
W5500 pico coap server
This project includes examples of coap server using RP2040.
COMPONENTS
Hardware components

WIZnet - W5500-EVB-Pico
x 1
PROJECT DESCRIPTION


This project uses w5500-evb-pico as a coap server and work with the client.
Project
Integrate microcoap library to RP2040-HAT-C project.
link : https://github.com/1248/microcoap
Library Folder
Example Folder
#endpoints.c
Create a handler function based on the message received from the client and then register it in the structure called endpoint.
# coapServer.c
Create a function called coapServer_run() to act as UDP.
void coapServer_run()
{
int32_t ret, n;
coap_packet_t pkt;
uint16_t size = 0, sentsize=0;
uint8_t scratch_raw[DATA_BUF_SIZE];
coap_rw_buffer_t scratch_buf = {scratch_raw, sizeof(scratch_raw)};
uint8_t destip[4];
uint16_t destport;
switch(getSn_SR(COAPSock_Num))
{
case SOCK_UDP :
if((size = getSn_RX_RSR(COAPSock_Num)) > 0)
{
if(size > DATA_BUF_SIZE)
size = DATA_BUF_SIZE;
ret = recvfrom(COAPSock_Num, pCOAP_RX, size, destip, (uint16_t*)&destport);
#ifdef DEBUG
printf("Receive: ");
coap_dump(buf, ret, true);
printf("\n");
#endif
if (0 != (ret = coap_parse(&pkt, pCOAP_RX, ret)))
printf("Bad packet rc=%d\n", ret);
else
{
size_t rsplen = DATA_BUF_SIZE * sizeof(uint8_t);
coap_packet_t rsppkt;
#ifdef DEBUG
coap_dumpPacket(&pkt);
#endif
coap_handle_req(&scratch_buf, &pkt, &rsppkt);
if (0 != (ret = coap_build(pCOAP_TX, &rsplen, &rsppkt)))
printf("coap_build failed rc=%d\n", ret);
else
{
#ifdef DEBUG
printf("Sending: ");
coap_dump(buf, rsplen, true);
printf("\n");
#endif
#ifdef DEBUG
coap_dumpPacket(&rsppkt);
#endif
ret = sendto(COAPSock_Num, pCOAP_TX, rsplen, destip, destport);
}
}
}
break;
case SOCK_CLOSED:
if(socket(COAPSock_Num, Sn_MR_UDP, COAP_SERVER_PORT, 0x00) == COAPSock_Num)
{
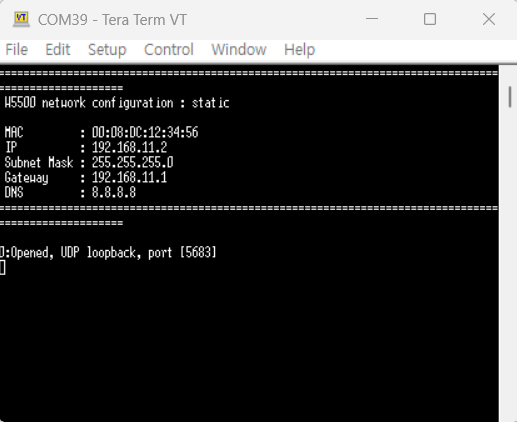
printf("%d:Opened, UDP loopback, port [%d]\r\n", COAPSock_Num, COAP_SERVER_PORT);
}
break;
default :
break;
}
}How to use
Download libcoap
lilnk : https://github.com/obgm/libcoap
$ git clone https://github.com/obgm/libcoap.git
$ cd libcoap
$ git checkout main
$ cmake -E remove_directory build
$ cmake -E make_directory build
$ cd build
$ cmake .. -DENABLE_TESTS=ON
$ cmake --build .
$ cd Debug
Load program to Pico Board
Put message / Get message
light on

light off

Documents
Comments
Write