
W55RP20_CAN_TO_ETH
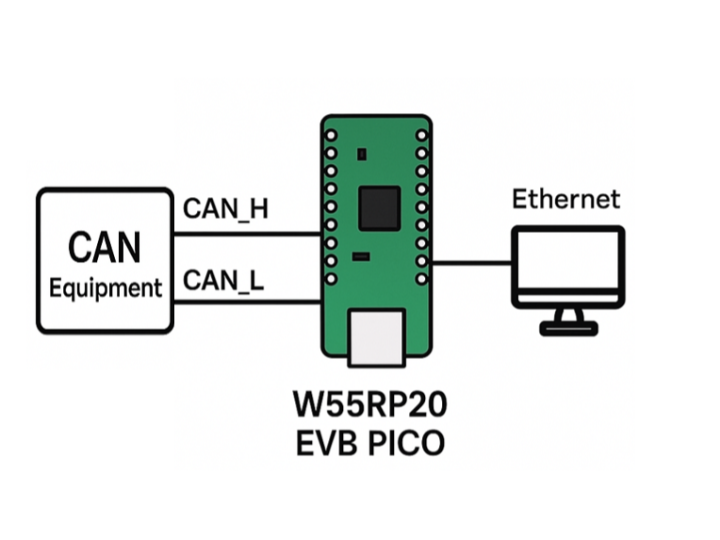
This example shows how to implement an Ethernet-to-CAN converter using the W55RP20 EVB PICO board.
WIZnet - W55RP20-EVB-Pico
x 1
github link : https://github.com/aimee0000/W55RP20_CAN_to_ETH/tree/main
RP2040 PIO CAN code link : https://github.com/KevinOConnor/can2040
CAN protocol?
1.Overview

The Controller Area Network (CAN) is a serial communication protocol used primarily for communication between microcontrollers and devices within a vehicle. It was developed for real-time data exchange and provides high reliability with robust error detection.
2.Key Features
- Multi-master, message-based communication: Priority-based message transmission between nodes
- High-speed data transfer: Up to 1Mbps (CAN FD supports up to 5–8Mbps)
- Strong error detection: Ensures reliability with CRC, ACK, and error frames
- Cost-effective: Simple 2-wire bus (CAN_H, CAN_L) for easy maintenance
3.Message Frame
- SOF (Start of Frame): Indicates the beginning of a frame
- Identifier (ID): Unique identifier that determines message priority (11-bit or 29-bit)
- Control Field: Contains data length information (DLC)
- Data Field: Actual transmitted data (0–8 bytes, up to 64 bytes in CAN FD)
- CRC (Cyclic Redundancy Check): Checksum for error detection
- ACK (Acknowledge): Indicates successful reception by other nodes
- EOF (End of Frame): Marks the end of the frame
Where CAN to Ethernet converter need?
1.PC to CAN Communication
PCs and servers typically lack CAN interfaces, so a converter bridges Ethernet and CAN.
2.Remote Monitoring & Control
Ethernet enables long-distance access to CAN networks for diagnostics or control.
3.Integration of Mixed Networks
In smart factories, devices with Ethernet and CAN need to communicate seamlessly.
4.Development & Testing Environments
Developers can simulate or test CAN communication over Ethernet when native CAN is unavailable.
How to test CAN to Ethernet?
Please refer to ReadMe on this page.
https://github.com/aimee0000/W55RP20_CAN_to_ETH/tree/main
-
W55RP20_CAN_TO_ETH
