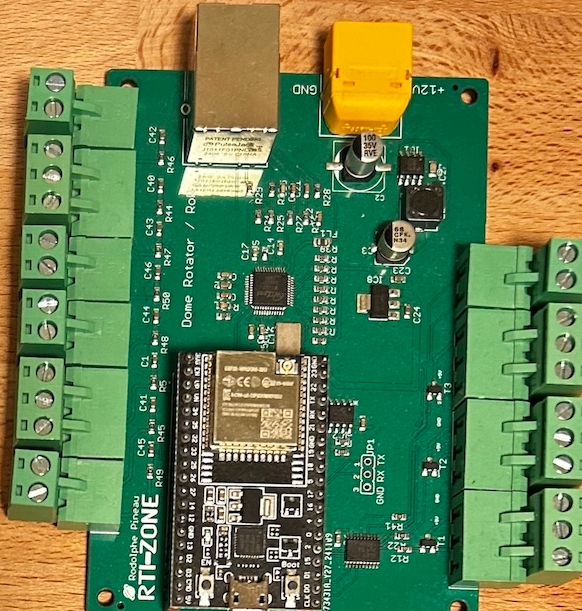
Hardware Configuration
The ESP32-based dome controller hardware includes:
- ESP32 main controller
- Motor driver interface
- Stepper motor or servo driver connection
- Sensor input terminals
- Power input circuit
- Communication interface
- Optional shutter control interface
- Optional weather sensor input
The motor driver should be selected according to the dome size, weight, gear ratio, and required torque. For heavier domes, a motor with sufficient torque and a suitable gearbox should be used to ensure stable rotation.
The power system should also be designed carefully. If the motor requires a higher voltage such as 24V or 48V, the controller power and motor power should be properly separated or regulated to protect the ESP32 and peripheral circuits.
Firmware Operation
The firmware manages dome operation through several main routines:
Command Processing
The controller receives commands from external software or a user interface and converts them into motor control actions.
Motor Control
The firmware controls the motor driver using Enable, Direction, and Step signals. The enable signal level can be configured depending on the motor driver requirements.
Homing Procedure
When the home command is executed, the dome rotates until the home sensor is detected. This allows the controller to establish a reference position.
Position Tracking
After calibration, the controller can track the dome position based on motor movement and predefined mechanical parameters.
Sensor Monitoring
Sensor inputs are monitored to detect limit conditions, weather events, or manual control signals. These inputs can be used to stop movement or close the dome when necessary.
Settings Storage
Configuration values such as calibration data, motor settings, and communication parameters can be stored in non-volatile memory so that they remain available after power cycling.
Benefits
The ESP32-based observatory dome controller provides several advantages:
- Automated dome rotation
The dome can be moved automatically according to control commands, reducing manual operation. - Flexible motor driver support
The controller can work with motor drivers that use standard Enable, Direction, and Step signals. - Adaptable to different dome sizes
Calibration parameters allow the system to be adjusted for different dome diameters and mechanical structures. - Remote control capability
Network or serial communication enables integration with observatory control software. - Improved safety
Sensor inputs can be used for home detection, limit detection, rain detection, or emergency shutdown behavior. - Compact embedded design
ESP32 provides control, communication, and firmware flexibility in a small embedded platform. - Cost-effective implementation
The system can be built with commonly available embedded components and motor drivers.
Conclusion
This ESP32-based observatory dome control system shows how an embedded controller can be used to automate dome rotation and shutter operation in astronomical observation environments.
By combining motor driver control, sensor monitoring, calibration logic, and communication functions, the system provides a practical solution for observatory automation. The ESP32 enables a compact and flexible controller design that can be adapted to different dome structures, motor systems, and installation requirements.
For users who want to automate their observatory dome, this type of controller can reduce manual operation, improve remote observation capability, and provide safer operation through sensor-based control and firmware-managed behavior.