
Miniature Underwater Robot
.

WIZnet - W5500
x 1
Research : https://www.sciencedirect.com/science/article/pii/S2468067225000938
📌Overview
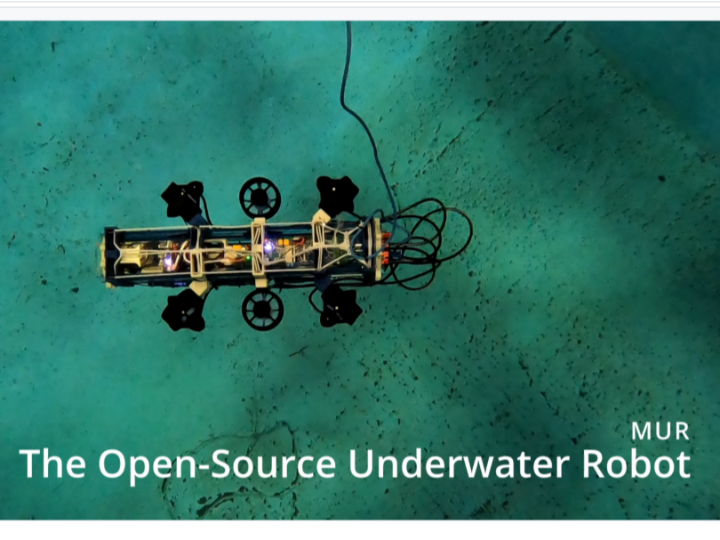
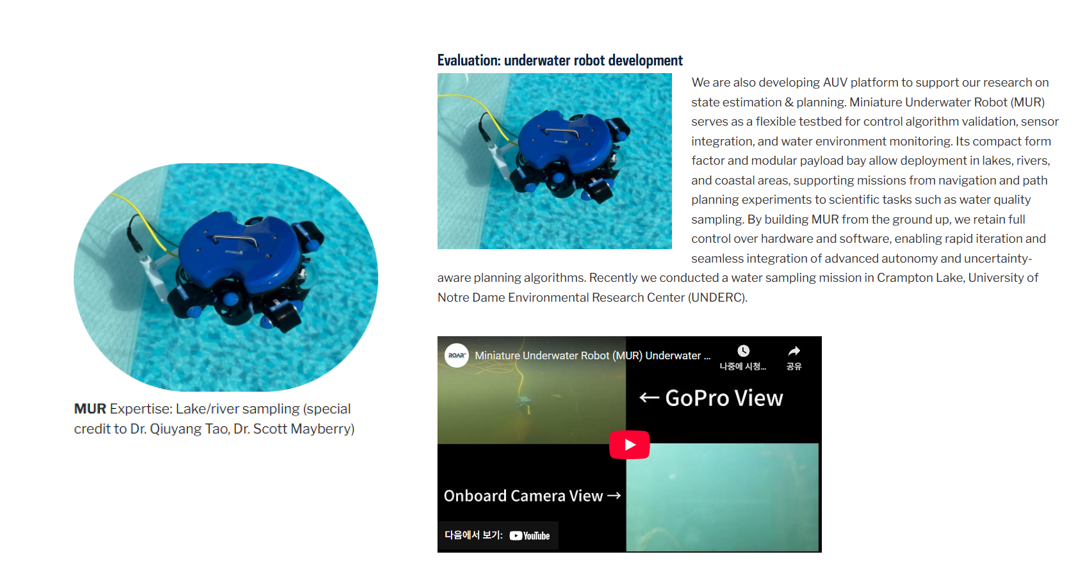
MUR (Miniature Underwater Robot) is an open-source small underwater robot platform designed for underwater exploration, environmental monitoring, and robotics research.
Traditional underwater experiments and exploration face several challenges:
- Equipment is expensive
- Operation and development require specialized expertise
- Proper facilities (test tanks, underwater testing sites, etc.) are often necessary
As a result, small research labs, educational groups, and hobbyist communities have difficulty participating.
To lower this barrier, the project makes both its hardware and software open source and adopts a ROS-based network architecture.
Its core goal is to enable researchers, educators, and makers to conduct real underwater robotics experiments at low cost.
📌Features
- Precision control: 5-DOF thrust system supporting position and attitude control as well as path following
- Sensing: Built-in IMU, pressure, temperature/humidity, and leak detection sensors, plus optional expansion with GPS and environmental sensors
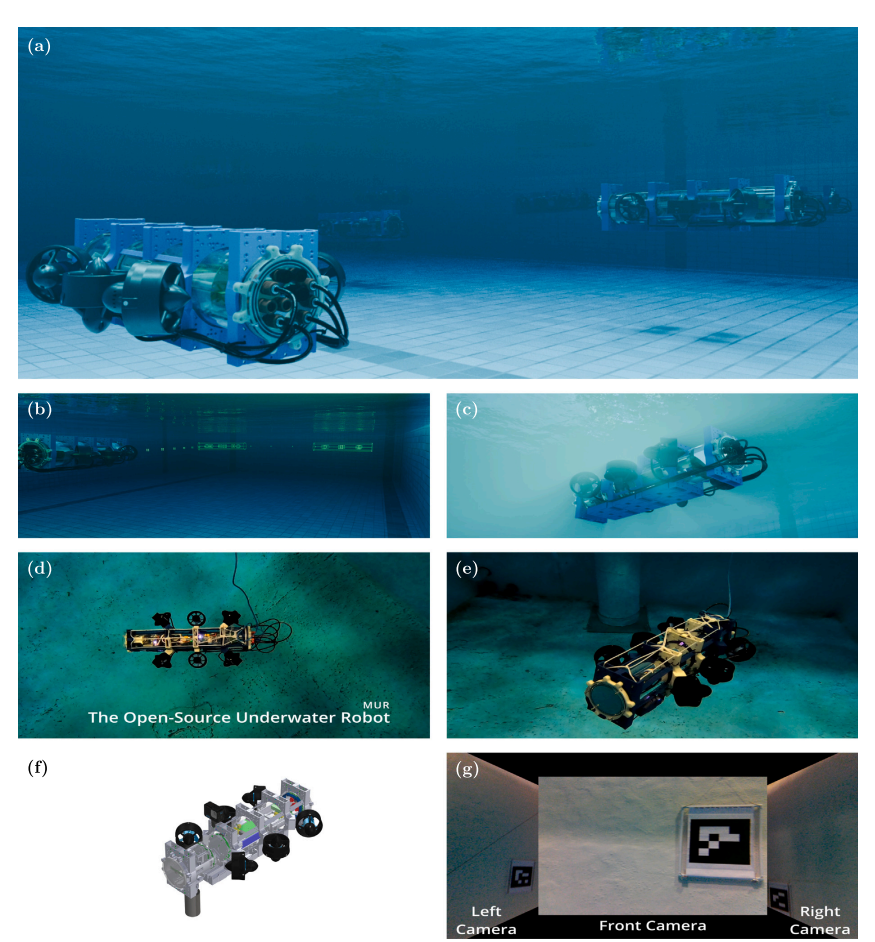
- Perception capabilities: Supports up to 5 cameras with vision- and ML-based perception
- Communication: Underwater acoustic modem, surface Wi-Fi, and high-speed Ethernet tether
- Operating modes: Supports autonomous navigation, remote teleoperation, and multi-robot expansion
- ROS-based: Modular package structure, topic/service-based communication, and full system launch via
mur.launch - Real-time processing: Sensor fusion with a unified architecture for both simulation and real hardware
📌System Architecture

The system architecture of MUR is composed of the following core components.
- MUR Compute Module Mini
- MUR Sensor and ESC Control
- MUR ESC to Thruster Control
1. MUR Compute Module Mini

It serves as the brain of MUR, running the full ROS-based software stack.
Key Features
- Raspberry Pi Compute Module 4 Integration
- Teensy 4.0 Microcontroller
- CC1101 Radio Module Slot
- 6-Port USB 2.0 Hub
- 3-Port Ethernet
- I2C Interfaces:
- HDMI Port
- 5V Fan Port
- USB OTG Port
- Leak Detection Sensors
Functionality
The Compute Module Mini serves as the central coordinator for the MUR, responsible for:
- It processes sensor data and executes control algorithms.
- It manages and relays communication between internal subsystems and external controllers.
- It provides interfaces for monitoring, debugging, and updates.
- It maintains system stability and reliability through power and thermal management.
2. MUR Sensor and ESC Control
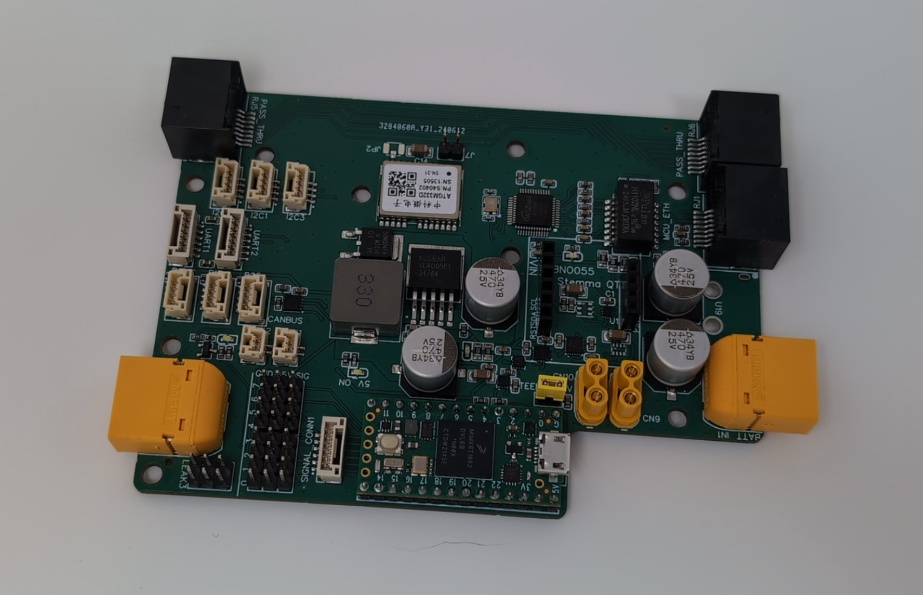
The MUR Sensor and ESC Control PCB is dedicated to precise sensor data acquisition and efficient motor control, ensuring accurate environmental awareness and responsive maneuverability.
Key Features
- Integrated Sensors
- IMUs, Magnetometers, Accelerometer, Environmental Sensors
- I/O Interfaces
- Three I2C ports, Two serial ports, Three CAN bus channels, Eight PWM outputs
- Ethernet Connectivity
- W5500 Ethernet controller: Ensures stable, high-speed wired networking.
- RJ45 connector with passthrough
- Power Management
- XT60 and XT30 connectors
- Leak Detection
- Two JST connectors plus three header pins
Functionality
- It collects and processes environmental and positional data essential for autonomous operation and decision-making.
- Through ESC control, it precisely regulates thruster speed, enabling accurate and agile maneuvering.
- It facilitates smooth data and command flow between sensors, actuators, and the central computing module.
- It detects early signs of leakage and performs appropriate response actions to enhance system safety.
3. MUR ESC to Thruster Control
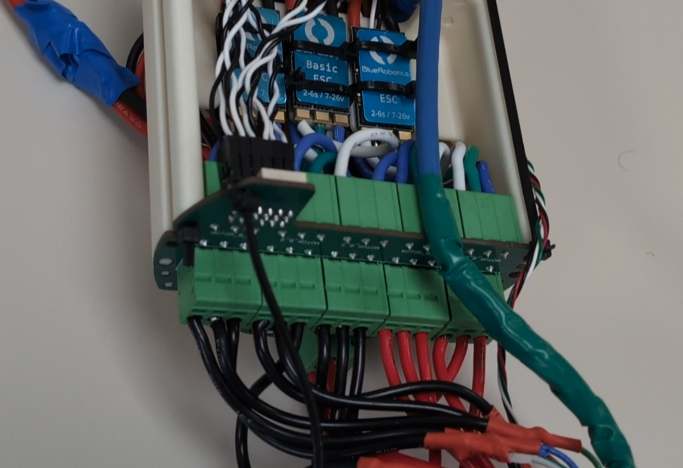
The MUR ESC-to-Thruster Control PCB acts as the propulsion system’s power distribution center, delivering stable and efficient power to each thruster.
Key Features
- ESC Connectivity
- Thruster Connections
- Power Distribution
- Compact and Robust Design
Functionality
- Distributing power efficiently from the main power source to all thrusters through ESCs.
- Providing reliable and maintainable connections between ESCs and thrusters, reducing downtime and simplifying repairs.
- Handling the propulsion system’s high current safely while preserving overall performance and reliability.
📌Role and Application of the W5500
The W5500 is used in MUR as a key Ethernet communication module that links the Teensy-based embedded board with the upper-level ROS computer. In underwater environments where wireless communication is unreliable, all sensor streaming and control command transmission are handled through the W5500 to ensure stable data exchange. The EthernetManager in the Teensy firmware manages network configuration and packet handling, providing a low-latency and highly reliable communication structure.
Main Roles of the W5500
- Establishing a Wired Communication Backbone
- Provides a stable Ethernet channel connecting the Teensy and the upper-level ROS computer.
- Sensor Data Transmission
- Streams IMU, pressure, and environmental sensor data in real time over UDP.
- Receiving Control Commands
- Receives thrust commands, mode-switch signals, and other control instructions from the upper system in real time.
- Automated Network Management
- The EthernetManager automatically handles IP configuration, socket management, and link status detection.
Key Benefits
- Enables real-time control without noticeable latency, even in underwater environments where wireless signals rapidly attenuate
- Minimizes MCU processing load, improving sensor handling and thruster control performance
- Provides the high-reliability, low-latency data link required for research-grade and experimental AUVs
📌Market & Application Value
Key Application Areas
- Marine and freshwater environmental research: Suitable for water-quality and environmental data collection, red tide and pollution monitoring, and various ecological studies
- Underwater robot control and autonomy research: Validated as a research platform for state estimation, path planning, SLAM, and related academic applications
- Educational and training platform: Ideal as a hands-on AUV for marine robotics courses in universities and research institutions, supporting learning in ROS, sensor fusion, and underwater communication
Advantages (Compared to Existing Alternatives)
- Significantly lower cost than commercial AUVs (approximately $700–$1,600)
- Fully open-source hardware and software, making customization and repair easy
- ROS-based architecture enables immediate integration with existing algorithms, SLAM frameworks, and control modules
Expansion Potential
- Can be extended into a multi-robot (swarm) research platform
- Can evolve into a cooperative exploration and underwater networking platform by integrating underwater communication devices such as BlueBuzz and additional sensors
📌External Indicators
Github
- ⭐ 37 Stars
- 👀 2 Watching
- ⑂ 6 Forks
Use in laboratories and institutions
1. HKUST (https://ri.hkust.edu.hk/research/marine-robotics)

HKUST (Hong Kong University of Science and Technology) Marine Robotics introduces MUR as “a core platform for future underwater academic research.”
2. ROAR Lab (https://sites.nd.edu/roarlab/underwater-vehicle-navigation)
The ROAR Lab at the University of Notre Dame in the United States is using MUR as an AUV platform for research on underwater state estimation and path planning.
📌WIZnet Strategic Value
- Underwater, Wi-Fi attenuates rapidly and radio bandwidth is extremely limited, making wired Ethernet the most reliable option for real-time monitoring, control, and high-volume data transfer.
- MUR reflects this reality by adopting tethered Ethernet as its primary connection method, a design choice that aligns well with the high compatibility and reliability of WIZnet Ethernet chipsets.
- WIZnet modules can be applied directly to underwater network infrastructure such as base stations, underwater–surface bridges, and multi-robot management nodes.
- When combined with underwater communication systems like BlueBuzz, they can also enable applications such as hybrid underwater–surface gateways..
📌Summary
MUR is a small underwater robot platform that combines open-source hardware with a ROS-based software stack, offering a level of completeness well suited for research and education. Despite its low cost, it provides multi-axis control, a wide range of sensors, and a full simulation environment, making it an excellent experimental platform. Its architecture is particularly notable for supporting the sensor processing, autonomous control, and multi-robot scalability required in underwater applications.
📌개요
MUR(Miniature Underwater Robot)는 수중 탐사, 환경 모니터링, 로보틱스 연구를 위해 설계된 오픈소스 소형 수중 로봇 플랫폼입니다.
기존의 수중 실험과 탐사는 여러 가지 어려움을 가지고 있습니다:
- 장비가 매우 고가이며
- 운용과 개발에 전문적인 기술이 필요하고
- 테스트 탱크나 수중 실험 장소와 같은 적절한 시설이 요구되는 경우가 많습니다.
이 때문에 작은 연구실, 교육 단체, 취미 기반 커뮤니티는 참여하기가 쉽지 않습니다.
이러한 장벽을 낮추기 위해 MUR 프로젝트는 하드웨어와 소프트웨어를 모두 오픈소스로 공개하고,
ROS 기반 네트워크 아키텍처를 채택했습니다.
핵심 목표는 연구자, 교육자, 메이커가 저비용으로 실제 수중 로봇 실험을 수행할 수 있도록 하는 것입니다.
📌특징
- 정밀 제어: 위치·자세 제어와 경로 추종을 지원하는 5자유도(5-DOF) 추진 시스템
- 센싱: 내장 IMU, 압력 센서, 온도/습도 센서, 누수 감지 센서 탑재, 추가로 GPS 및 환경 센서 확장 가능
- 인지 기능: 최대 5대의 카메라를 지원하며, 비전·머신러닝 기반 인지 기능 제공
- 통신: 수중 음향 모뎀, 수면 Wi-Fi, 고속 이더넷 테더 지원
- 운용 모드: 자율 항법, 원격 조종(테더/무선), 다중 로봇 확장 지원
- ROS 기반: 모듈형 패키지 구조, 토픽/서비스 기반 통신, mur.launch를 통한 전체 시스템 구동
- 실시간 처리: 시뮬레이션과 실제 하드웨어 모두에 적용 가능한 통합 아키텍처 기반 센서 융합 처리
📌시스템 아키텍처
MUR의 시스템 아키텍처는 다음과 같은 핵심 구성 요소로 이루어져 있습니다.
- MUR 컴퓨트 모듈 미니 (MUR Compute Module Mini)
- MUR 센서 및 ESC 제어 모듈 (MUR Sensor and ESC Control)
- MUR ESC-to-추력기 제어 모듈 (MUR ESC to Thruster Control)
1. MUR Compute Module Mini
MUR의 두뇌 역할을 하며, 전체 ROS 기반 소프트웨어 스택을 실행합니다.
주요 특징
- Raspberry Pi Compute Module 4 통합
- Teensy 4.0 마이크로컨트롤러
- CC1101 무선 통신 모듈 슬롯
- 6포트 USB 2.0 허브
- 3포트 이더넷
- I2C 인터페이스
- HDMI 포트
- 5V 팬 포트
- USB OTG 포트
- 누수 감지 센서
기능
- Compute Module Mini는 MUR의 중앙 코디네이터 역할을 하며 다음을 담당합니다:
- 센서 데이터를 처리하고 제어 알고리즘을 실행합니다.
- 내부 서브시스템과 외부 컨트롤러 간의 통신을 관리하고 중계합니다.
- 모니터링, 디버깅, 업데이트를 위한 인터페이스를 제공합니다.
- 전원 및 열 관리 기능을 통해 시스템 안정성과 신뢰성을 유지합니다.
2. MUR Sensor and ESC Control
MUR 센서 및 ESC 제어 PCB는 정밀한 센서 데이터 수집과 효율적인 모터 제어에 최적화되어 있으며, 이를 통해 정확한 환경 인지와 민첩한 기동성을 보장합니다.
주요 특징
- 통합 센서 (Integrated Sensors)
- IMU
- 자력계(Magnetometer)
- 가속도계(Accelerometer)
- 환경 센서(온도/습도 등 Environmental Sensors)
- I/O 인터페이스 (I/O Interfaces)
- 3× I2C 포트
- 2× 시리얼 포트
- 3× CAN 버스 채널
- 8× PWM 출력
- 이더넷 연결 (Ethernet Connectivity)
- W5500 이더넷 컨트롤러: 안정적이고 고속의 유선 네트워크 제공
- RJ45 커넥터(패스스루 지원)
- 전원 관리 (Power Management)
- XT60 및 XT30 커넥터 제공
- 누수 감지 (Leak Detection)
- 2× JST 커넥터 + 3개의 헤더 핀 지원
기능
- 자율 운용과 의사결정에 필수적인 환경 및 위치 데이터를 수집·처리합니다.
- ESC 제어를 통해 추력기 속도를 정밀하게 조절하여 정확하고 민첩한 기동을 지원합니다.
- 센서·액추에이터·중앙 컴퓨팅 모듈 간 데이터 및 명령 흐름을 원활하게 유지합니다.
- 초기 누수 징후를 감지하고 적절한 대응 동작을 수행하여 시스템 안전성을 향상합니다.
3. MUR ESC to Thruster Control
MUR ESC-to-Thruster Control PCB는 추진 시스템의 전력 분배 센터 역할을 하며, 각 추력기에 안정적이고 효율적인 전력을 공급합니다.
주요 특징
- ESC 연결(ESC Connectivity)
- 추력기 연결(Thruster Connections)
- 전력 분배(Power Distribution)
- 컴팩트하고 견고한 설계(Compact and Robust Design)
기능
- 메인 전원에서 ESC를 거쳐 모든 추력기로 전력을 효율적으로 분배합니다.
- ESC와 추력기 간의 연결을 안정적이고 유지보수가 용이하도록 제공하여 다운타임을 줄이고 수리를 단순화합니다.
- 추진 시스템의 고전류 요구를 안전하게 처리하면서 전체 성능과 신뢰성을 유지합니다.
📌W5500 역할 및 적용 방식
W5500은 MUR에서 Teensy 기반 임베디드 보드와 상위 ROS 컴퓨터를 연결하는 핵심 이더넷 통신 모듈로 사용됩니다. 무선이 어려운 수중 환경에서 안정적인 데이터 교환을 위해, 모든 센서 스트리밍과 제어 명령 전송이 W5500을 통해 처리됩니다. Teensy 펌웨어의 EthernetManager가 네트워크 설정과 패킷 처리를 전담해 지연이 짧고 신뢰성이 높은 통신 구조를 구현합니다.
W5500의 주요 역할
- 유선 통신 기반 확보
- Teensy와 상위 ROS 컴퓨터를 연결하는 안정적인 이더넷 채널 제공
- 센서 데이터 전송
- IMU·압력·환경 센서 데이터를 UDP로 실시간 스트리밍
- 제어 명령 수신
- 상위 시스템의 추력·모드 전환 등 제어 신호를 실시간으로 수신
- 네트워크 관리 자동화
- IP 설정, 소켓 관리, 링크 상태 감지 등 운영을
EthernetManager가 자동 처리핵심 효과
- 무선 전파가 급격히 감쇠되는 수중에서도 지연 없는 실시간 제어 구현
- MCU 부담을 최소화하여 센서 처리·추력 제어 성능 향상
- 연구용·실험용 AUV에서 요구되는 고신뢰·저지연 데이터 링크 확보
📌시장 및 응용 가치
주요 활용 분야
- 해양·내수 환경 연구: 수질·환경 데이터 수집, 적조·오염 모니터링 등 다양한 연구에 활용
- 수중 로봇 제어/자율주행 연구: 상태 추정, 경로 계획, SLAM 등 학술 연구용 플랫폼으로 검증됨
- 교육·훈련용 플랫폼: 대학·연구기관의 해양 로봇 교육에서 실습용 AUV로 적합하며 ROS·센서퓨전·수중통신 학습에 유리
장점 (기존 대안 대비)
- 상용 AUV 대비 매우 낮은 비용(약 $700–$1,600)
- 하드웨어·소프트웨어 완전 오픈소스로 커스터마이징과 수리가 쉬움
- ROS 기반 구조라 기존 알고리즘·SLAM·제어 모듈과 바로 연동 가능
확장 가능성
- 멀티 로봇(스웜) 연구 플랫폼으로 확장 가능
- BlueBuzz 등 수중 통신 장비와 추가 센서를 통합해 협력 탐사·수중 네트워크 연구로 확장 가능
📌조회수 및 반응
Github
- ⭐ 37 Stars
- 👀 2 Watching
- ⑂ 6 Forks
실험실 및 기관에서의 사용
1. HKUST (https://ri.hkust.edu.hk/research/marine-robotics)
홍콩과기대(HKUST) 해양 로보틱스 연구팀은 MUR을 “향후 수중 학술 연구의 핵심 플랫폼”으로 소개하고 있습니다.
2. ROAR Lab (https://sites.nd.edu/roarlab/underwater-vehicle-navigation)
The ROAR Lab at the University of Notre Dame in the United States is using MUR as an AUV platform for research on underwater state estimation and path planning.
📌WIZnet 전략적 가치
- 수중 환경에서는 Wi-Fi 신호가 빠르게 감쇠되고 무선 대역폭도 극도로 제한되기 때문에,
실시간 모니터링·제어·대용량 데이터 전송을 위해서는 유선 이더넷이 가장 신뢰할 수 있는 선택지입니다.- MUR은 이러한 현실을 반영하여 테더드 이더넷을 기본 연결 방식으로 채택하고 있으며, 이는 WIZnet 이더넷 칩셋의 높은 호환성과 안정성과도 잘 맞아떨어집니다.
- WIZnet 모듈은 기지국, 수중–수면 중계 장치, 다중 로봇 관리 노드 등과 같은 수중 네트워크 인프라에 직접 적용될 수 있습니다.
- 또한 BlueBuzz와 같은 수중 통신 시스템과 결합하면, 수중–수면 하이브리드 게이트웨이와 같은 응용도 구현할 수 있습니다.
📌요약
MUR은 오픈소스 하드웨어와 ROS 기반 소프트웨어 스택을 결합한 소형 수중 로봇 플랫폼으로, 연구와 교육에 적합한 높은 완성도를 갖추고 있습니다.
저비용임에도 불구하고 다축 제어, 다양한 센서, 완전한 시뮬레이션 환경을 제공하여 우수한 실험 플랫폼으로 평가됩니다.
특히 수중 환경에서 요구되는 센서 처리, 자율 제어, 다중 로봇 확장성을 모두 지원하는 아키텍처가 돋보입니다.