
RoboBoat : SimLE SeaSentinel Team ASV
It is a project that developed an autonomous unmanned surface vessel (ASV) platform designed to efficiently patrol and monitor coastal waters.

WIZnet - W5500-EVB-Pico
x 1
📌Overview


SeaSentinel is a project launched in November 2021 by SimLE, a student scientific club at Gdańsk University of Technology in Poland, with the goal of developing an autonomous surface vehicle (ASV) platform for efficient coastal patrol and surveillance.
📌Background
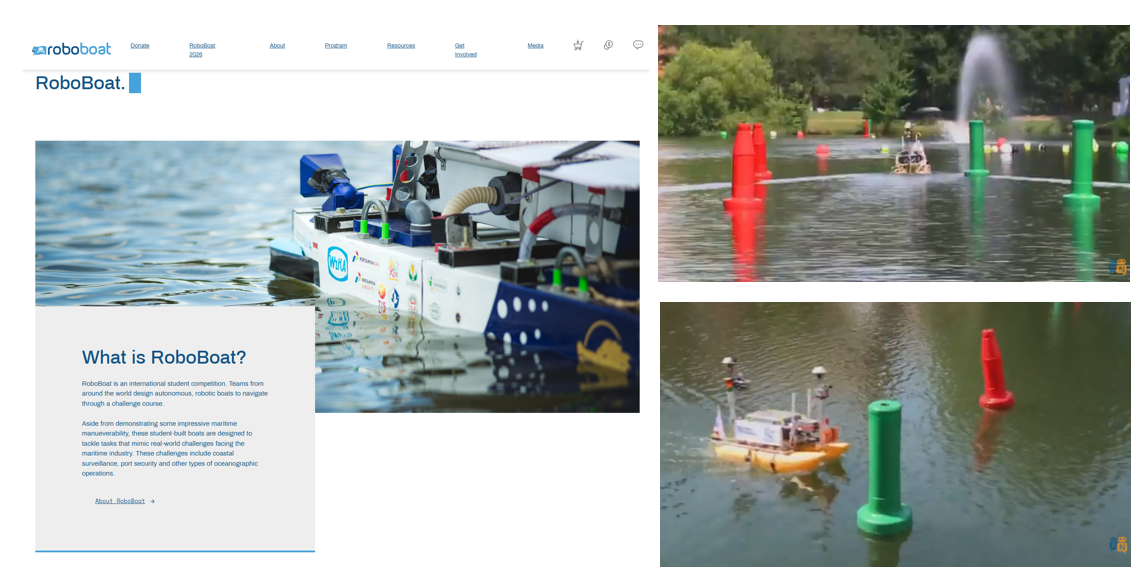
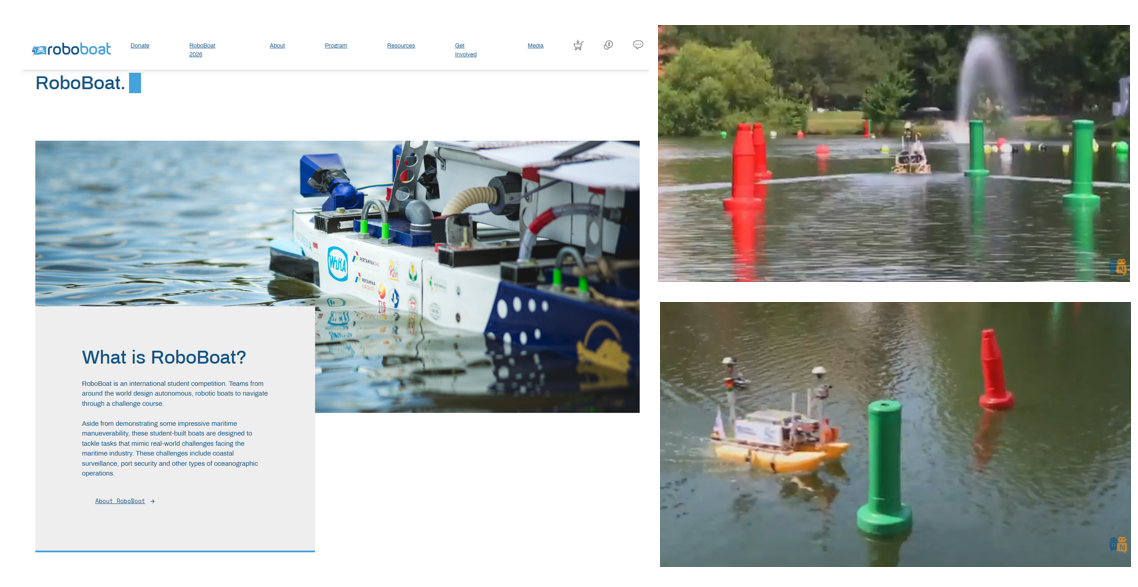
RoboBoat (https://roboboat.org/)
Source : https://youtu.be/OIVBayCQBm8?si=JKZx0NEGBqjA0qTC
RoboBoat is an international competition in which students design and build autonomous surface vehicles (ASVs) to compete. Organized by RoboNation, it primarily involves high school, undergraduate, and graduate students.
RoboNation (https://robonation.org/)
RoboNation is a nonprofit organization founded by the AUVSI Foundation that runs education programs and innovation-driven robotics competitions with the goal of strengthening students’ robotics and engineering skills.
Source : https://zrzutka.pl/s93z9g?utm_medium=mail&utm_source=postmark&utm_campaign=payment_notification
The project was founded by Igor Rusiecki, who began developing the idea while he was still a high school student and later continued to advance the project together with the SimLE team.
📌Features
- Fully autonomous surface navigation
- GPS, IMU, and camera-based navigation
- Mission-driven autonomous behavior execution
- Advanced perception system
- Stereo cameras (OAK-D series)
- YOLO-based object detection and target classification
- Precise propulsion and attitude control
- Omnidirectional movement using multiple thrusters
- Station keeping and precise rotational control
- ROS 2–based software architecture
- Clear separation of sensing, control, and perception modules
- Shared codebase between simulation and real vehicles
📌System Architecture
🚤 Autonomous Surface Vehicle (ASV)
The ASV is the core operational element of the SeaSentinel project.
- Independently collects its own state (position, attitude, speed) and surrounding environmental information while operating on the water
- Performs autonomous decision-making based on sensor data from cameras, GPS, IMU, and other sources
- Executes tasks on a mission-by-mission basis using Behavior Trees
- Capable of navigation, obstacle avoidance, docking, and mission execution without external intervention
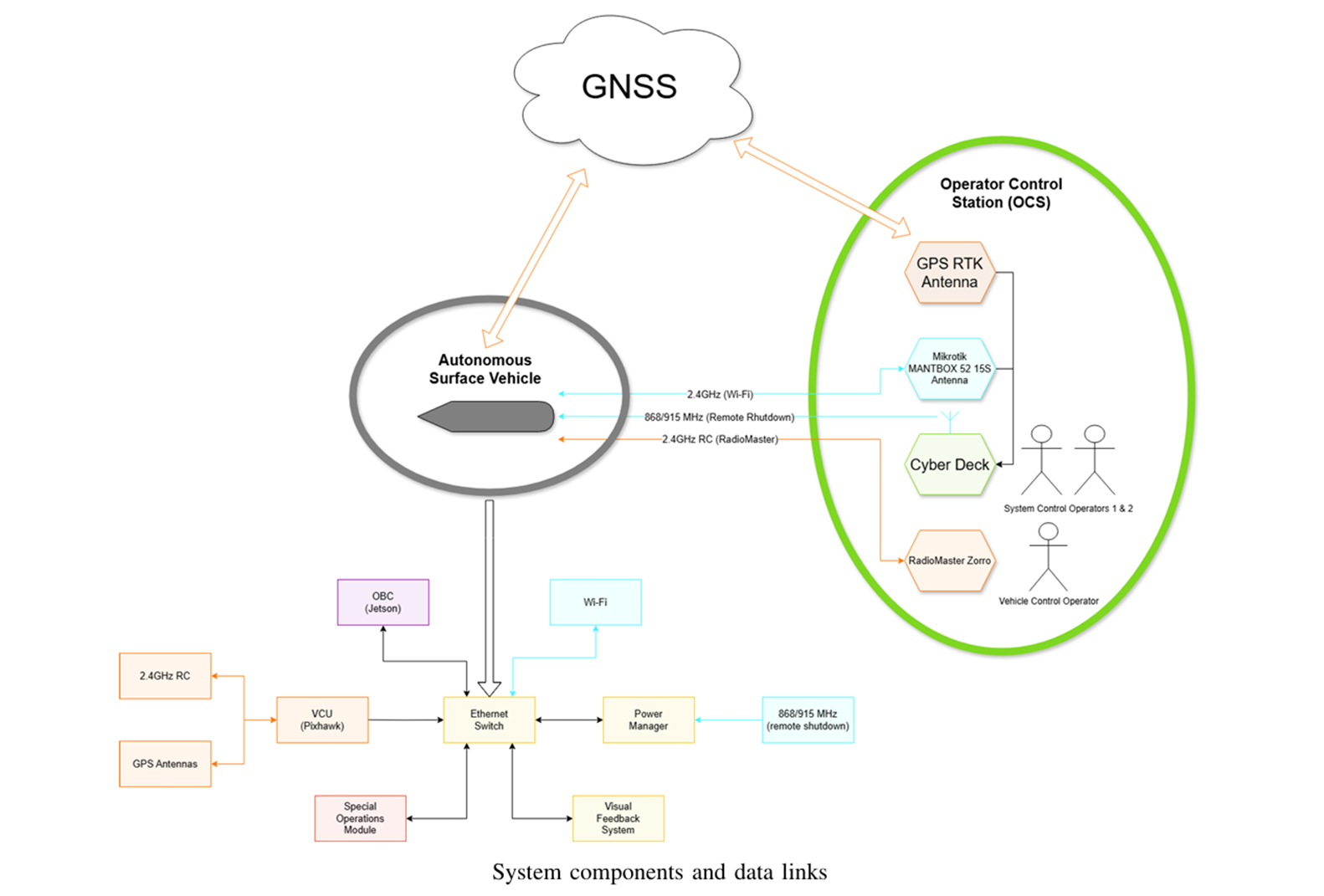
| Visual Feedback System | OAK-D LR | Uses cameras to detect buoys, docks, and other boats, and provides distance and positional information to the OBC. |
| OBC (On-Board Computer) | Jetson | Based on camera perception results and vehicle state, the OBC decides the next actions and sends corresponding commands to the VCU and SOM. |
| VCU (Vehicle Control Unit) | Pixhawk 5X | Receives commands from the OBC and controls the thrusters to physically maneuver the vessel while maintaining stable attitude control. |
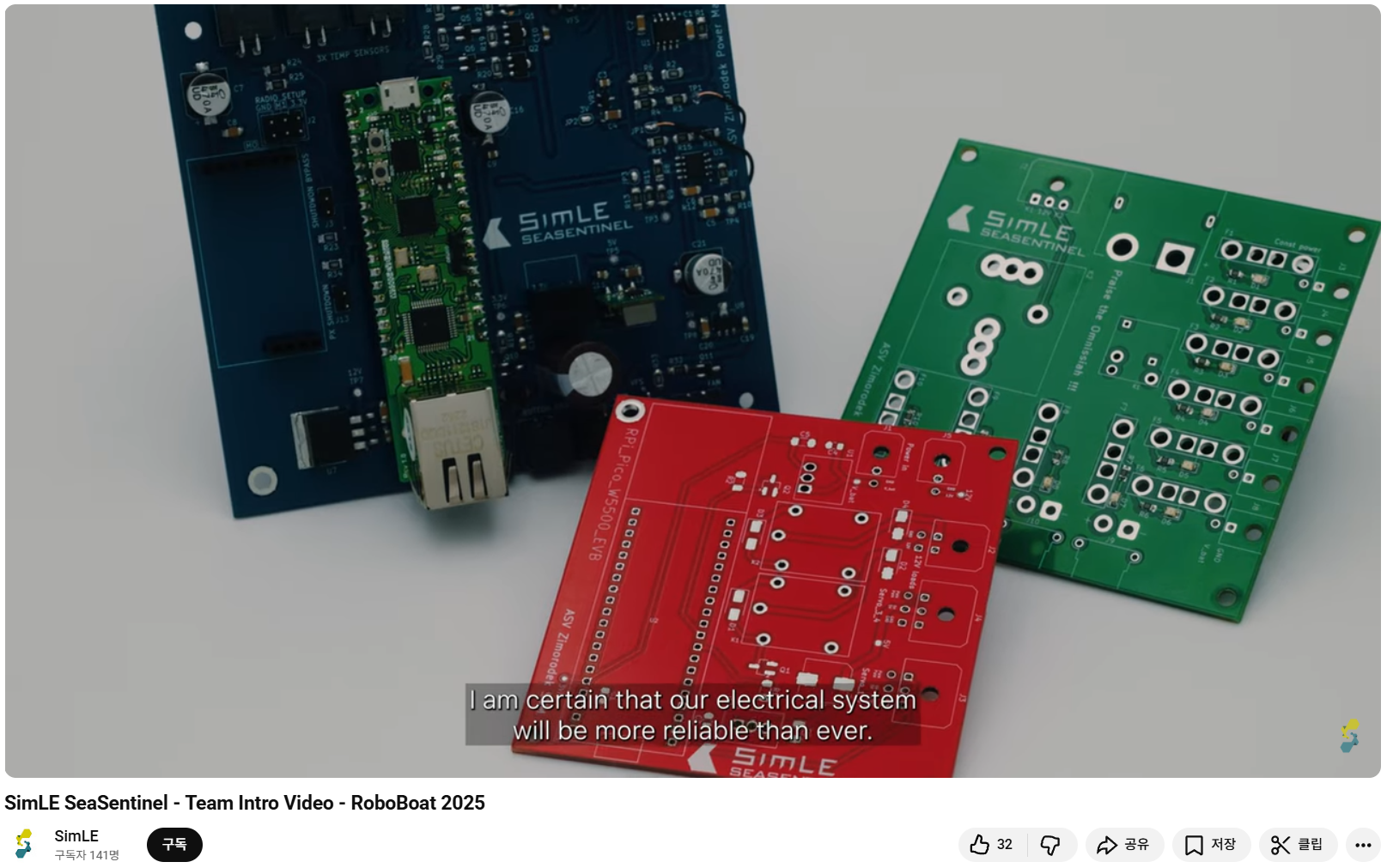
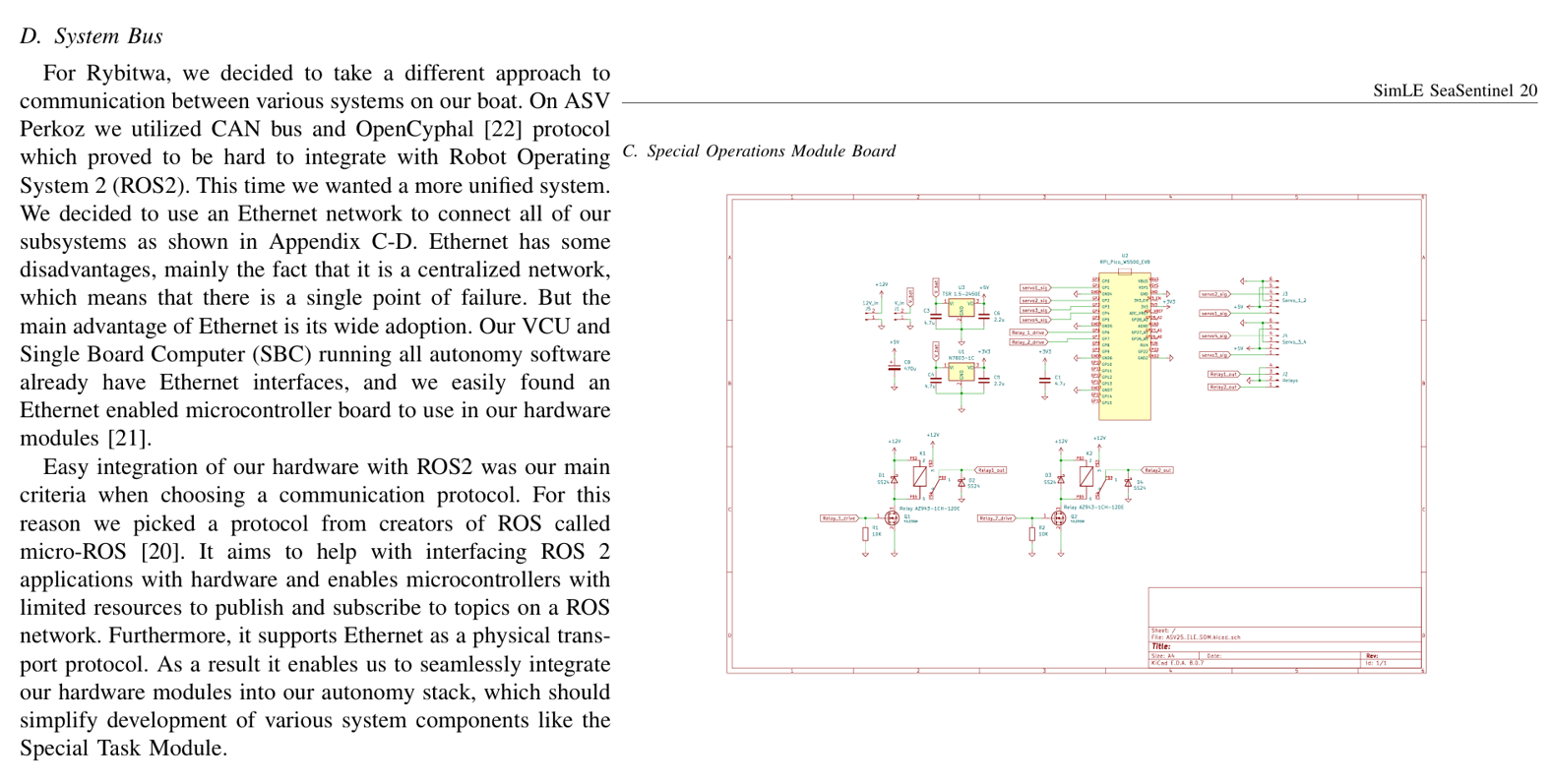
| Special Operations Module (SOM) | W5500-EVB-Pico | Executes non-navigation mission actions such as operating a water cannon or delivering objects. It performs only predefined actions according to instructions from the OBC. |
🖥 Ground Segment (GS)
The Ground Segment includes all support elements that remain on land while the ASV operates on the water.
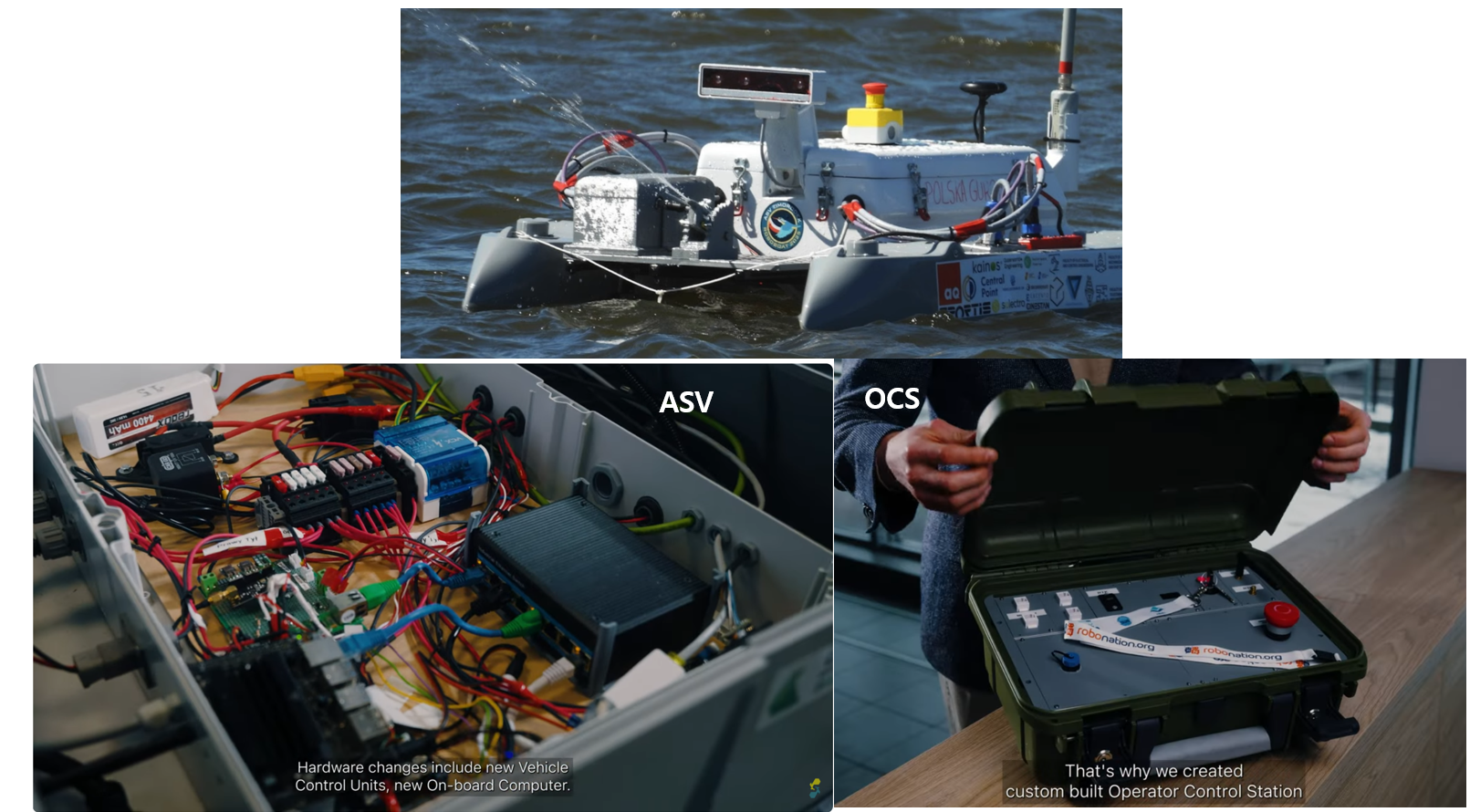
- Operator Control Station (OCS)
- A portable control and monitoring station installed inside the competition tent.
- Transport & Support Equipment (Cart & Crates)
- Safely transports the ASV to the launch site
- Provides logistical support for batteries, spare parts, and operational equipment
📌System Flow
The project aims to complete the following tasks included in the Autonomy Challenge at RoboBoat 2025:
- Task 1: Navigation Channel
- Recognize a gate formed by two large markers and pass through it by following a sequence of waypoints.
- Task 2: Mapping Migration Patterns
- Navigate along green and red buoys while identifying yellow buoys as obstacles and generating an avoidance path.
- Task 3: Treacherous Waters (Docking)
- Detect the docking area, select an appropriate entry point, enter the dock, come to a stop, and then exit and return.
- Task 4: Race Against Pollution (Speed Challenge)
- Starting from the launch zone, detect blue buoys and LED signals to execute a high-speed route, then return to the starting point.
- Task 5: Rescue Deliveries
- A structured single mission in which the ASV navigates to a predefined target location and performs an action such as dropping a ball or spraying water.
- Task 6: Return to Home
- Use a black buoy as a reference point to generate the final waypoint and return to the original launch position.
📌Role and Application of the W5500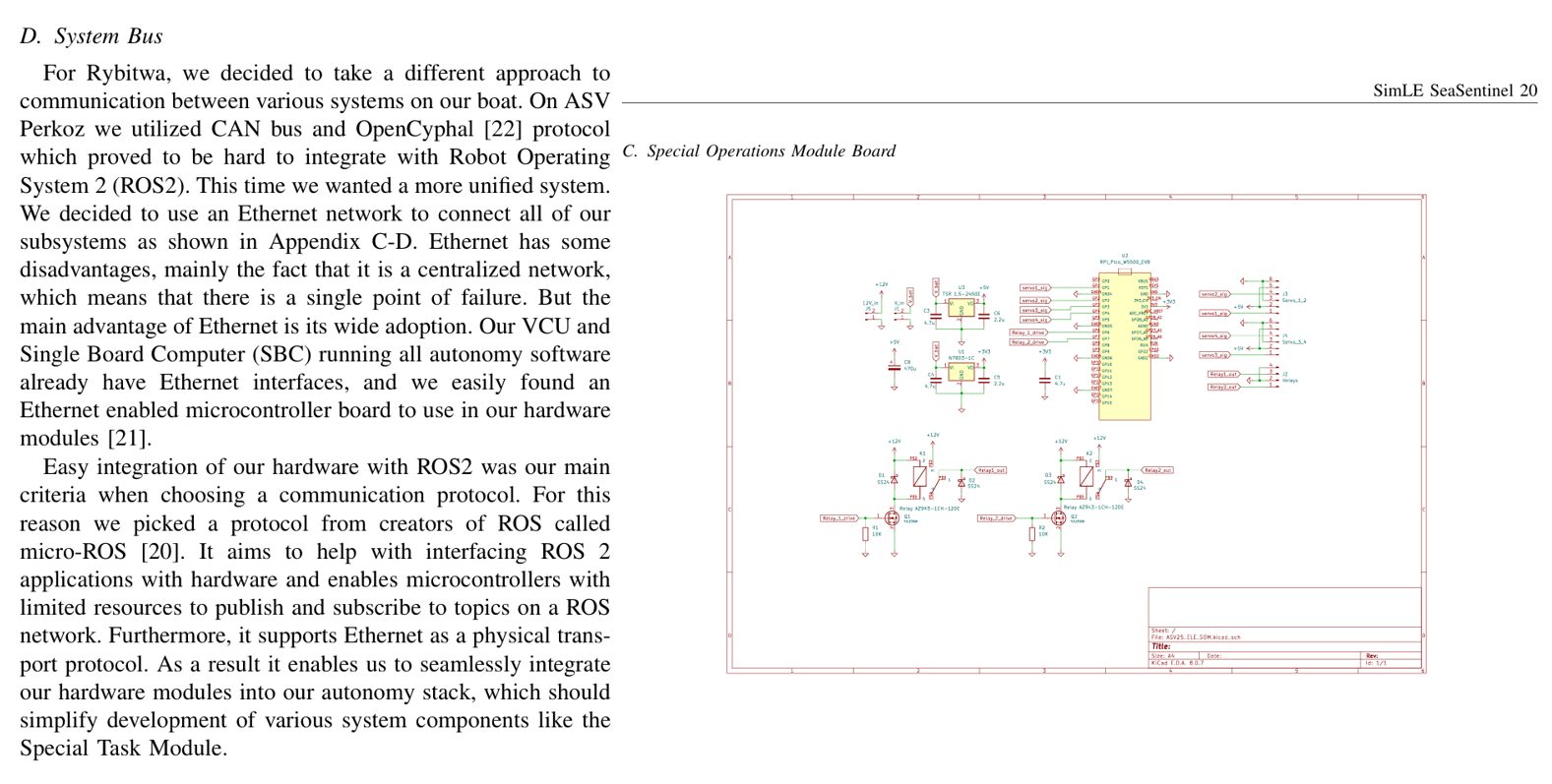
The communication architecture of the SeaSentinel project has evolved step by step through several years of ASV development experience.
- ASV Perkoz (2023)
A distributed control architecture was implemented using the CAN bus and the OpenCyphal protocol. However, the team encountered limitations such as complex integration with ROS 2 and difficulty in expanding hardware modules. - ASV Rybitwa (2024)
To address these issues, the communication structure was completely re-evaluated, and an Ethernet-based system bus was adopted with seamless integration into ROS 2 as the top priority. The fact that both the VCU (Pixhawk) and the onboard SBC already support Ethernet was also a key factor in this decision. - ASV Zimorodek (2025)
Building on the Ethernet-centric architecture, the system was further refined to integrate sensors, special task modules, and control boards into a single unified ROS 2 network.
Starting with ASV Rybitwa, the W5500-EVB-Pico was adopted as a key component for connecting hardware modules to the system.
- Adds Ethernet capability to MCUs via SPI
- Minimizes MCU load through hardware TCP/IP offloading
- Directly compatible with the Ethernet transport layer of micro-ROS
- Enables even resource-constrained MCUs to publish and subscribe to ROS 2 topics
📌Market & Application Value
The ASV Zimorodek project was developed with the RoboBoat 2025 competition as its immediate goal, but its design structure and technology choices are significant in that they clearly target real-world market applications as an autonomous surface robot platform.
The system adopts a modular architecture (Special Operations Module), allowing mission-specific equipment to be swapped as needed. This provides a flexible ASV platform that can be extended to a wide range of marine and robotics applications, including environmental monitoring, port inspection, and education and research testbeds.
By using a ROS 2–based software architecture and an Ethernet-centric communication structure, the platform forms an open ecosystem that avoids dependency on specific vendors. This reduces development and maintenance costs while enabling immediate use of existing robotics expertise.
As a result, this project goes beyond a competition-focused robot and demonstrates strong market potential and application value as a next-generation autonomous surface vehicle platform suitable for research, education, and industrial use.
📌Reference Link
SimLE Team (https://simle.pl/seasentinel/)
Research 2024
https://robonation.org/app/uploads/sites/3/2024/01/SeSe_TDR_RB24-4.pdf
Research 2025
https://robonation.org/app/uploads/sites/3/2025/02/TDR_SeaSentinel_RB2025.pdf
📌External Indicators
https://www.instagram.com/simle.pg/?utm_source=ig_web_button_share_sheet&igsh=ZDNlZDc0MzIxNw%3D%3D#
Youtube (2024)
Youtube (2025)
📌WIZnet Strategic Value
📌Summary
SeaSentinel is a highly mature autonomous surface robot project developed for the RoboBoat competition.
Its architecture—combining ROS 2, vision-based perception, precise control, and an Ethernet-based network—provides a very practical reference for designing autonomous marine robots.
From WIZnet’s perspective, it represents a meaningful UCC that demonstrates the applicability of the W5500 Ethernet solution in the autonomous robotics domain.
📌Overview
SeaSentinel은 폴란드 그단스크 공과대학의 학생 과학 동아리 SimLE가 2021년 11월에 시작한 프로젝트로, 해안 수역을 효율적으로 순찰·감시하기 위한 자율 무인 수상정(ASV) 플랫폼을 개발하는 것을 목표로 한다.
현재까지 총 3대의 차량을 개발했으며, 미국 플로리다주 사라소타에서 개최된 국제 RoboBoat 대회에서 아래와 같은 수상 실적을 보유하고 있습니다.
- ASV Perkoz: RoboBoat 2023 (9등)
- ASV Rybitwa: RoboBoat 2024 (7등)
- ASV Zimorodek: RoboBoat 2025 (8등)
📌Background
RoboBoat (https://roboboat.org/)
Source : https://youtu.be/OIVBayCQBm8?si=JKZx0NEGBqjA0qTC
RoboBoat은 학생들이 **자율 무인 수상선(ASV)**을 설계‧제작하여 경쟁하는 국제 대회다. RoboNation이 주관하며 고등학교, 대학(학부와 대학원) 학생들이 주로 참여한다.
RoboNation (https://robonation.org/)
RoboNation은 AUVSI 재단에서 설립한 비영리 단체로, 학생들의 로봇 기술 역량 강화를 목표로 교육 프로그램과 혁신 중심의 로봇 대회를 운영한다.
출처 : https://zrzutka.pl/s93z9g?utm_medium=mail&utm_source=postmark&utm_campaign=payment_notification
프로젝트 창시자는 Igor Rusiecki로, 고등학생 시절부터 이 아이디어를 개발했으며 이후 SimLE 팀과 함께 프로젝트를 발전시켰다
📌Features
- 완전 자율 수상 주행
- GPS, IMU, 카메라 기반 항법
- 미션 기반 자율 행동 수행
- 고급 인식 시스템
- 스테레오 카메라(OAK-D 계열)
- YOLO 기반 객체 인식 및 표적 판별
- 정밀 추진 및 자세 제어
- 다중 Thruster 기반 전방향 이동
- Station Keeping 및 정밀 회전 제어
- ROS 2 기반 소프트웨어 구조
- 센서·제어·인지 모듈 분리
- 시뮬레이션과 실제 기체 간 코드 공유
📌System Architecture
SeaSentinel 시스템은 자율 수상정(ASV) 과 지상 시스템(Ground Segment) 으로 구성된 이중 구조를 갖는다.
🚤 자율 수상정 (ASV: Autonomous Surface Vehicle)
ASV는 SeaSentinel 프로젝트의 핵심 운용 요소다.
- 수상 환경에서 자신의 상태(위치, 자세, 속도) 와 주변 환경 정보를 독립적으로 수집
- 카메라, GPS, IMU 등 센서 데이터를 기반으로 자율 의사결정 수행
- 행동 트리(Behavior Tree)를 이용해 미션 단위로 태스크를 실행
- 외부 개입 없이 항해, 회피, 도킹, 임무 수행 가능
| Visual Feedback System | OAK-D LR | 카메라를 통해 부표, 도크, 보트 등을 인식하고 거리·위치 정보를 OBC에 전달한다. |
| OBC (On-Board Computer) | Jetson | 카메라 인식 결과와 차량 상태를 바탕으로 다음에 무엇을 할지 결정하고, 그 명령을 VCU와 SOM에 전달한다. |
| VCU (Vehicle Control Unit) | Pixhawk 5X | OBC의 명령을 받아 추진기를 제어하여 배를 실제로 움직이고 자세를 안정적으로 유지한다. |
| Special Operations Module (SOM) | W5500-EVB-Pico | 물대포나 물체 전달처럼 항해 외의 미션 동작을 수행하며, OBC의 지시에 따라 정해진 동작만 실행한다. |
🖥 지상 시스템 (Ground Segment, GS)
지상 시스템은 ASV가 수상에서 운용되는 동안 육상에 남아 있는 모든 지원 요소를 포함한다.
- 운영자 제어 스테이션 (OCS)
- 대회 텐트 내에 설치되는 이동형 제어·모니터링 스테이션이다.
- 운송 및 지원 장비 (Cart & Crates)
- ASV를 진수 지점까지 안전하게 운반
- 배터리, 예비 부품, 운영 장비 등 물류 지원
📌System Flow
- Task 1: Navigation Channel
- 두 개의 큰 마커로 형성된 게이트를 인식하고, 연속된 웨이포인트를 따라 통과한다.
- Task 2 : Mapping Migration Patterns
- 녹색·적색 부표를 따라 이동하며 노란 부표를 장애물로 인식해 회피 경로를 생성한다.
- Task 3 : Treacherous Waters (Docking)
- 도크 주변을 인식해 적절한 위치를 선택한 뒤 내부로 진입·정지 후 복귀한다.
- Task 4 : Race Against Pollution (Speed Challenge)
- 시작 구역을 기준으로 파란 부표와 LED 신호를 인식해 고속 경로를 실행하고 원점으로 돌아온다.
- Task 5 : Rescue Deliveries
- 저장된 목표 위치로 이동해 공 투하 또는 물 분사를 수행하는 구조화된 단일 미션이다.
- Task 6 : Return to Home
- 검은 부표를 기준점으로 삼아 최종 웨이포인트를 생성하고 출발 지점으로 복귀한다.
📌Role and Application of the W5500
SeaSentinel 프로젝트의 통신 아키텍처는 연도별 ASV 개발 경험을 통해 단계적으로 진화해 왔다.
- ASV Perkoz (2023)
CAN bus와 OpenCyphal 프로토콜을 사용해 분산 제어 구조를 구현했으나, ROS 2와의 통합이 복잡하고 하드웨어 모듈 확장이 어렵다는 한계를 경험했다. - ASV Rybitwa (2024)
이러한 한계를 개선하기 위해 통신 구조를 전면 재검토했고, ROS 2와의 자연스러운 연계를 최우선 목표로 Ethernet 기반 시스템 버스를 채택했다.
VCU(Pixhawk)와 온보드 SBC가 이미 Ethernet을 지원한다는 점도 중요한 결정 요인이었다. - ASV Zimorodek (2025)
Ethernet 중심 아키텍처를 한 단계 더 발전시켜, 센서·특수 태스크 모듈·제어 보드를 하나의 ROS 2 네트워크로 통합하는 구조를 완성했다.
이 과정에서 ASV Rybitwa를 기점으로 W5500-EVB-Pico 는 하드웨어 모듈을 시스템에 연결하는 핵심 구성 요소로 활용되었다.
- SPI 기반으로 MCU에 Ethernet 기능 추가
- 하드웨어 TCP/IP 오프로딩으로 MCU 부하 최소화
- micro-ROS의 Ethernet 전송 계층과 직접 호환
- 제한된 리소스의 MCU도 ROS 2 Topic 발행·구독 가능
📌Market & Application Value
ASV Zimorodek 프로젝트는 RoboBoat 2025 대회를 목표로 개발되었지만, 그 설계 구조와 기술 선택은 실제 시장 적용을 염두에 둔 자율 수상 로봇 플랫폼이라는 점에서 의미가 크다.
본 시스템은 **모듈형 구조(Special Operations Module)**를 채택하여 임무에 따라 장비를 교체할 수 있는 유연한 ASV 플랫폼을 제공한다.
이는 환경 모니터링, 항만 점검, 교육·연구용 실증 플랫폼 등 다양한 해양·로봇 응용 분야로 확장이 가능하다.
또한 ROS2 기반 소프트웨어 아키텍처와 Ethernet 통신 구조를 사용함으로써, 특정 벤더에 종속되지 않는 개방형 생태계를 구성하였다.
이는 개발·유지보수 비용을 낮추고, 기존 로봇 개발 인력을 즉시 활용할 수 있다는 장점을 가진다.
결과적으로 본 프로젝트는 단순한 대회용 로봇을 넘어, 연구·교육·산업 현장에서 활용 가능한 차세대 자율 수상 로봇 플랫폼으로서의 시장성과 응용 가치를 갖는다.
📌Reference Link
SimLE Team (https://simle.pl/seasentinel/)
Research 2024
https://robonation.org/app/uploads/sites/3/2024/01/SeSe_TDR_RB24-4.pdf
Research 2025
https://robonation.org/app/uploads/sites/3/2025/02/TDR_SeaSentinel_RB2025.pdf
📌External Indicators
https://www.instagram.com/simle.pg/?utm_source=ig_web_button_share_sheet&igsh=ZDNlZDc0MzIxNw%3D%3D#
Youtube (2024)
Youtube (2025)
📌WIZnet Strategic Value
SeaSentinel은 Ethernet 중심 자율 로봇 아키텍처의 실제 사례다. WIZnet의 W5500은 다음과 같은 전략적 가치로 연결될 수 있다.
- 자율 로봇·해양 로봇 분야에서 안정적 유선 네트워크 레퍼런스
- ROS 기반 시스템에서 MCU-레벨 Ethernet 적용 사례 제시
- Wi-Fi 중심 구조의 한계를 보완하는 산업·연구용 네트워크 솔루션
- 교육·대회용 로봇을 통한 차세대 엔지니어 대상 기술 노출
📌Summary
SeaSentinel은 RoboBoat 대회를 목표로 개발된 완성도 높은 자율 수상 로봇 프로젝트다.
ROS2, 비전 인식, 정밀 제어, Ethernet 기반 네트워크를 결합한 구조는 자율 해양 로봇을 설계하는 데 있어 매우 실용적인 레퍼런스를 제공한다.
WIZnet 관점에서는 자율 로봇 분야에서 W5500 Ethernet의 활용 가능성을 보여주는 의미 있는 UCC다.