
ESP32-AIO-AG
ESP32-AIO-AG is an ESP32-S3-based All-in-One board firmware for AgOpenGPS-compatible autonomous steering.
WIZnet - W6100
x 1
📌 Overview
ESP32-AIO-AG는 AgOpenGPS 호환 자율 조향용 ESP32-S3 기반 All-in-One 보드 펌웨어입니다. 농기계의 GPS 위치, IMU 자세 정보, 조향각 센서, 모터 제어 신호를 통합하고, AgOpenGPS와 유선 Ethernet 기반 UDP 통신으로 데이터를 주고받는 구조입니다. 공개 README 기준으로 이 프로젝트는 ESP32-S3, BNO08x IMU, u-blox GNSS, WIZnet W6100 Ethernet 라이브러리를 사용합니다.
AgOpenGPS?
AgOpenGPS는 트랙터나 농기계를:
- GPS 기반으로 직진시키고
- 자동으로 조향하고
- 경로를 따라 움직이게 하는
오픈소스 농업 자동화 프로그램입니다.
📌 Features
AgOpenGPS 호환 UDP 통신
- Autosteer, GPS 데이터를 UDP로 송수신합니다.
- 코드 기준 포트는 AgOpenGPS 9999, Steering 8888, GPS 2233으로 정의되어 있습니다.
ESP32-S3 기반 통합 제어
- MCU는 ESP32-S3이며 PlatformIO/Arduino 환경으로 빌드됩니다.
IMU + GNSS + 조향 제어 통합
- BNO08x IMU와 SparkFun u-blox GNSS 라이브러리를 사용합니다.
W6100 기반 유선 Ethernet
- W6100 SPI 핀 정의와 W6100 전용 Ethernet 초기화 코드가 포함되어 있습니다.
RTOS 태스크 구조
- README에는
tasks.cpp,tasks.h가 RTOS task 정의 파일로 설명되어 있어 센서 처리, 네트워크, 제어 로직 분리에 적합한 구조입니다.
📌 Features
GPS 기반 자동 조향 제어
- GPS 위치 데이터를 읽어 농기계가 설정된 경로를 따라 주행하도록 지원
- AgOpenGPS와 연동하여 직선 주행 및 자동 조향 기능을 수행
IMU 기반 자세 및 방향 보정
- 자이로·기울기(IMU) 센서를 사용해 차량의 기울기와 방향 변화를 실시간으로 측정
- 울퉁불퉁한 농지 환경에서도 보다 안정적인 주행 보정이 가능
핸들 각도(WAS) 실시간 측정
- WAS(Wheel Angle Sensor)를 통해 현재 조향 각도를 확인
- 목표 조향값과 실제 핸들 위치를 비교하여 정밀한 자동 조향 제어를 수행
모터 기반 실제 조향 동작
- ESP32 보드가 조향 모터를 직접 제어하여 트랙터 핸들을 자동으로 움직임
- 단순 데이터 표시가 아니라 실제 농기계 조향 시스템 제어까지 수행하는 구조
WIZnet Ethernet 기반 안정적 통신
- W6100 Ethernet 칩을 사용하여 AgOpenGPS PC와 유선 UDP 통신을 수행
- Wi-Fi 대비 통신 안정성이 높아 농기계와 같은 실시간 제어 환경에 적합
📌 System Architecture
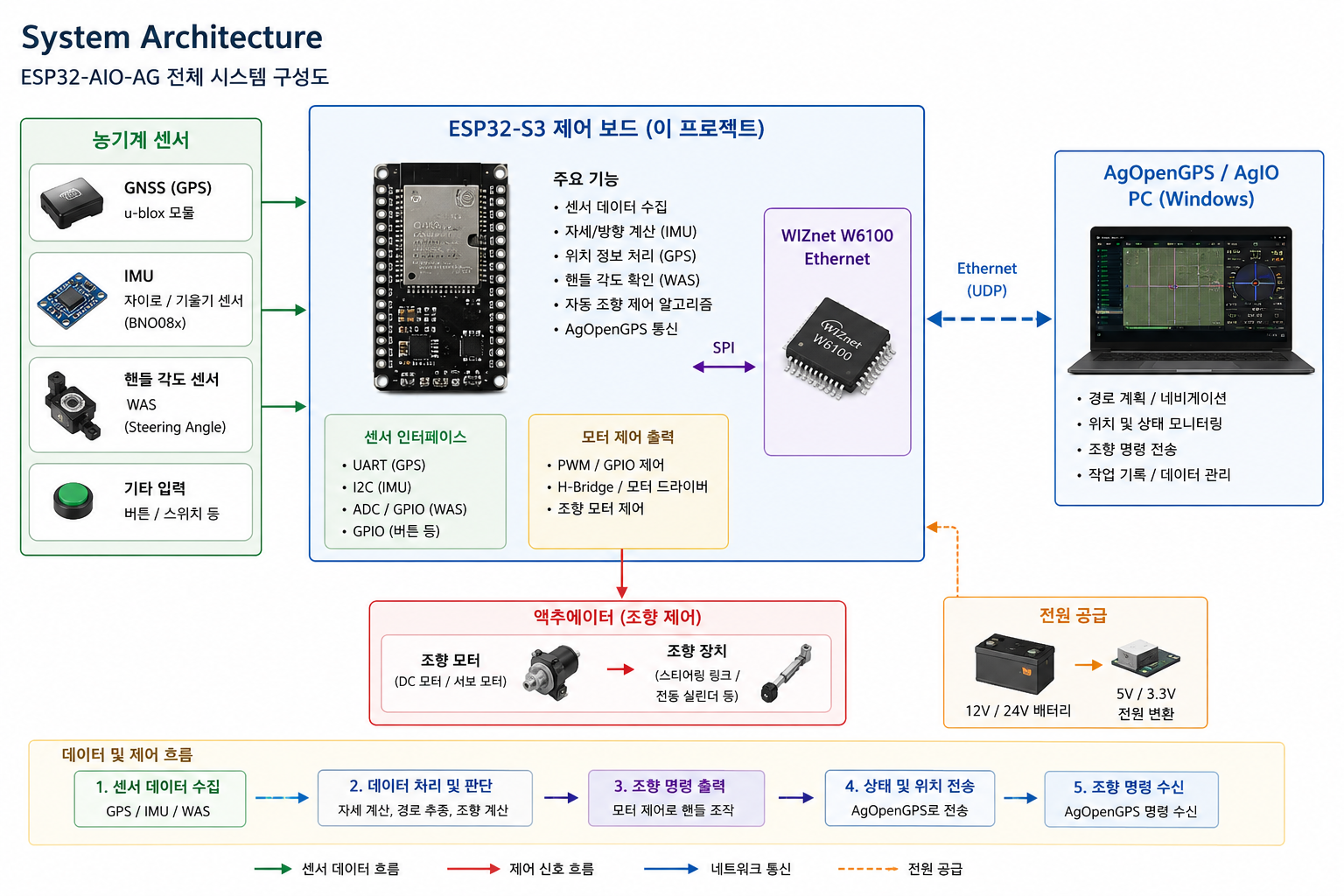
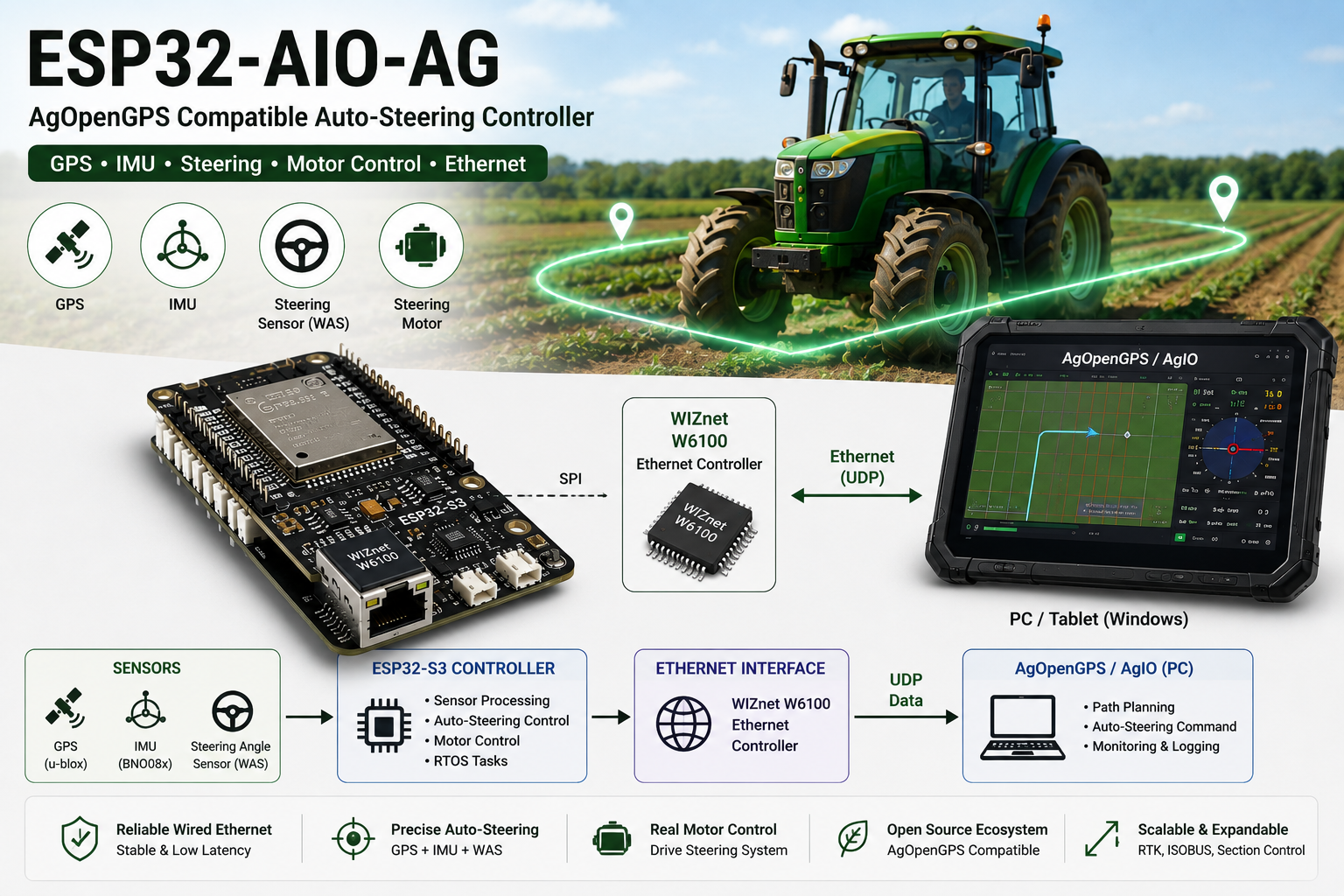
전체 시스템은 센서 데이터 수집 → 실시간 제어 처리 → Ethernet 기반 AgOpenGPS 통신 구조로 동작합니다.
농기계 내부의 GNSS 모듈(u-blox), IMU(BNO08x), 조향각 센서 등에서 수집된 데이터는 ESP32-S3 메인 제어 보드로 전달됩니다. ESP32-S3는 센서 데이터를 실시간으로 처리하여 차량 자세, 이동 방향, 조향 상태를 계산하고, 자율조향 제어 로직을 수행합니다.
네트워크 계층에서는 WIZnet W6100 Ethernet Controller가 사용됩니다. W6100은 ESP32-S3와 SPI로 연결되며, AgOpenGPS/AgIO가 실행되는 PC와 UDP 기반으로 통신합니다. 이를 통해 GPS 위치 정보, 조향 상태, 제어 명령 데이터를 안정적으로 송수신합니다.
전체 데이터 흐름은 다음과 같습니다.
GNSS / IMU / Steering Sensor
→ ESP32-S3 제어 및 센서 처리
→ W6100 Ethernet 통신
→ AgIO / AgOpenGPS PC 소프트웨어
이 구조는 Wi-Fi 기반 무선 통신 대비 지연과 패킷 손실 가능성을 줄일 수 있어, 농기계 자율조향과 같은 실시간 제어 환경에 적합합니다. 또한 센서 처리와 네트워크 처리가 분리된 구조이므로 향후 RTK-GNSS, Section Control, ISOBUS 연동 등으로 확장 가능성이 있습니다.
📌 Role and Application of the WIZnet's Chip
사용한 WIZnet 칩 : W6100
소스코드
https://github.com/AnttiJalomaki/ESP32-AIO-AG/blob/master/src/network/ethernet.cpp
W6100의 역할은 ESP32-S3 보드에 유선 Ethernet 인터페이스를 제공하는 것입니다. 이 프로젝트에서는 TCP 서버보다 UDP 기반 실시간 제어 데이터 송수신이 핵심이며, 이는 농기계 자율조향처럼 지연과 연결 안정성이 중요한 환경에 적합합니다.
📌 Market & Application Value
이 프로젝트의 1차 시장은 정밀농업, 농기계 자율조향, RTK-GNSS 기반 농업 자동화입니다. AgOpenGPS 자체가 오픈소스 정밀농업 플랫폼이며, Windows 태블릿과 커뮤니티 하드웨어를 조합해 센티미터급 GPS 기반 조향을 구현하는 방향으로 설명되어 있습니다.
시장성 측면에서 B2C보다는 농기계 개조 업체, 농업 자동화 솔루션 업체, 정밀농업 SI 업체, 오픈소스 농업 장비 커뮤니티에 가까운 B2B/B2B2C 성격이 강합니다.
기존 Wi-Fi 기반 ESP32 프로젝트와 비교하면, W6100 기반 유선 Ethernet은 농기계 내부의 금속 구조, 장거리 작업, 전파 간섭 환경에서 더 안정적인 통신 구성이 가능하다는 점이 차별 요소입니다. 다만 방수, 진동, 전원 노이즈, ESD, 커넥터 고정, EMC 인증 등 산업 환경 검증은 현재 공개 자료 기준으로 확인되지 않습니다.
📌 WIZnet Strategic Value
ESP32-AIO-AG는 WIZnet Maker 생태계에서 의미가 있습니다. 첫째, W6100을 정밀농업 자율조향이라는 특수 응용에 연결했습니다. 둘째, ESP32-S3와 W6100 조합이 단순 IoT 게이트웨이를 넘어 센서·제어·네트워크 통합 보드로 확장될 수 있음을 보여줍니다.
📌 Summary
ESP32-AIO-AG는 WIZnet W6100을 활용한 ESP32-S3 기반 AgOpenGPS 자율조향 통신·제어 프로젝트입니다. 현재 외부 반응 지표는 낮지만, 적용 분야가 명확하고 W6100의 유선 Ethernet 장점을 농업 자동화 환경에 연결했다는 점에서 신규성과 전략적 가치가 있습니다.
다만 양산성 측면에서는 아직 회로도, BOM, 인증, 환경 시험, 릴리스 패키지 자료가 부족합니다. 따라서 현재 평가는 **“제품화 직전”이 아니라 “WIZnet 칩의 산업·농업 응용 가능성을 보여주는 유망한 초기 UCC”**로 정리하는 것이 적절합니다.
📌 FAQ
Q1. ESP32-AIO-AG란 무엇인가요?
ESP32-AIO-AG는 AgOpenGPS용으로 설계된 ESP32-S3 기반 자동 조향 컨트롤러입니다.
농기계 자동화를 위해 GPS, IMU, 조향각 센서, 모터 제어, Ethernet 통신 기능을 하나의 시스템으로 통합한 구조입니다.
Q2. AgOpenGPS는 어떤 역할을 하나요?
AgOpenGPS는 오픈소스 기반 정밀농업 소프트웨어 플랫폼입니다.
트랙터가 GPS 기반 경로를 자동으로 따라 주행할 수 있도록 지원하며, 자동 조향, 경로 계획, 필드 내비게이션 기능 등을 제공합니다.
Q3. 이 프로젝트에서 WIZnet W6100을 사용하는 이유는 무엇인가요?
W6100은 ESP32 컨트롤러와 AgOpenGPS PC 소프트웨어 간의 안정적인 유선 Ethernet 통신을 제공합니다.
Wi-Fi 기반 통신과 비교하면, 유선 UDP 통신은 지연 시간이 낮고 농업 환경과 같은 노이즈가 많은 환경에서도 더 높은 안정성을 제공합니다.
Q4. 시스템에는 어떤 센서가 사용되나요?
이 프로젝트에서는 다음 센서를 사용합니다.
GNSS (u-blox GPS 모듈)
IMU 센서 (BNO08x)
조향각 센서 (WAS)
이 센서들은 차량의 위치, 방향, 기울기, 조향 상태를 실시간으로 계산하는 데 사용됩니다.
Q5. 실제로 트랙터 조향을 제어하나요?
네.
ESP32 보드는 센서 데이터를 처리하고 조향 모터를 직접 제어하여, 트랙터 핸들이나 조향 장치를 자동으로 움직일 수 있도록 합니다.
Q6. 상용 제품 수준인가요?
현재 공개 자료 기준으로는 오픈소스 프로토타입 또는 개발 단계 플랫폼에 가깝습니다.
인증, 산업 환경 검증, 방수 설계, 양산 준비 상태 등에 대한 정보는 아직 공개적으로 확인되지 않았습니다.
Q7. 이 프로젝트가 WIZnet 관점에서 가지는 의미는 무엇인가요?
이 프로젝트는 WIZnet Ethernet 솔루션이 단순 IoT 네트워크를 넘어, 실시간 산업·농업 자동화 시스템에도 적용될 수 있음을 보여줍니다.
또한 W6100이 정밀농업 환경에서 안정적인 통신을 지원할 수 있다는 점을 보여주는 사례입니다.
📌 Overview
ESP32-AIO-AG is an ESP32-S3-based All-in-One board firmware for AgOpenGPS-compatible autonomous steering. It integrates GPS positioning, IMU orientation data, steering angle sensors, and motor control signals for agricultural machinery, and exchanges data with AgOpenGPS through wired Ethernet-based UDP communication. According to the public README, this project uses ESP32-S3, BNO08x IMU, u-blox GNSS, and the WIZnet W6100 Ethernet library.
What is AgOpenGPS?
AgOpenGPS is an open-source agricultural automation program that allows tractors or agricultural machinery to:
- Drive straight using GPS
- Steer automatically
- Follow predefined paths autonomously
📌 Features
AgOpenGPS-Compatible UDP Communication
- Autosteer and GPS data are transmitted and received via UDP.
According to the code, the ports are defined as AgOpenGPS 9999, Steering 8888, and GPS 2233.
Integrated Control Based on ESP32-S3
- The MCU is ESP32-S3 and is built using the PlatformIO/Arduino environment.
Integrated IMU + GNSS + Steering Control
- It uses the BNO08x IMU and the SparkFun u-blox GNSS library.
W6100-Based Wired Ethernet
- The project includes W6100 SPI pin definitions and W6100-specific Ethernet initialization code.
RTOS Task Structure
- The README describes tasks.cpp and tasks.h as RTOS task definition files, making the structure suitable for separating sensor processing, networking, and control logic.
📌 Features
GPS-Based Automatic Steering Control
- Supports agricultural machinery in following predefined paths by reading GPS position data.
- Works with AgOpenGPS to perform straight-line driving and automatic steering functions.
IMU-Based Orientation and Direction Correction
- Uses gyro and tilt (IMU) sensors to measure the vehicle’s tilt and directional changes in real time.
- Provides more stable driving correction even in rough farmland environments.
Real-Time Steering Angle (WAS) Measurement
- Uses a WAS (Wheel Angle Sensor) to monitor the current steering angle.
- Performs precise automatic steering control by comparing the target steering value with the actual steering wheel position.
Motor-Based Actual Steering Operation
- The ESP32 board directly controls the steering motor to automatically move the tractor steering wheel.
- The system is designed not only for displaying data but also for controlling the actual agricultural machinery steering system.
Stable Communication Based on WIZnet Ethernet
- Uses the W6100 Ethernet chip to perform wired UDP communication with the AgOpenGPS PC.
- Compared to Wi-Fi, it provides higher communication stability, making it suitable for real-time control environments such as agricultural machinery.
📌 System Architecture
The overall system operates with a structure of sensor data collection → real-time control processing → Ethernet-based AgOpenGPS communication.
Data collected from the agricultural machinery’s GNSS module (u-blox), IMU (BNO08x), steering angle sensor, and other devices are transmitted to the ESP32-S3 main control board. The ESP32-S3 processes the sensor data in real time to calculate vehicle orientation, movement direction, and steering status, while executing the autonomous steering control logic.
At the network layer, the WIZnet W6100 Ethernet Controller is used. The W6100 is connected to the ESP32-S3 via SPI and communicates with the PC running AgOpenGPS/AgIO through UDP-based communication. This enables stable transmission and reception of GPS position data, steering status, and control command data.
The overall data flow is as follows:
GNSS / IMU / Steering Sensor
→ ESP32-S3 Control and Sensor Processing
→ W6100 Ethernet Communication
→ AgIO / AgOpenGPS PC Software
This architecture reduces latency and packet loss compared to Wi-Fi-based wireless communication, making it suitable for real-time control environments such as autonomous steering for agricultural machinery. In addition, because sensor processing and network processing are separated, the system has future scalability for integration with RTK-GNSS, Section Control, ISOBUS, and other advanced agricultural functions.
📌 Role and Application of the WIZnet's Chip
WIZnet Chip Used: W6100
Source Code
https://github.com/AnttiJalomaki/ESP32-AIO-AG/blob/master/src/network/ethernet.cpp
The role of the W6100 is to provide a wired Ethernet interface to the ESP32-S3 board. In this project, the key focus is not a TCP server, but UDP-based real-time control data transmission and reception, which is suitable for environments where latency and connection stability are important, such as autonomous steering for agricultural machinery.
📌 Market & Application Value
The primary market for this project is precision agriculture, autonomous steering for agricultural machinery, and RTK-GNSS-based agricultural automation. AgOpenGPS itself is an open-source precision agriculture platform, described as a solution that combines Windows tablets with community-developed hardware to achieve centimeter-level GPS-based steering.
From a market perspective, it is more aligned with B2B/B2B2C markets rather than pure B2C, targeting agricultural machinery retrofit companies, agricultural automation solution providers, precision agriculture SI companies, and open-source agricultural equipment communities.
Compared to existing Wi-Fi-based ESP32 projects, the W6100-based wired Ethernet solution offers a key differentiating factor by enabling more stable communication in environments with metal structures inside agricultural machinery, long-distance operations, and radio interference. However, based on currently available public information, industrial-level validation for waterproofing, vibration resistance, power noise, ESD protection, connector retention, and EMC certification has not yet been confirmed.
📌 WIZnet Strategic Value
ESP32-AIO-AG is meaningful within the WIZnet Maker ecosystem. First, it connects the W6100 to the specialized application of precision agriculture autonomous steering. Second, it demonstrates that the combination of ESP32-S3 and W6100 can be expanded beyond a simple IoT gateway into an integrated board for sensors, control, and networking.
📌 Summary
ESP32-AIO-AG is an ESP32-S3-based AgOpenGPS autonomous steering communication and control project utilizing the WIZnet W6100. Although external response indicators are currently limited, the project has clear application areas and demonstrates novelty and strategic value by applying the wired Ethernet advantages of the W6100 to agricultural automation environments.
However, from a mass-production perspective, there is still a lack of publicly available materials such as schematics, BOM, certifications, environmental testing results, and release package documentation. Therefore, the current evaluation is more appropriately summarized not as “ready for commercialization,” but rather as “a promising early-stage UCC demonstrating the industrial and agricultural application potential of the WIZnet chip.”
📌 FAQ
Q1. What is ESP32-AIO-AG?
ESP32-AIO-AG is an ESP32-S3 based auto-steering controller designed for AgOpenGPS.
It integrates GPS, IMU, steering angle sensing, motor control, and Ethernet communication into a single system for agricultural vehicle automation.
Q2. What does AgOpenGPS do?
AgOpenGPS is an open-source precision farming software platform.
It helps tractors follow GPS-guided paths automatically and supports auto-steering, path planning, and field navigation.
Q3. Why is WIZnet W6100 used in this project?
The W6100 provides stable wired Ethernet communication between the ESP32 controller and AgOpenGPS PC software.
Compared to Wi-Fi, wired UDP communication offers lower latency and improved reliability in noisy agricultural environments.
Q4. What sensors are used in the system?
The project uses:
GNSS (u-blox GPS module)
IMU sensor (BNO08x)
Steering Angle Sensor (WAS)
These sensors allow the system to calculate vehicle position, direction, tilt, and steering status in real time.
Q5. Does the system actually control the tractor steering?
Yes.
The ESP32 board processes sensor data and directly controls a steering motor, allowing the tractor steering wheel or steering mechanism to move automatically.
Q6. Is this a commercial product?
Currently, the project appears to be an open-source prototype/development-stage platform.
Publicly available information about certifications, industrial validation, waterproof design, or commercial production readiness has not been confirmed.
Q7. What is the main value of this project for WIZnet?
This project demonstrates that WIZnet Ethernet solutions can be applied beyond basic IoT networking into real-time industrial and agricultural automation systems.
It also shows how W6100 can support stable communication in precision farming applications.